Immer wieder halte ich Ausschau nach einfachen, interessanten Dingen. Dieses Mal hat mich ein Messgerät- oder eher „Anzeigegerät“ fasziniert, dessen Funktionsprinzip äußert einfach und doch sehr effektiv ist. Zudem ist es aus meiner Sicht auch noch ein Hingucker – Es handelt sich um das so genannte Goethe-Barometer. Die bekannteste Form ist wohl das an der Wand hängende, bauchige Glas mit einem Schnabel, ähnlich einer Gießkanne, in dem der Wasserstand den Luftdruck anzeigt. Eine etwas anders konstruierte Version dieses Glases habe ich im Netz gefunden…
Ein wenig zur Geschichte dieses Aufbaues:
Einem Herrn namens Evangelista Toricelli (1608-1647), einem italienischen Physiker und Mathematiker verdanken wir die Erkenntnis und den Nachweis, dass der Luftdruck Schwankungen unterliegt. Er baute 1643 das erste nach ihm benannte Barometer. 1644 entwickelte er das Quecksilberthermometer.
Ein kleiner Ausgleichsbereich im Anzeigerohr schützt vor Überlauf
Der deutsche Dichter Johann Wolfgang Göthe, beschäftigte sich auch mit den Naturwissenschaften. Er machte selbst viele naturwissenschaftliche Experimente und entwickelte später ein einfaches, aber wirkungsvolles Barometer auf den Grundlagen des Toricelli.
Die Funktionsweise:
Das Barometer zeigt schnell und präzise Luftveränderungen an. Bei steigendem Luftdruck fällt die Wassersäule im Anzeigerohr und bei fallendem Luftdruck steigt sie. Möglich ist dies durch die im Glas eingeschlossene Luft. Das Volumen der Luft bleibt bei gleichbleibender Temperatur immer gleich. Steigt oder sinkt der äußere Luftdruck, so wird die eingeschlossene Luft über die Wassersäule zusammengedrückt oder eben ausgedehnt. Da sich das Wasser nicht komprimieren lässt, ist es das ideale Medium um die Druckunterschiede sichtbar zu machen. Die Höhe der Wassersäule zeigt somit den Luftdruck an. Ist der Luftdruck bei schönem Wetter hoch, so ist der Außendruck gegenüber dem Druck der eingeschlossenen Luft höher und die Wassersäule sinkt, da die eingeschlossene Luft verdichtet wird. Bei niedrigem Luftdruck kann sie sich ausdehnen und der Stand der Wassersäule steigt.
die Höhe des Wasserstandes im Rohr zeigt den Luftdruck an
Dieses kurze Zeitraffervideo zeigt die Änderung des Wasserstandes bei Luftdruckänderung:
Immer wieder fasziniert mich das Thema Radioaktivität. Genauer gesagt ist es das Messen oder Detektieren dieser ionisierenden Strahlung, die durch den Zerfall und von Atomkernen unter Abgabe von Energie entsteht. Dabei unterscheidet man prinzipiell die aus der Bewegung der zerfallenden Teilchen (also Teilchenstrahlung) ausgesandte Energie (Alpha- und Beta- Teilchen) und der Strahlungsenergie, die als elektromagnetische Welle transportiert wird (Gammastrahlung und auch Röntgenstrahlung). Diese Strahlungsarten haben unterschiedliche Energiedichten und Reichweiten. Je nach Art sind sie mehr oder weniger einfach abzuschirmen. Alphastrahlung ist eine Teilchenstrahlung, die von Materie (Luft, Wasser) stark abgebremst wird und ein Blatt Papier gar nicht mehr durchdringt. Allerdings geben diese Teilchen auf ihrer sehr kurzen Distanz die Energie ab. Das ist besonders gefährlich, wenn diese Partikel eingeatmet werden, oder an den oberen Hautschichten strahlen. Gammastrahlung wiederum durchdringt wie eine Funkwelle Materie sehr leicht und lässt sich am wirkungsvollsten mit Blei abschirmen. Das auch diese Strahlungsart alles andere als ungefährlich ist, braucht man wohl nicht zu erwähnen.
Diese Strahlung kann man nicht sehen, riechen, schmecken oder sonst irgendwie direkt wahrnehmen, aber die Gefährlichkeit ist trotzdem vorhanden. Mit relativ einfachen Techniken kann man diese Zerfallsprozesse aber sichtbar, bzw. hörbar machen und zählen.
