Since I’ve been working on home automation, I’ve naturally wanted to optimize and simplify as much as possible and adapt and implement it in line with the new buzzwords “green electronics”, “sustainability”, “energy-saving” … and so on. For example, my appliances switch off when they are not used or ignored, stand-by energy consumption is largely avoided and IOT technology also prevents human forgetfulness (leaving windows open in winter or forgetting to switch lights off). As readers of the blog already know, I use systems such as HomeMatic, NodeRed and, for some time now, Homeassistant with ESPHome, Zigbee2Mqtt etc. Of course, the aim is also to keep all systems cloud-free. I don’t want the data to take a detour via some server in the Far East to switch a light on and off in my home. So, if possible, everything should take place within my own network and not “phone” to the outside and also work if I cut the data line.
For a long time now, various suppliers have been offering an extremely practical device for comfort in the parents’ quiet room. I’m talking about a space-saving way of accommodating the flicker box (nowadays also known as a flat-screen TV) in the room. I’m just mentioning terms like:
Speaka Professional TV ceiling mount electric motorized (1439178) or MyWall HL46ML … etc. Some of these devices can be controlled with a wireless remote control, others via the Tuya CloudApp. You can bypass the Tuya app via the Tuya IOT development environment and bring these devices into your home assistant via the “TuyaLocal” integration – it works – but it’s more of a “ONLY” solution. In my opinion, the ideal solution is to integrate these devices into the ESPHome system. Using the Speaka Professional TV ceiling mount as an example, I will show you how it can be integrated into the ESPHome network and thus into the Home Assistant with a small extension. This version of the SpeaKa part has no Internet connection and is only controlled via a wireless remote control.
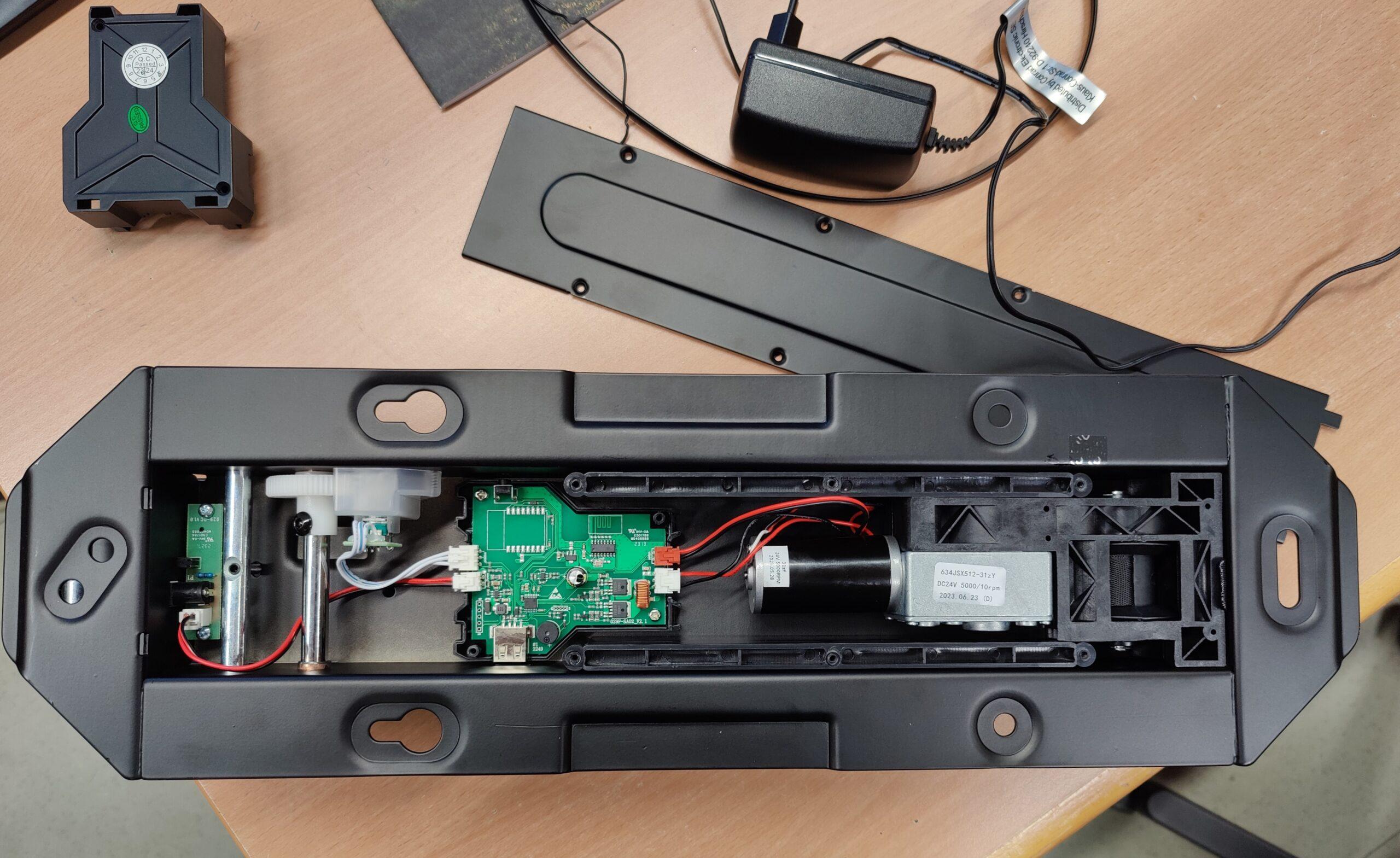
TV ceiling mount with open cover
