
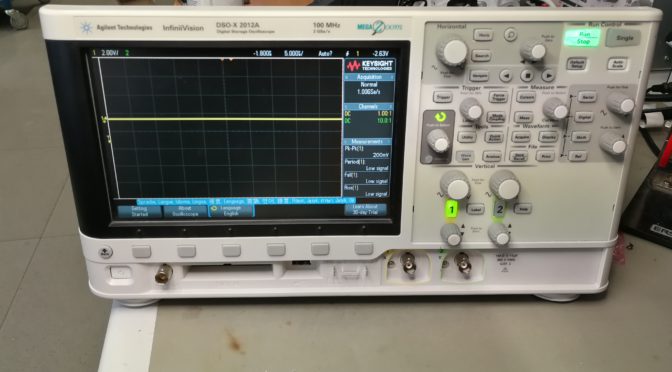
Keysight oscilloscope dies in standby – power supply repair
![]()
An interesting problem has arisen with the measurement technology in the laboratories at my workplace. I use the term “measurement technology” to describe the equipment of a laboratory workstation for basic training. There are a total of nineteen laboratory workstations, each equipped with two laboratory power supplies, two desktop multimeters, a Keysight signal generator and…
Read more








Recent Comments