

LAN for Pylontech PV-batterystatus, OpenDTU and more in HomeAssistant
![]()
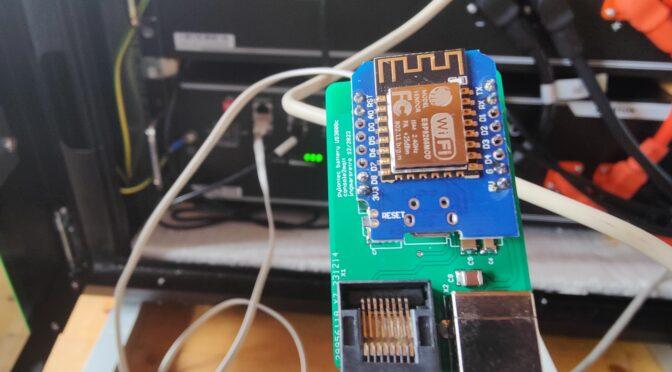
In the article “Pylontech PV battery status in HomeAssistant”, I had improved the project “Pylontech battery monitoring” of the following GitHub links and drew a circuit board to make the whole construct a little more compact and professional. https://github.com/irekzielinski/Pylontech-Battery-Monitoring https://github.com/hidaba/PylontechMonitoring All battery data of the Pylontech battery modules are displayed in the Homeassistant. Great! But…
Read more


Recent Comments