With a little reverse engineering, we (my colleague Werner and myself) analyzed the existing appliance factory. The system is structured something like this:
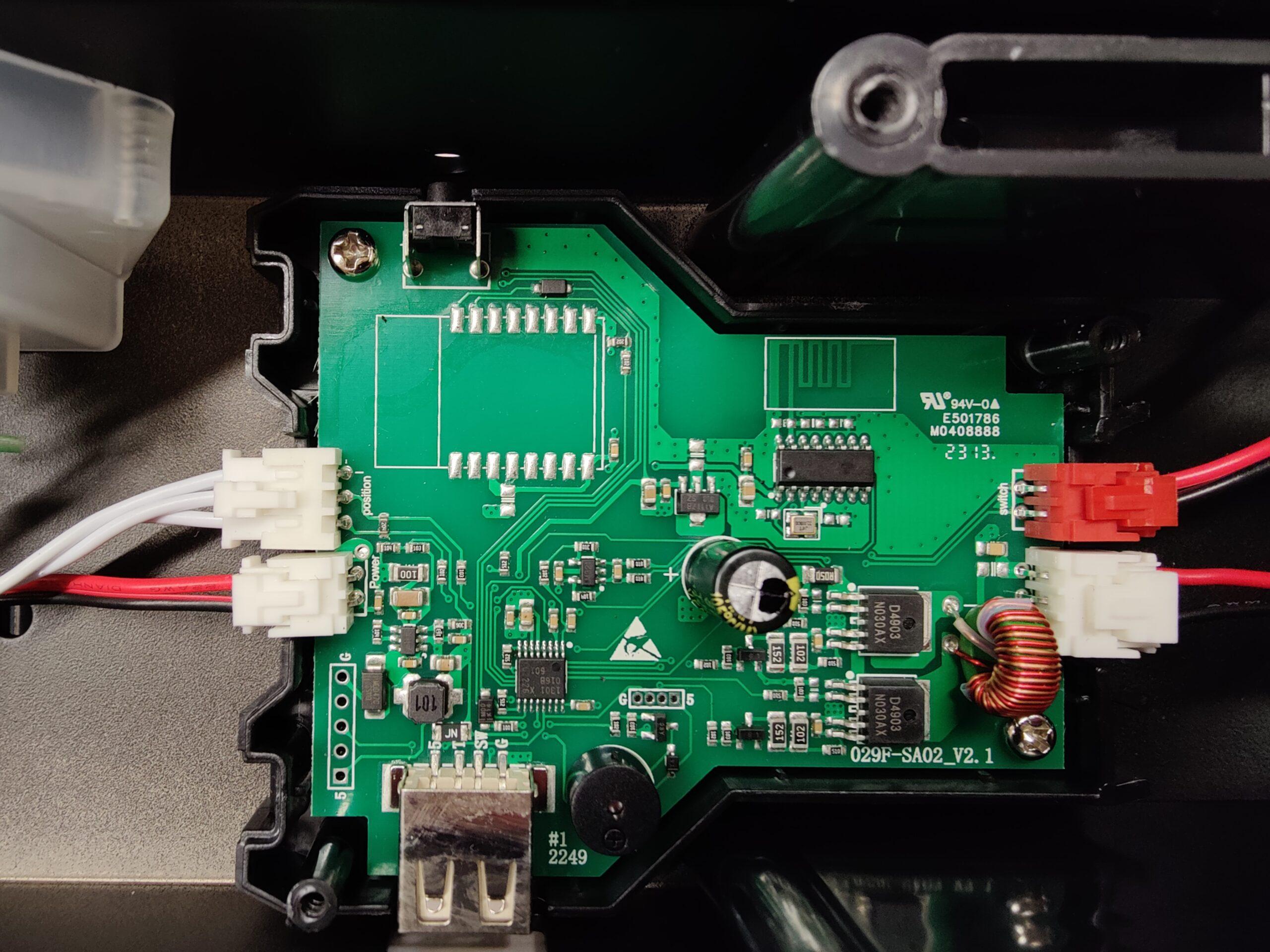
Circuit board in the ceiling bracket
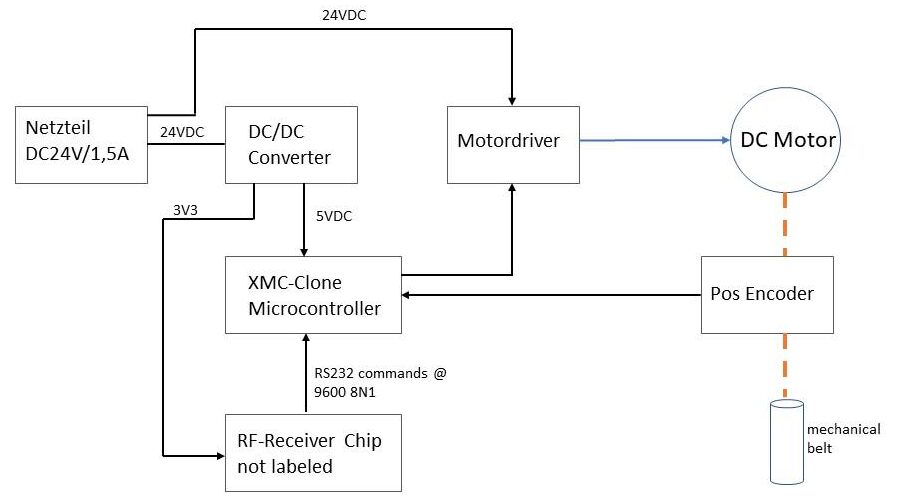
Systemdiagramm
The system diagram above shows how the circuit board is constructed. The power supply comes from a plug-in power supply with DC 24V output at 1.5A. On the board you can still see an unpopulated area whose solder pads are wired with +3V3, GND and RX, TX lines suitable for an ESP8266. A USB socket can also be seen. These two interfaces are not included in the diagram. We examined the RX/TX lines that are routed from the unpopulated solder pads (ESP8266) to the microcontroller (1301 X 016B). However, no signals could be measured here. (Presumably the interface is not activated in the flashed program version).
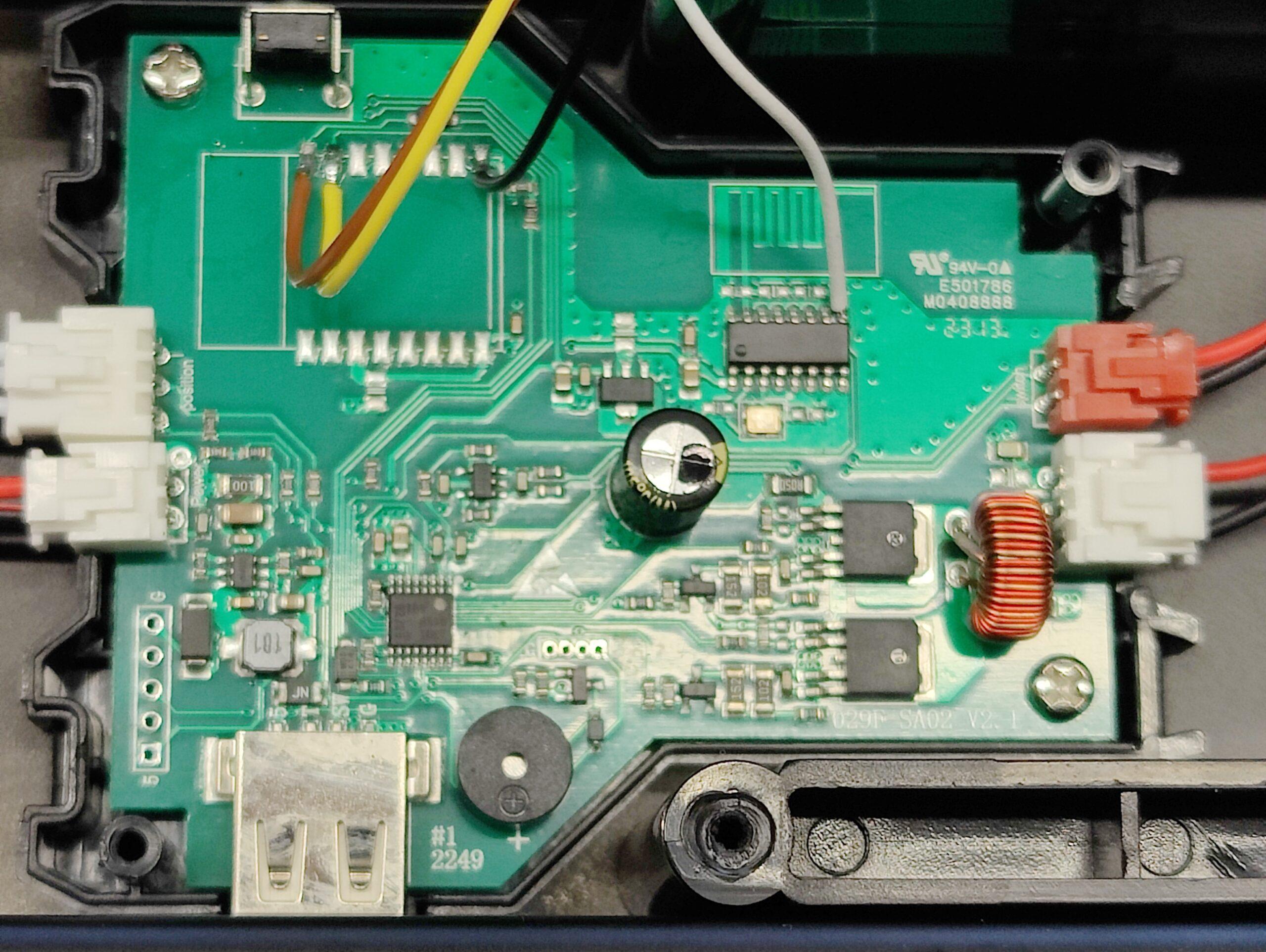
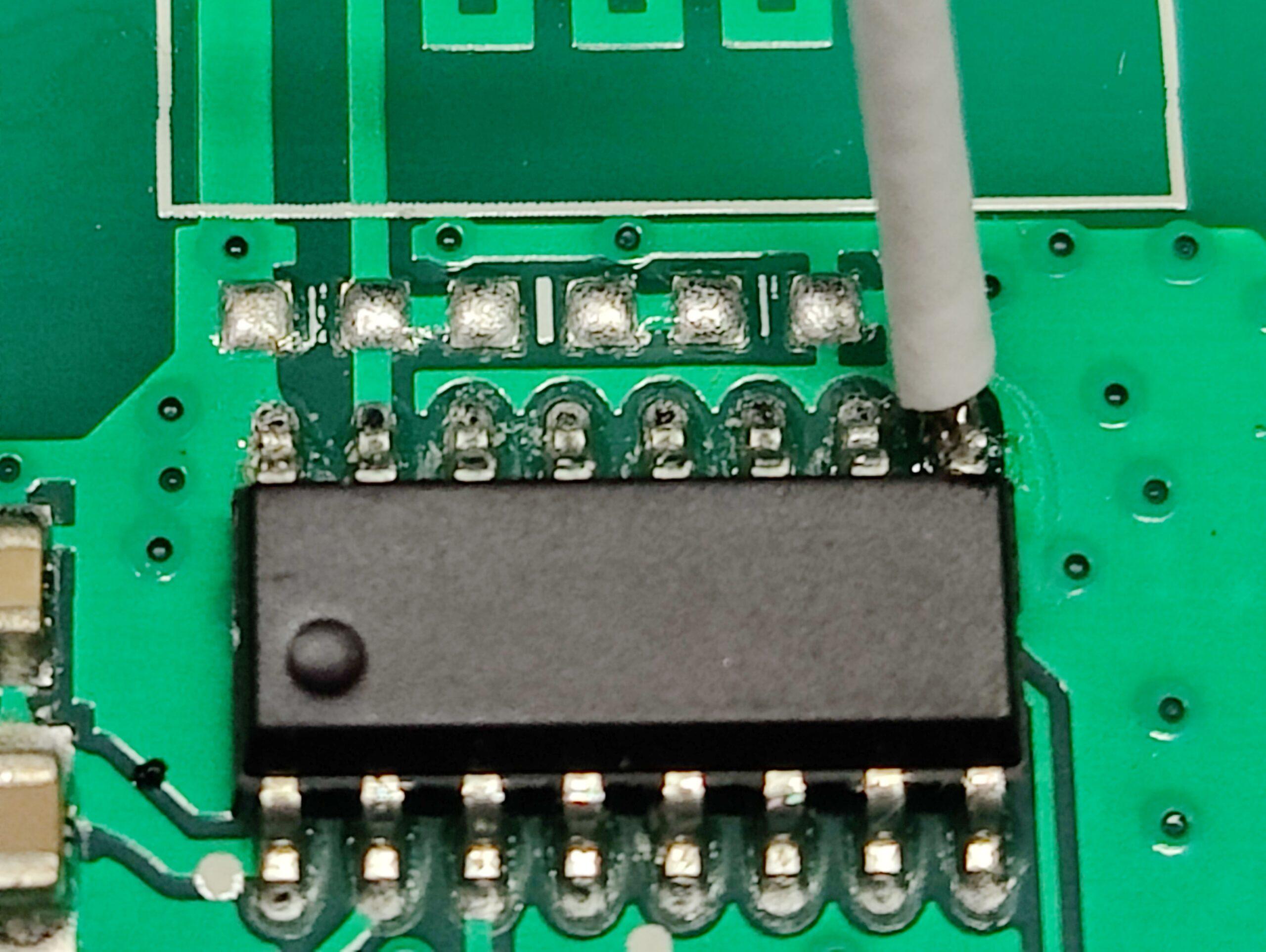
“Debug” wires on the RX/TX and on the RF chip
