

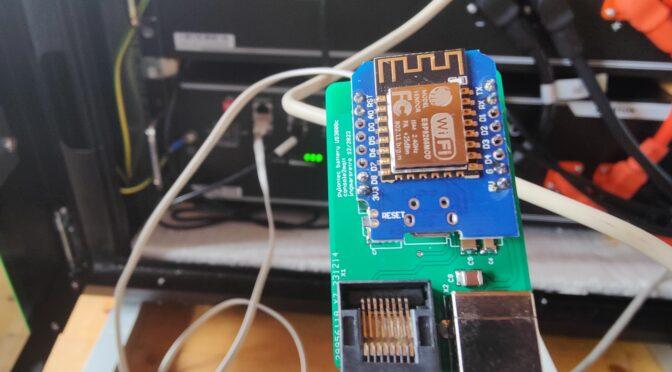
Repairing a TRADFRI smart plug – When the relay goes haywire
![]()
A quick note: Parts of the wording in this post were drafted with the help of AI. … (clearly recognizable in the style: A repair story from the world of smart Swedish furniture. The symptom: click-click-click… As so often happens, it started with an annoying noise. My TRADFRI socket from the big Swedish furniture store…
Read more









Recent Comments