Das bewerkstelligt man schon seit langem mit einem sogenannten Zählrohr oder dank der modernen Technik auch mittels Halbleiter. Ein P-N-Übergang wird in Sperrrichtung betrieben und unter Ausschluss von Licht (also abgedunkelt) der ganz kleine Sperrstrom gemessen. Trifft nun energiereiche Strahlung auf diesen P-N-Übergang dann wird der Stromfluss kurzzeitig erhöht und kann detektiert werden.
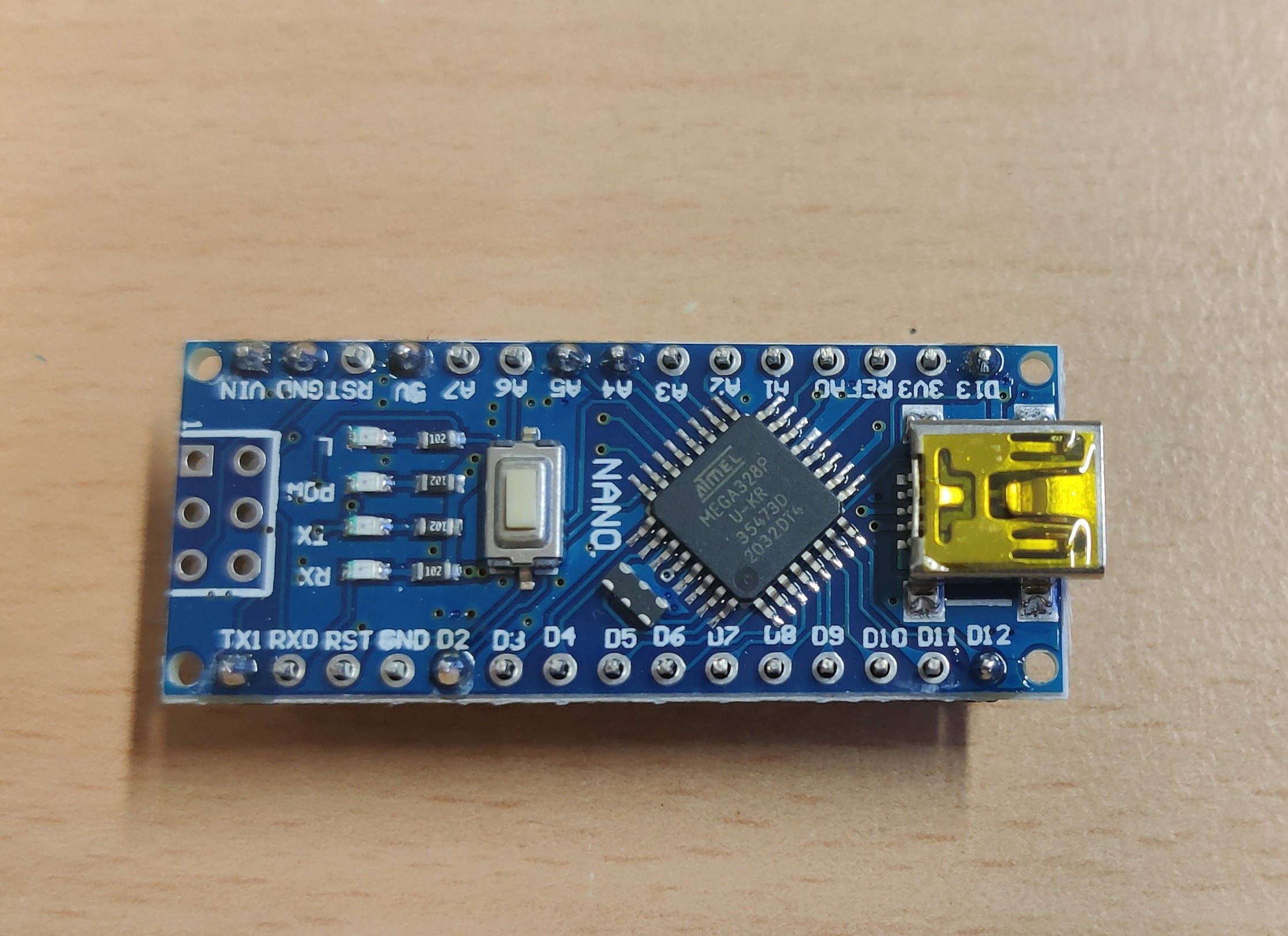
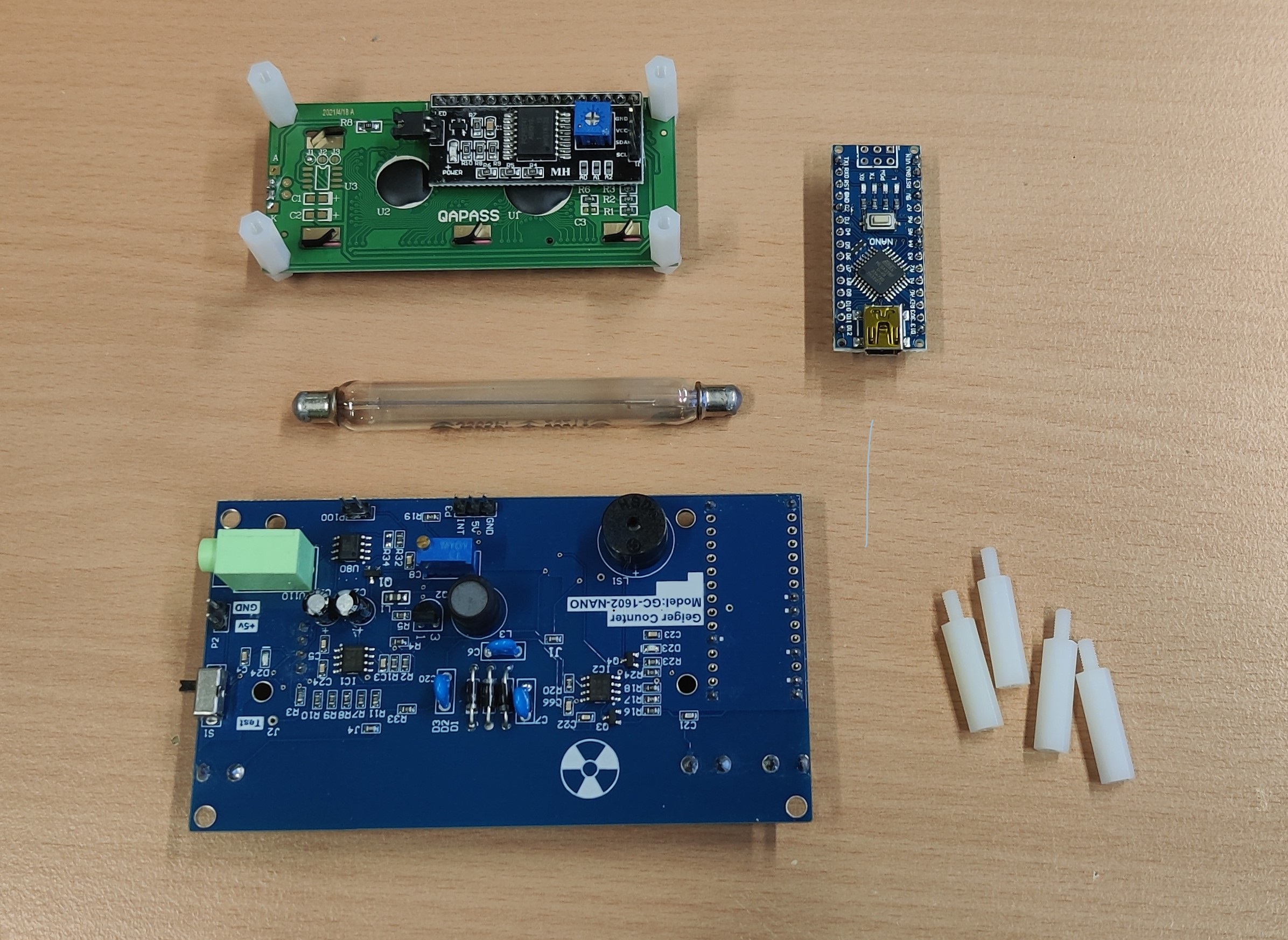
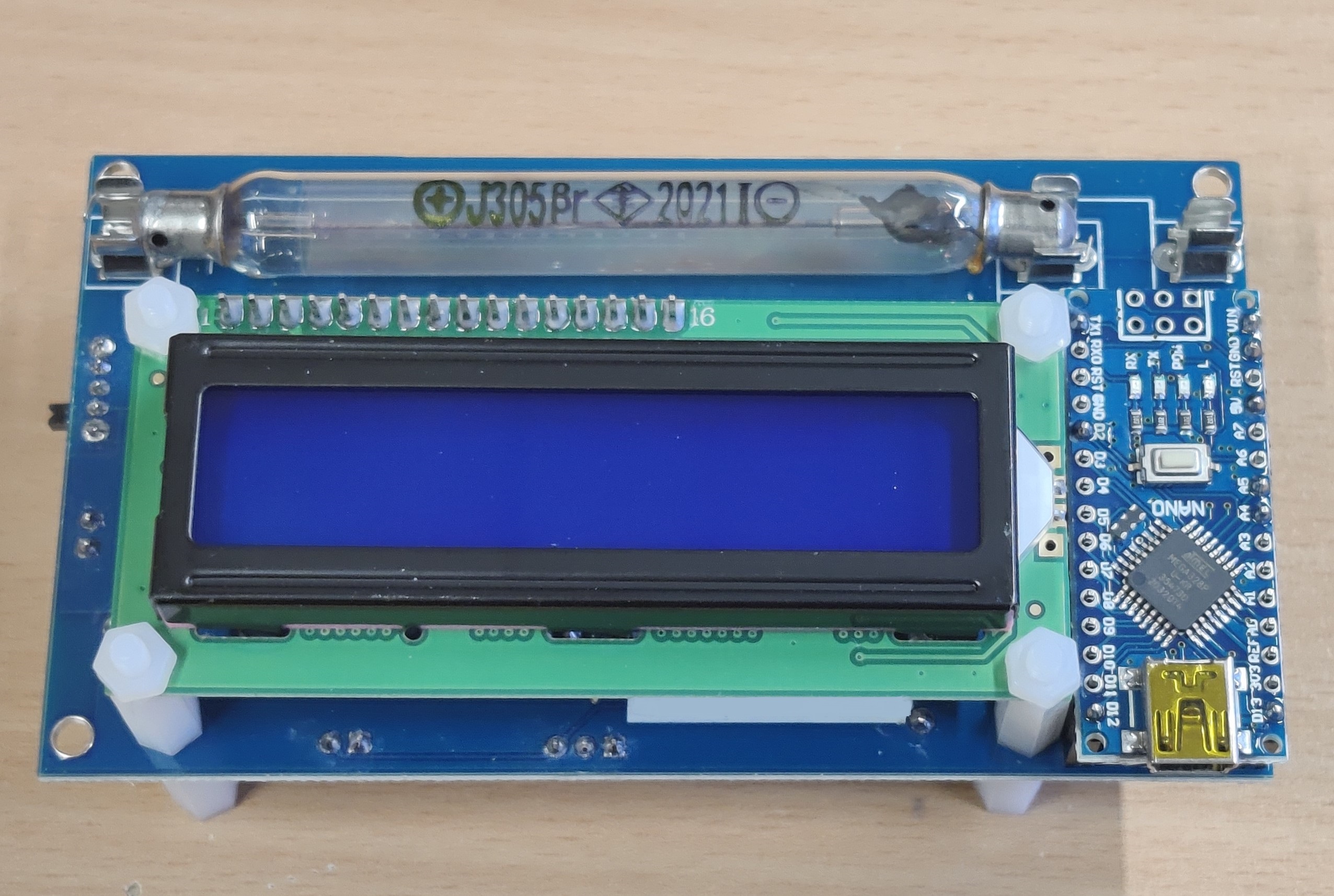
Immer wenn sich die Möglichkeit ergibt, sehr günstig zu einem Detektor zu kommen, greife ich natürlich zu. So auch dieses Mal. Einen einfachen Bausatz, basierend auf der Detektion mittels Zählrohrs musste ich mir ansehen. Der Bausatz stammt aus Fernost und besteht aus einer Basisplatine, einem aufgesteckten Arduino Nano und einem ebenfalls aufgesteckten LC-Display.