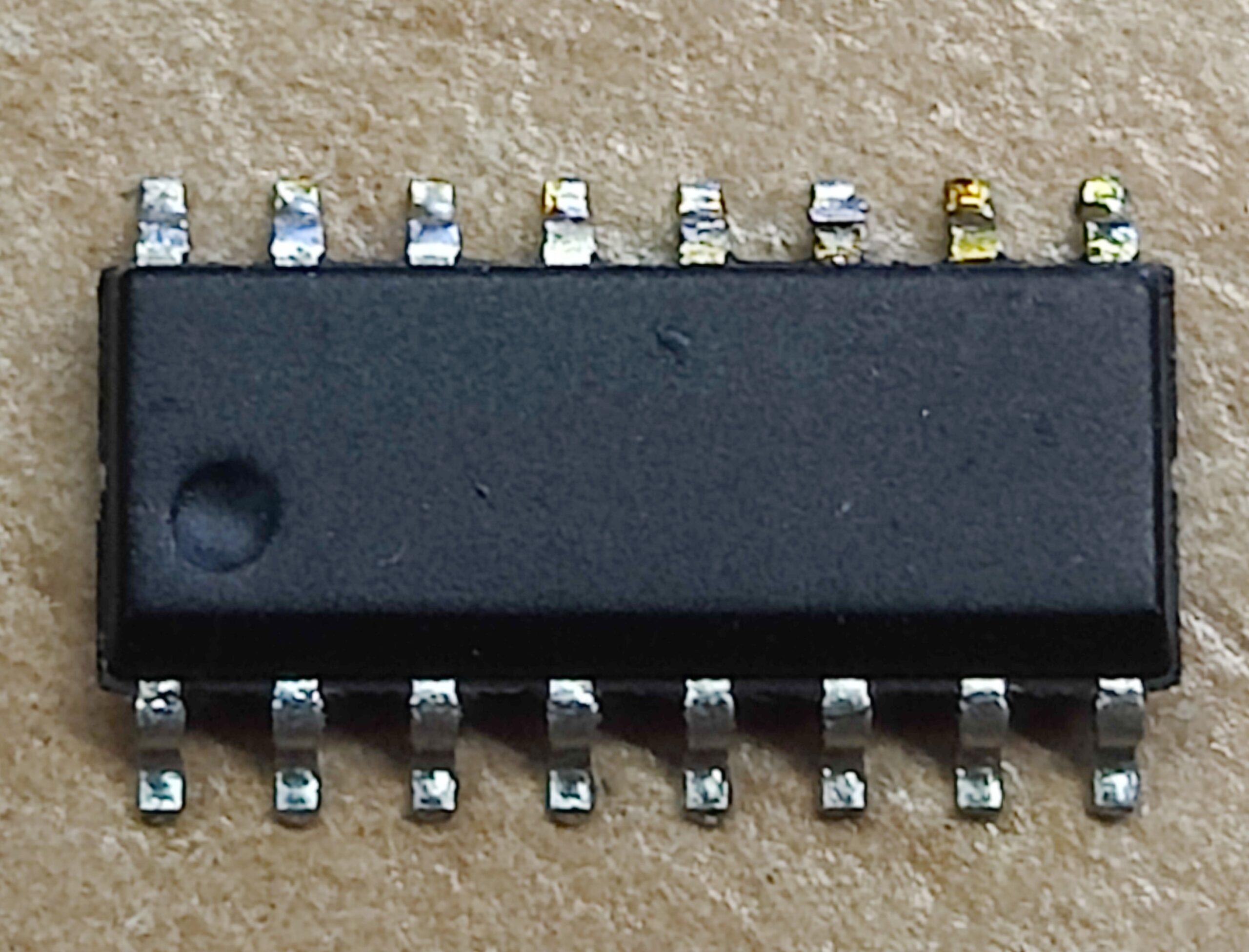
So this does not take us any further. In the next step, we looked at where the control signals of the radio remote control come from and how they are subsequently implemented. The RF receiver chip has 16 pins and unfortunately no labeling. Or has it been removed? The supply voltage of the RF chip is connected to pin 1 and pin 16, pin 2 and pin 3 are connected to a crystal and a line is routed from pin 9 to the microcontroller. So this must be the data output. Using the “PulseView” software from Sigrok and a Far East logic analyzer, we sniffed this output. And lo and behold, data packets with a duration of 10.3ms were revealed here. The PulseView software was able to recognize the protocol as an RS232 protocol after a few attempts with different analyzed data rates. It was then easy to log the received and decoded control commands to the microcontroller.
RF chip with connected “sniffer” cable
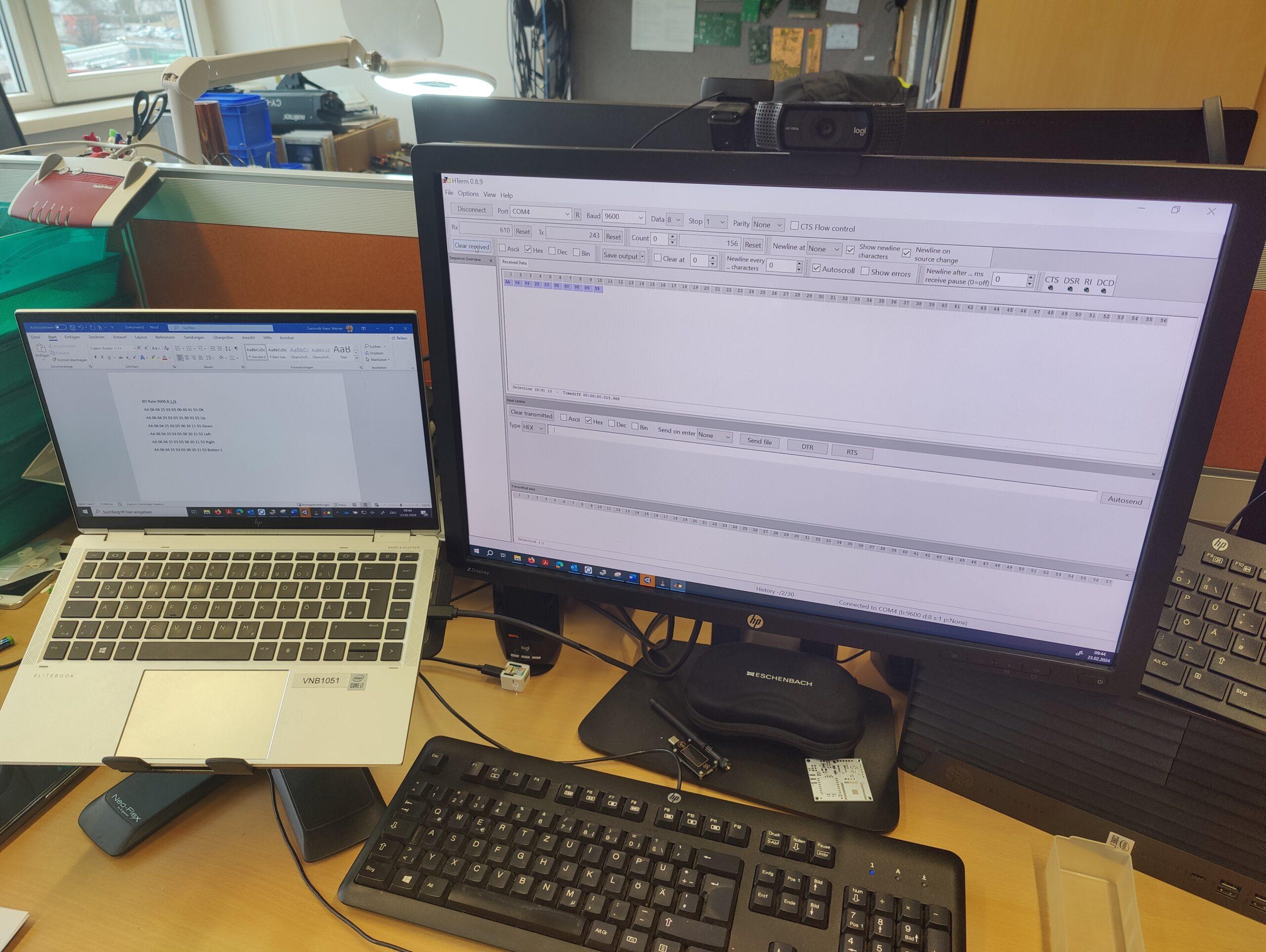
