
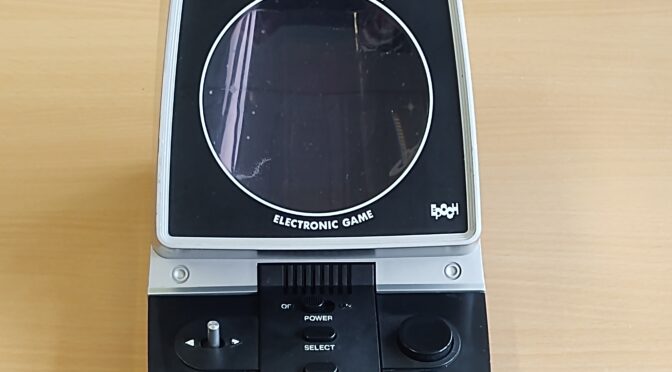
Tabletop game console Galaxy II
![]()
“ASTRO WARS” or “GALAXY II” is the name of the table top game console that I am introducing here. It is the home version of the arcade game “Galaxian”, which was implemented as a small tabletop device for everyone at home. The manufacturer was Epoch, which sold the device in 1981. There was also a…
Read more





Recent Comments