![]()

Ein alter Begleiter im Bereich Messgeräte ist das Tischmultimeter von Keithley. In unseren Labors werden vorwiegend die Typen der 2000er Serie eingesetzt. Es gibt sie in unterschiedlichen Ausstattungsvarianten betreffend der Schnittstellen zur Außenwelt. Hier ist GBIP-Bus natürlich ein Standard, ebenso wie RS232. Die neueren Geräte besitzen mittlerweile ein LAN Interface mit dem eine Kommunikation über das Internet Protokoll möglich ist. Über jede dieser Schnittstellen kann über „Standard Commands for Programmable Instruments“ (SCPI) mit dem Gerät kommuniziert werden. In diesem Beispiel werde ich das Keithley 2000 über Matlab ansteuern und zyklisch über einen längeren Zeitraum Messwerte auslesen, diese in Matlab speichern und schlussendlich in einem Plot ausgeben – quasi einen simplen Datalogger konfigurieren. Der Zweck dieses Aufbaus ist es, den Spannungsverlauf (bzw. auch Strom) eines Akkus bzw. Batterie eines Low-Energie Device zu erfassen.


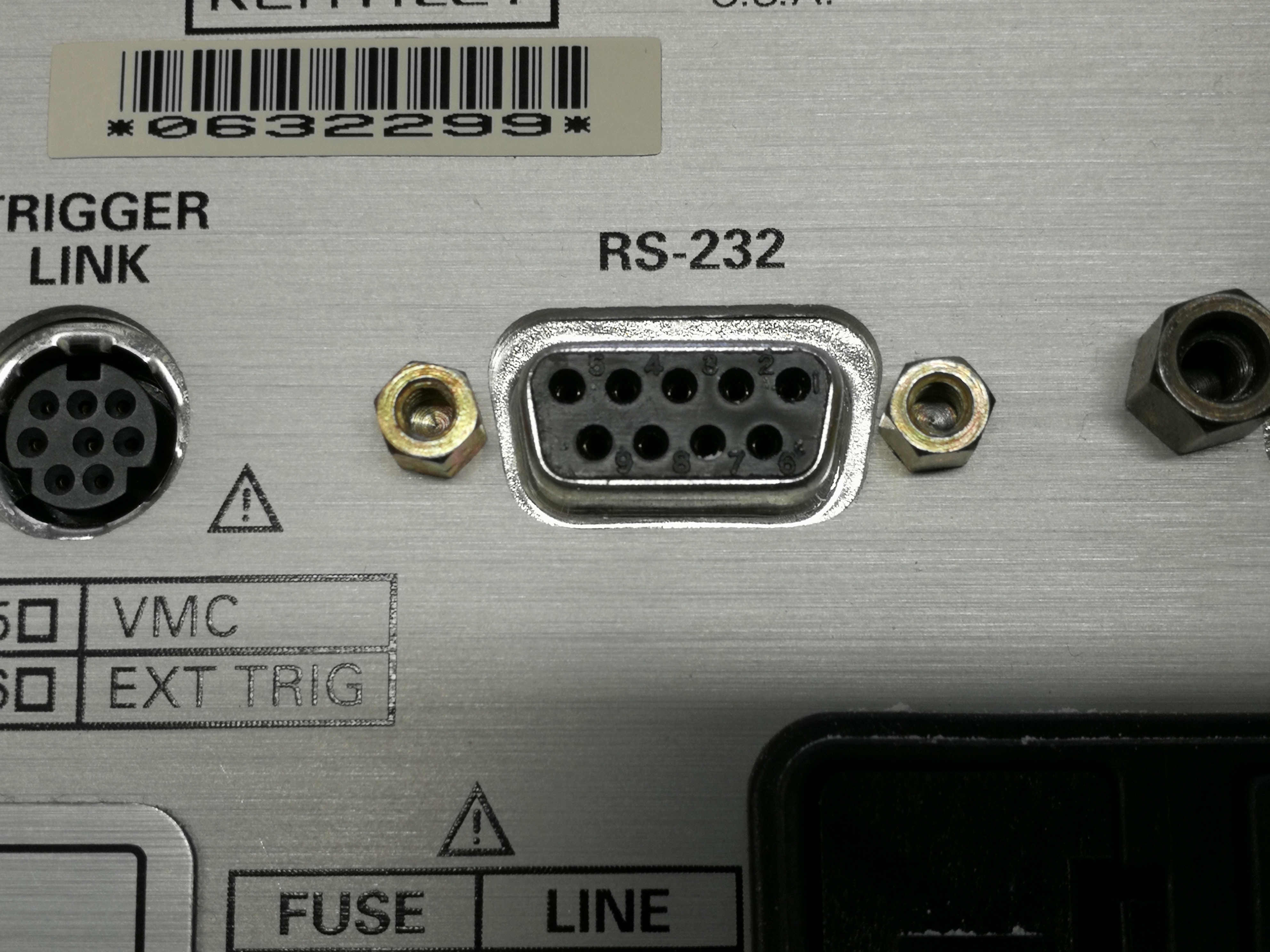
In diesem Beispiel werde ich die serielle Datenübertragung per klassischer RS232 Schnittstelle verwenden, da diese für meine Anwendung vollkommen ausreicht. Zudem kann ich mir die Installation der Treiberpakete für das GPIP-USB Interface ersparen. 🙂 Da viele der aktuellen Rechner und Laptops auch keine RS232 Ports mehr haben, muss ein USB-RS232 Adapter (beispielsweise FTDI232 etc.) her.