The baud rate of the RS232 port on the RF chip output is 9600 at 8N1. 10 bytes are received in HEX for each command sent. Here is the list of commands: (missing bytes follow…maybe sometime)
Befehl
Byte0
Byte1
Byte2
Byte3
Byte4
Byte5
Byte6
Byte7
Byte8
Byte9
UP
0xAA
0x06
0x04
0x25
0x03
0xD5
0x01
0x00
0x02
0x55
DOWN
0xAA
0x06
0x04
0x25
0x03
0xD5
0x00
0x10
0x11
0x55
LEFT
0xAA
0x06
0x04
0x25
0x03
0xD5
0x55
RIGHT
0xAA
0x06
0x04
0x25
0x03
0xD5
0x55
BUTTON1
0xAA
0x06
0x04
0x25
0x03
0xD5
0x55
BUTTON2
0xAA
0x06
0x04
0x25
0x03
0xD5
0x00
0x08
0x09
0x55
MEM1
0xAA
0x06
0x04
0x25
0x03
0xD5
0x55
MEM2
0xAA
0x06
0x04
0x25
0x03
0xD5
0x55
OK
0xAA
0x06
0x04
0x25
0x03
0xD5
0x00
0x40
0x41
0x55
SET
xx
xx
xx
xx
xx
xx
xx
xx
xx
xx
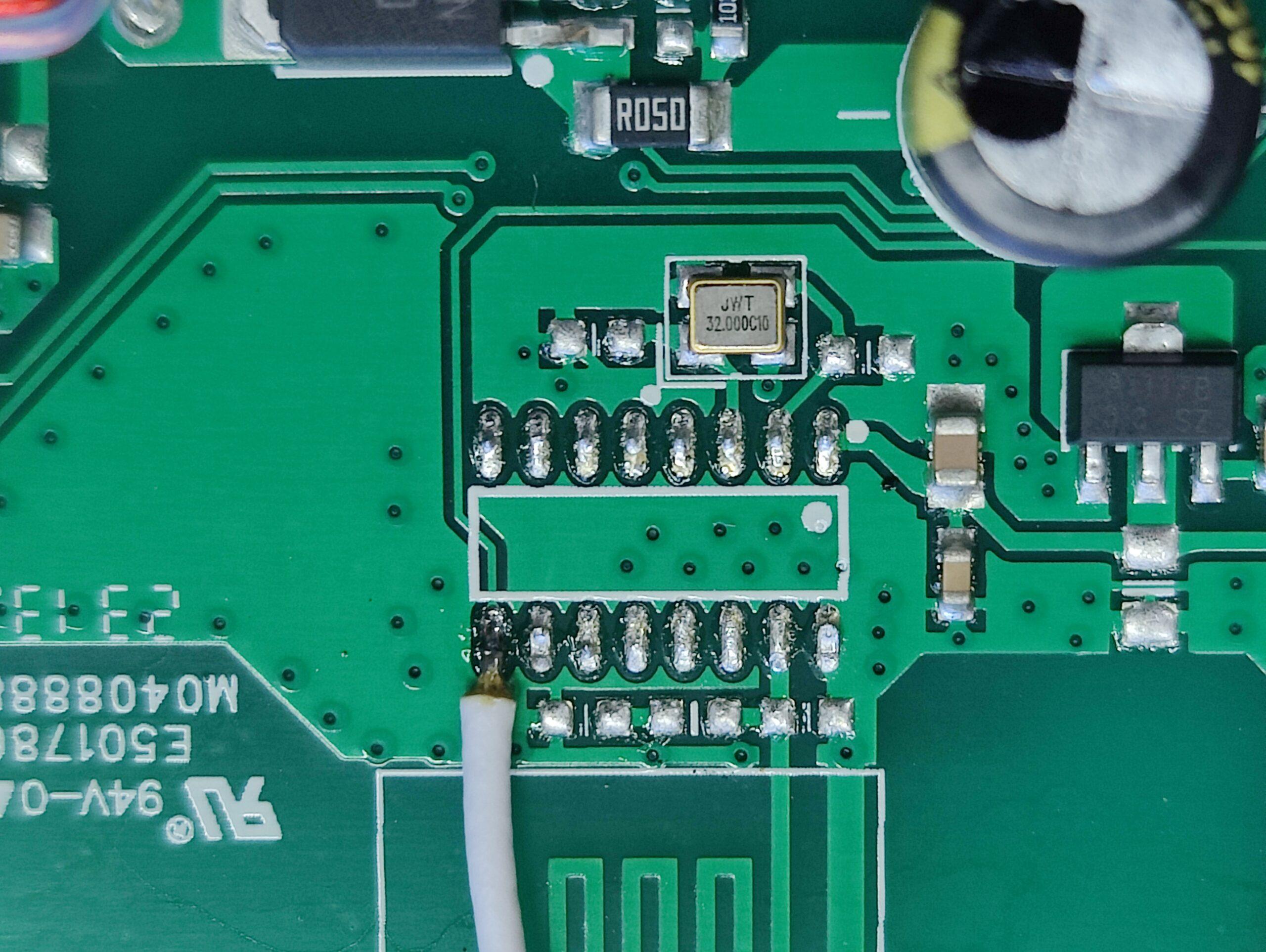
Once the data protocol had been found using the logic analyzer, we tried to send the data to the microcontroller using a terminal program and a USB to TTL232 converter. The RF chip was removed for this purpose. It pulled the level to VCC in the idle state and prevented parallel operation of the “RS232 transmitter”.
