
Pylontech PV battery status in the HomeAssistant
![]()
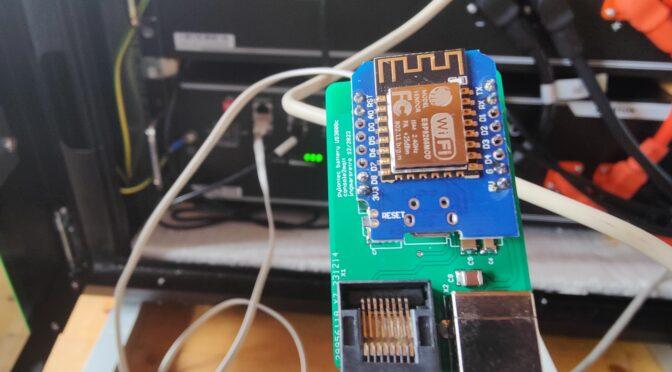
Anyone who has installed a photovoltaic system in their own home may even use an energy storage system. In this example, it is an off-grid system equipped with two modules from the manufacturer Pylontech. The Pylontech US3000C batteries have an output voltage of 48V. The nominal capacity is 3500Wh. The installed cells are LiFePO4 cells…
Read more


Recent Comments