
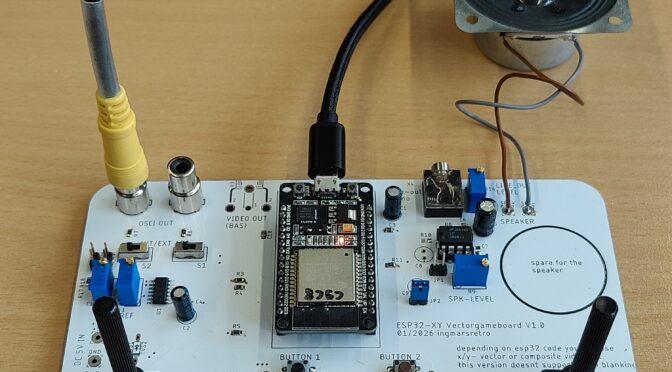
ESP32 Video Pong – Retrogaming trifft moderne Mikrocontroller-Technik
![]()
13. Februar 2026 | ingmarsretro Es ist schon eine Weile her, dass ich mir Zeit genommen habe, über eines meiner letzten Projekte zu berichten. Diesmal geht es um ein Thema, das zwei meiner großen Leidenschaften vereint: Die Faszination für Retro-Gaming aus meiner Jugend und die Möglichkeiten moderner Mikrocontroller-Technik. Wer in den 1970er Jahren aufgewachsen ist,…
Weiterlesen










Recent Comments