RF-Chip removedBoard without chip with debug line
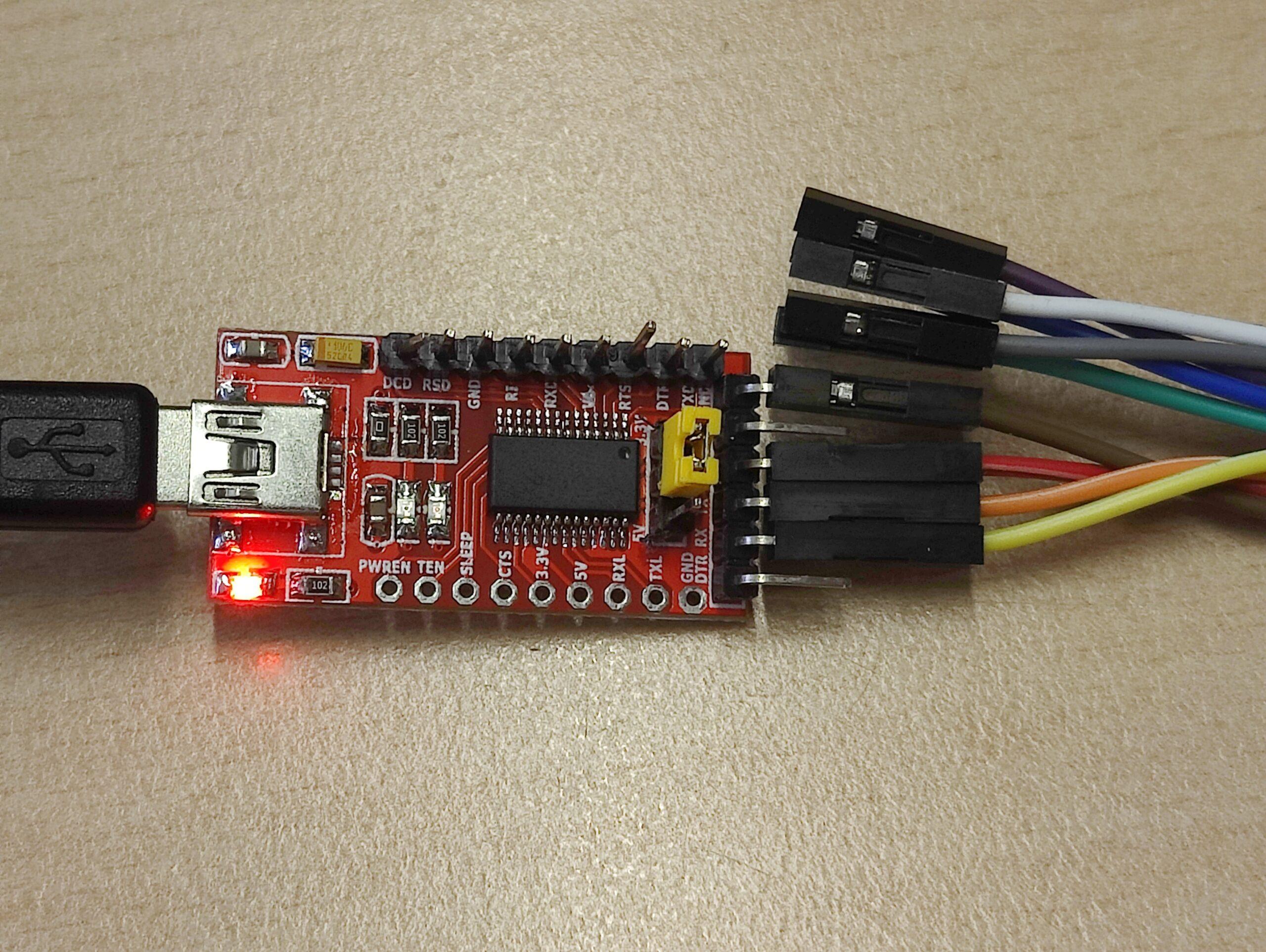
USB UART for sending commands
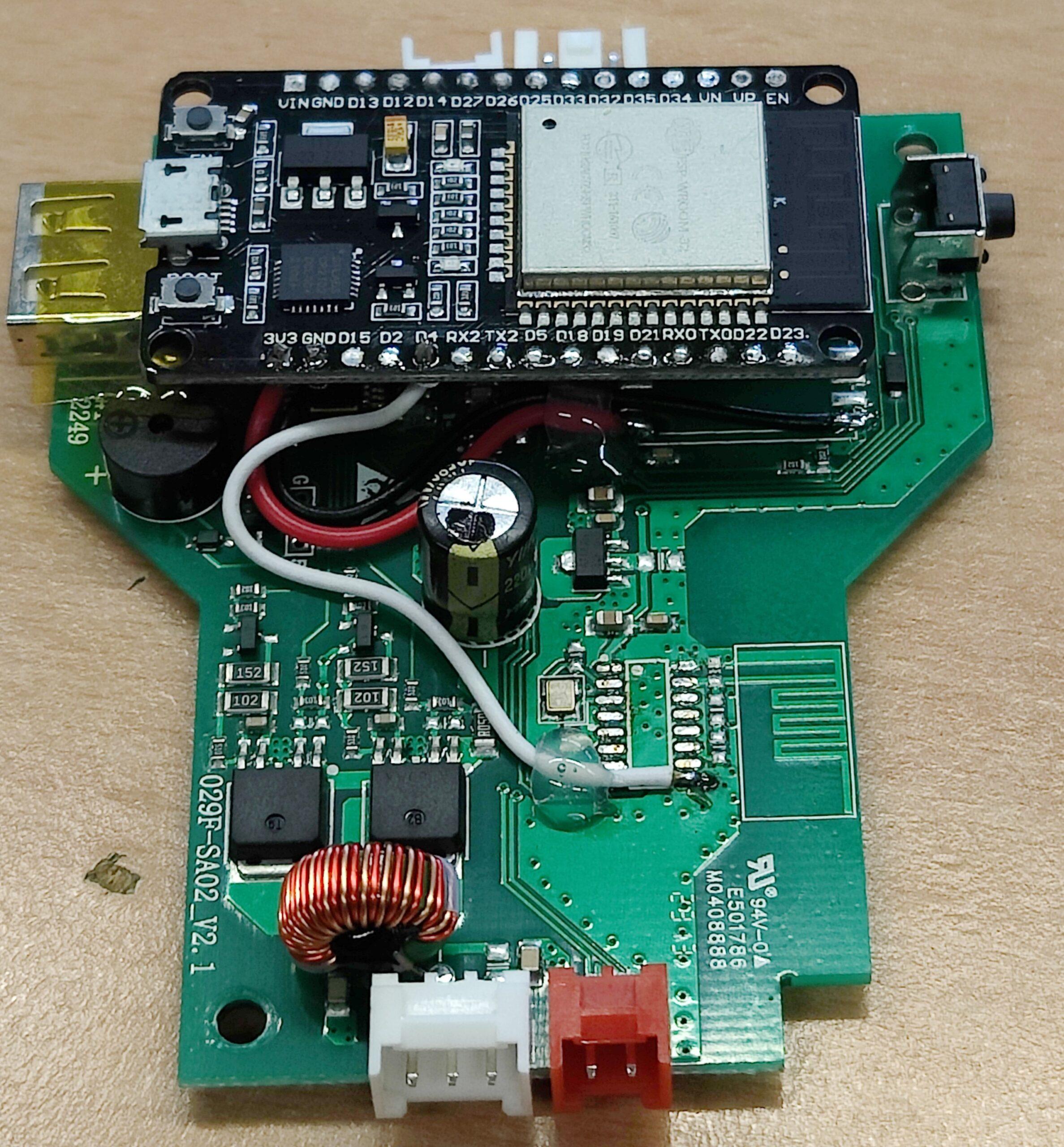
The control commands from the table above could be successfully sent via the terminal program. Now only an ESP32 board had to take over this task. An ESP32 NodeMCU board from the pool was equipped with a basic ESPHome image and integrated into the Homeassistant network. The ESPHome node now only had to be taught to send the byte sequence via the TX pin of the ESP32 when the corresponding trigger was activated in the Homeassistant. To do this, the ESP32 board was attached to the PCB and the VCC3V3, GND and TX lines were soldered to PIN9 of the former RF chip.