Ist die Verbindung zwischen dem Multimeter und dem Rechner hergestellt, kann, wie in diesem Beispiel, über ein Matlabskript kommuniziert werden. Dem Keithley muss nur mehr mitgeteilt werden, dass es über die serielle Schnittstelle „sprechen“ soll. Die folgenden Code-Schnipsel zeigen, wie man einfach über SCPI Daten auslesen kann:
serialObject = instrfind('Type', 'serial', 'Port', 'COM26', 'Tag', '');
%serialPort = 'COM23';
%serialObject = serial(serialPort,'BaudRate',9600, 'DataBits',8);
if isempty(serialObject)
serialObject = serial('COM26','BaudRate',57600, 'DataBits',8);
else
fclose(serialObject);
serialObject = serialObject(1)
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
% Sourcemeter 2000 setup
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
fopen(serialObject)
% fprintf(serialObject,':*RST')
time = now;
voltage = 0;
%%
figureinstanz = figure('NumberTitle','off',...
'Name','Spannungslogg',...
'Color',[0 0 0],'Visible','off');
plotinstanz = plot(voltage,time,'Color','red');
%% Messzeit und evtl Messintervall
stoptime = 10; %60 seconds
timeInterval = 1; % brauch' ma jetzt nicht
% Messgeraet einstellen
fprintf(serialObject,':SOUR:FUNC:MODE CURR'); % current source selection.
fprintf(serialObject,':SOUR:CURR:MODE FIXED'); % changes voltage mode to fixed
fprintf(serialObject,':SOUR:CURR:LEV 0'); % sets current to 0
fprintf(serialObject,':SENS:FUNC "VOLT"');
fprintf(serialObject,':SENS:VOLT:PROT 4');
%fprintf(serialObject,':SENS:CURR:RANG:AUTO ON');
fprintf(serialObject,':SENS:VOLT:RANG 10');
fprintf(serialObject,':FORM:ELEM VOLT');
% %fprintf(serialObject,':TRAC:COUN 1');
% %fprintf(serialObject,':TRAC:FEED:CONT NEV');
%
%
% fprintf(serialObject,':TRAC:CLE');
%
% fprintf(serialObject,':TRAC:POIN 10');
% fprintf(serialObject,'TRAC:FEED:SENS');
% fprintf(serialObject,'TRAC:FEED:CONT NECT');
% fprintf(serialObject,'TRIG:COUN 10');
% fprintf(serialObject,':OUTP ON');
%
% fprintf(serialObject,':INIT');
% fprintf(serialObject,':TRACE:DATA?');
%% Daten abholen
count = 1; voltage(1)=4
tic;
time=toc;
% while time<=stoptime
while voltage>=1.5
% fprintf(serialObject,':INIT');
% fprintf(serialObject,':TRAC:FEED SENS');
% fprintf(serialObject,':TRAC:DATA?');
%
fprintf(serialObject,':READ?');
voltage(count) = fscanf(serialObject,'%f');
time(count) = toc;
set(plotinstanz,'YData',voltage,'XData',time);
set(figureinstanz,'Visible','on');
pause(timeInterval);
count = count +1;
end
figure(1);
plot(time,voltage);
grid on; hold on;
xlabel('Zeit [s]'); ylabel('Batteriespannung [V]')
title('Spannungsverlauf Batterie 3V Lithium (2032 mit Modul) im default mode');
% fprintf(serialObject,':OUTP OFF');
%% Put the instrument in local mode
fprintf(serialObject,'SYSTEM:LOCAL');
fclose(serialObject);
Wie so ein Datalog dann aussieht, ist in der folgenden Grafik dargestellt. Hier ist der Spannungsverlauf einer nahezu entladenen Batterie bis zum Abschalten des Verbrauchers über die Zeit aufgezeichnet worden.