
IR-Thermokamera an Raspberry PI
![]()
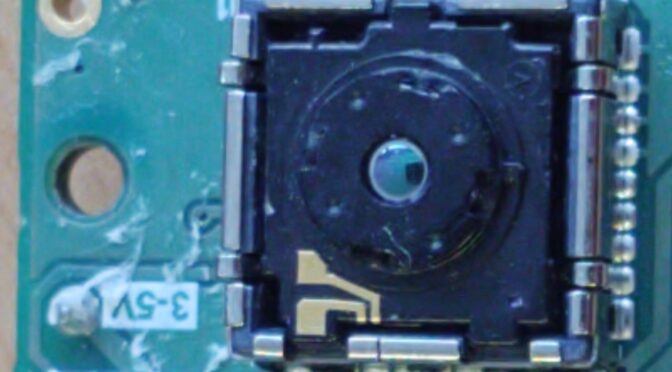
Ein vielleicht interessantes kleines Projekt ist, ein Lepton Kameramodul mit einem Raspberry zu betreiben. In meinem Fall verwende ich ein Lepton Modul mit 80×60 Pixeln bei einer Pixelgröße von 17µm und einer spektralen Empfindlichkeit im langwelligen Infrarot Bereich von 8µm bis 14µm. Die Framerate beträgt maximal 8,6 Hz. Das Kameramodul wird in ein Breakout-Board gesteckt…
Weiterlesen


Recent Comments