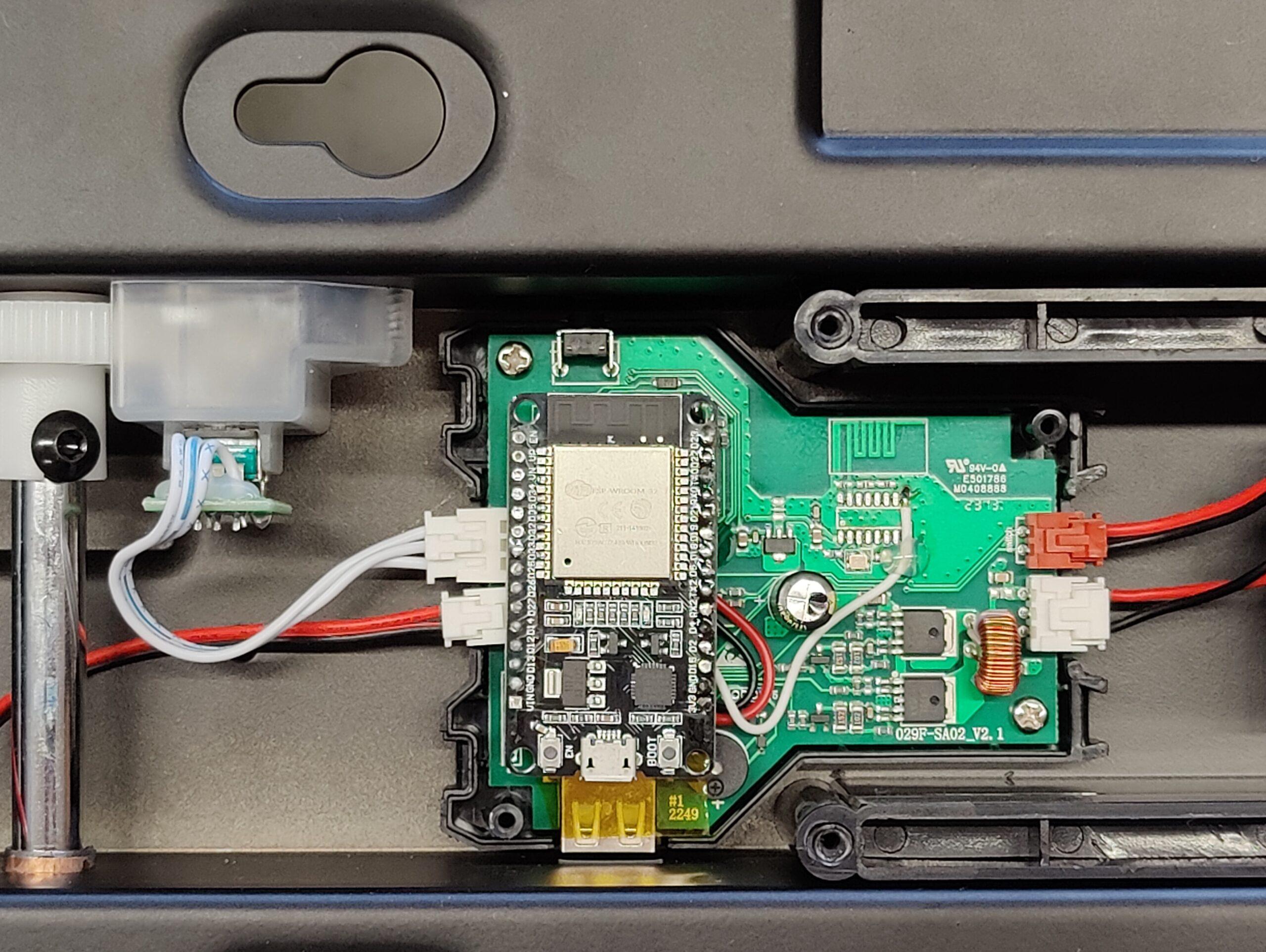
ESP32 on the board of the Speaka ceiling bracket
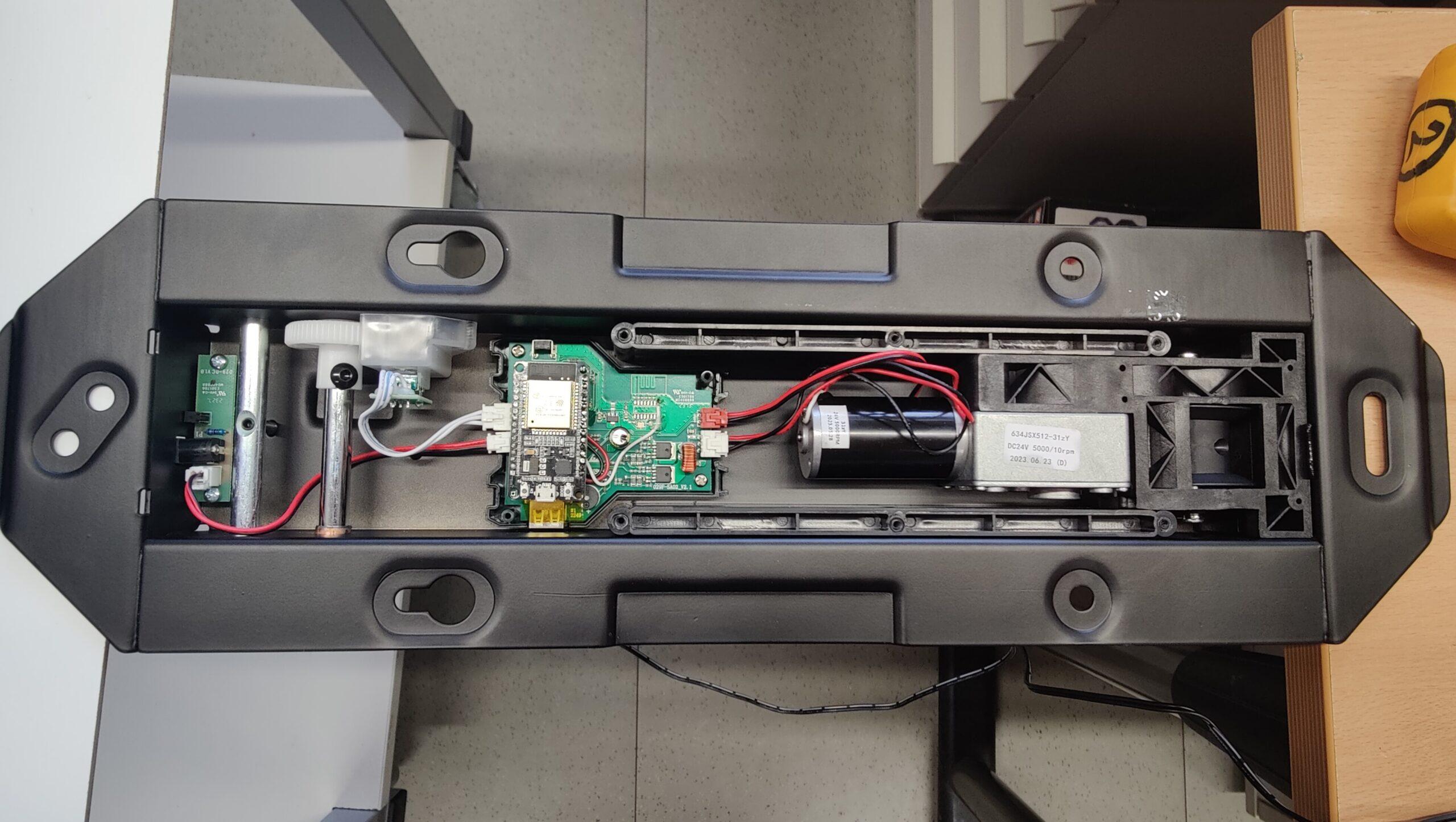
Re-installed in the ceiling bracket
The following esphome script must now be added to the ESPHome web environment.
esphome:
name: tvhalterung
friendly_name: TVHalterung
esp32:
board: esp32dev
framework:
type: arduino
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: "hier dein key beim Anlegen des device"
ota:
password: "hier dein ota password"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Tvhalterung Fallback Hotspot"
password: "hier wieder deins"
captive_portal:
uart:
tx_pin: 4
rx_pin: 5
baud_rate: 9600
# Example button configuration
button:
- platform: template
name: TV Halterung UP
id: tv_up
icon: "mdi:arrow-up-bold-outline"
on_press:
- logger.log: "Button pressed TV Up"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x01,0x00,0x02,0x55]
- platform: template
name: TV Halterung OK
id: tv_ok
icon: "mdi:stop-circle-outline"
on_press:
- logger.log: "Button pressed TV OK"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x00,0x40,0x41,0x55]
- platform: template
name: TV Halterung DOWN
id: tv_down
icon: "mdi:arrow-down-bold-outline"
on_press:
- logger.log: "Button pressed TV Down"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x00,0x10,0x11,0x55]
- platform: template
name: TV Halterung Button1
id: tv_button1
icon: "mdi:numeric-1-circle-outline"
on_press:
- logger.log: "Button pressed TV Button1"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x00,0x20,0x21,0x55]
- platform: template
name: TV Halterung Button2
id: tv_button2
icon: "mdi:numeric-2-circle-outline"
on_press:
- logger.log: "Button pressed TV Button2"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x00,0x08,0x09,0x55]
- platform: template
name: TV Halterung Left
id: tv_left
icon: "mdi:arrow-left-bold-outline"
on_press:
- logger.log: "Button pressed TV Left"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x00,0x20,0x21,0x55]
- platform: template
name: TV Halterung Right
id: tv_right
icon: "mdi:arrow-right-bold-outline"
on_press:
- logger.log: "Button pressed TV Right"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x00,0x20,0x21,0x55]
- platform: template
name: TV Halterung MEM1
id: tv_mem1
icon: "mdi:alpha-m-circle-outline"
on_press:
- logger.log: "Button pressed TV MEM1"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x00,0x01,0x02,0x55]
- platform: template
name: TV Halterung MEM2
id: tv_mem2
icon: "mdi:alpha-m-circle-outline"
on_press:
- logger.log: "Button pressed TV MEM2"
- uart.write: [0xAA,0x06,0x04,0x25,0x03,0xD5,0x00,0x01,0x02,0x55]
Once the esphomescript has been compiled and uploaded to the ESP, there is a new ESPHome device with the name TV holder in the Home Assistant environment. The buttons for the control are now listed here as entities. If everything went well, you should now be able to control the TV mount via the Home Assistant.
(Not all control commands have been implemented correctly yet – the correct codes will be added to the table)
In the article “Pylontech PV battery status in HomeAssistant”, I had improved the project “Pylontech battery monitoring” of the following GitHub links and drew a circuit board to make the whole construct a little more compact and professional. https://github.com/irekzielinski/Pylontech-Battery-Monitoring https://github.com/hidaba/PylontechMonitoring
All battery data of the Pylontech battery modules are displayed in the Homeassistant. Great! But when I take a look at the list of devices registered in my wifi networks, I almost feel sick – there are now far too many wireless devices, especially from the smart home sector, sharing the channel bandwidth. So my current plan is to bring some of the smart home devices onto the wired LAN network.
The self-made devices based on the ESPs are ideal for this. These are devices such as the OpenDTU interface, the EVU smart home interface or, as here, the interface from the serial console of the Pylontech battery to the MQTT server in the Home Assistant.
I have done some tests with boards such as the OLIMEX ESP32-PoE and the WT32-ETH01. The Olimex board would have the great advantage of also being able to be supplied with power via PoE. However, the power supply for PoE operation is so “poor” that the required standards of external boards are not met. Here I can mention the NRF24L01 radio module, for example. I did some tests with it and decided to disregard the PoE functionality for the time being. This led to the plan to use the WT32-ETH01 with an ESP32 to design a universal board with several interfaces. It should be able to do the following:
communicate with the PV inverters using OpenDTU and NRF24L01
communicate with the Smarthome system via the Pylontech Console using MQTT
have an optional CAN interface
be able to communicate via RS422/RS485 in addition to the RS232 interface
receive the power supply via 5V USB
and to have everything packed nicely small and compact in one housing
So I designed a circuit and drew a circuit board. I got the boards manufactured by a Far East PCB manufacturer. The assembly is also done quickly.
Circuit diagram of the Universal Lan Interface
The picture below shows the PCB layout before production.
The WT32-ETH01 board does not have a USB port for programming the controller. It is programmed via an external USB-UART adapter. To activate the programming mode, an IO pin must also be connected to GND. To simplify this somewhat, there is now a “PROG” jumper on the board. If this jumper is plugged in, the WT32 can receive the firmware files. I have provided a pin header slot “TO-FTDI” as a connection option for the USB-UART adapter.
The board is now designed that it can be used to operate different devices. If you connect an NRF24L01 module to the “NRF24L01+” pin header and flash the ESP32-OpenDTU image to the controller, the inverter data can be received and transmitted via the LAN network. I have created a suitable IO-config jason-file for the use of the WT32.
Another application is the use of the board with the serial output of the battery data of the Pylontech PV batteries. The batteries provide a “Console” port which represents an RS232 interface. The data is transferred to the WT32 controller via this port and is then available via LAN in the local network.
I have adapted the ESP8266 script from hidaba and irekzielinski for the ESP32 controller. (see code at the end of the article)
Once the code has been compiled and uploaded, the status of the Pylontec batteries should be visible under the set IP address after all connections have been made.
Board version with Pylontech setupVersion with OpenDTU and NRF24L01 setup
The device setups shown in the picture are equipped with a housing. I have published the “.stl” files created with FreeCad on thingiverse.