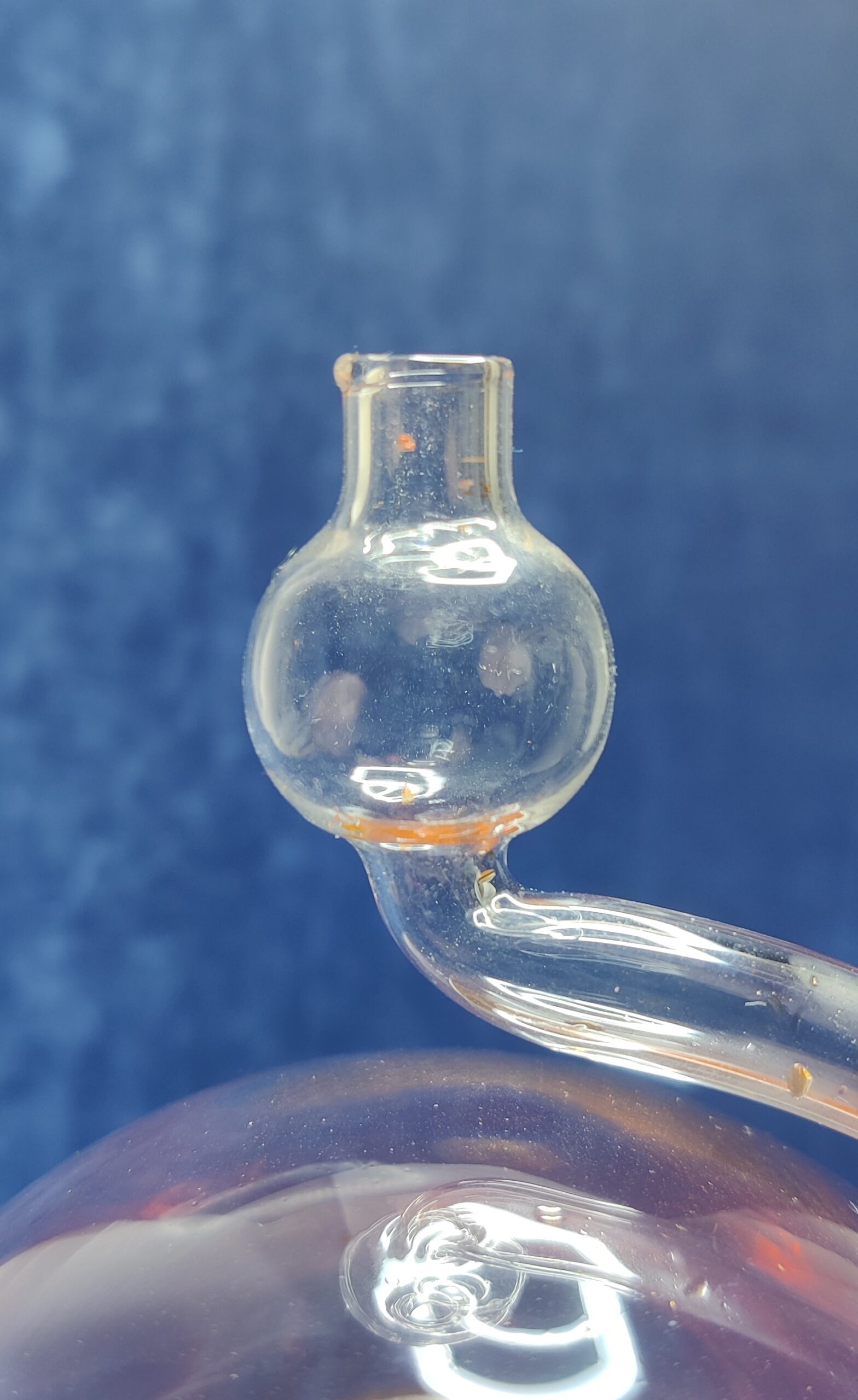
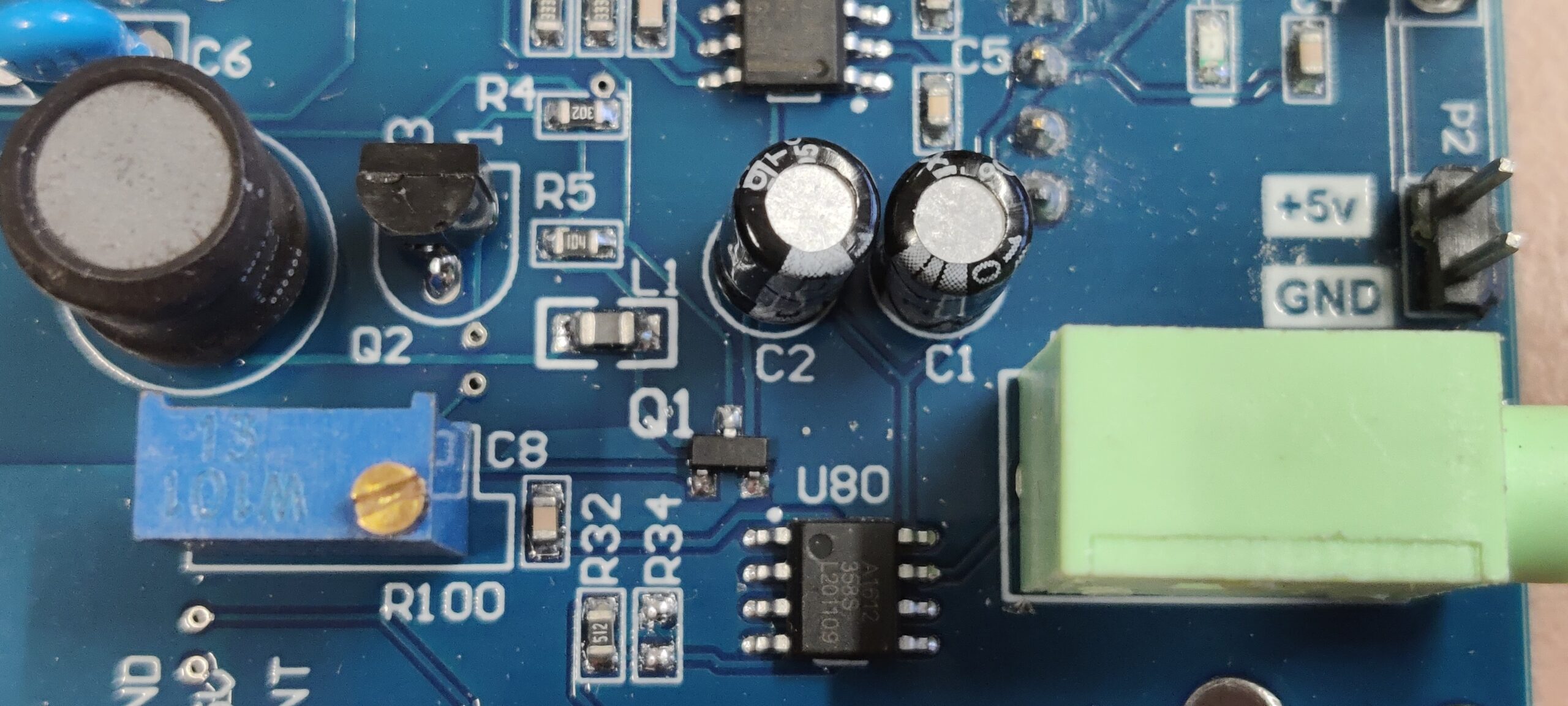
Alle für die Detektion notwendigen Komponenten befinden sich auf dem Mainboard. Dazu zählt unter anderem die Hochspannungserzeugung für das Zählrohr, die mittels einfacher Boost-Konverterschaltung, angetrieben von einem 555er, realisiert wird. Um das Zählrohr auf dem Mainboard zu befestigen hat der Designer dieses Boards einfache Glasrohrsicherungshalter gewählt. Die passen zwar nicht ganz exakt, lassen sich aber soweit ausdehnen, dass sie das Zählrohr gut festhalten. Das Zählrohr ist übrigens ein J305. Es ist ca. 90mm lang und hat einen Durchmesser von knapp einem Zentimeter.
Das Zählrohr arbeitet bei einer Anodenspannung von 350V bis 480V. Nachstehend habe ich die Spezifikationen aus dem Datenblatt aufgelistet:
Anodenspannung: 350 v bis 480 V
Typ: J305 Geiger-Zählrohr
Kathodenmaterial: Zinnoxid
Wandungsdichte: 50 ± 10 cg/cm²
Betriebstemperaturbereich: -40 °C bis 50 °C
Durchmesser: 10 mm (±0,5 mm)
Länge: 90 mm (±2 mm)
Eigenhintergrundstrahlung: 0,2 Impulse/s
Empfindlichkeit gegenüber γ-Strahlung: 0,1 MeV
Stromaufnahme: 0,015 mA bis 0,02 mA
Arbeitsspannung: 380 V bis 450 V
γ-Strahlung: 20mR/h ~ 120mR/h
β-Strahlung: 100 ~ 1800 Pulse/min.
100 ~ 1800 Pulse/min.
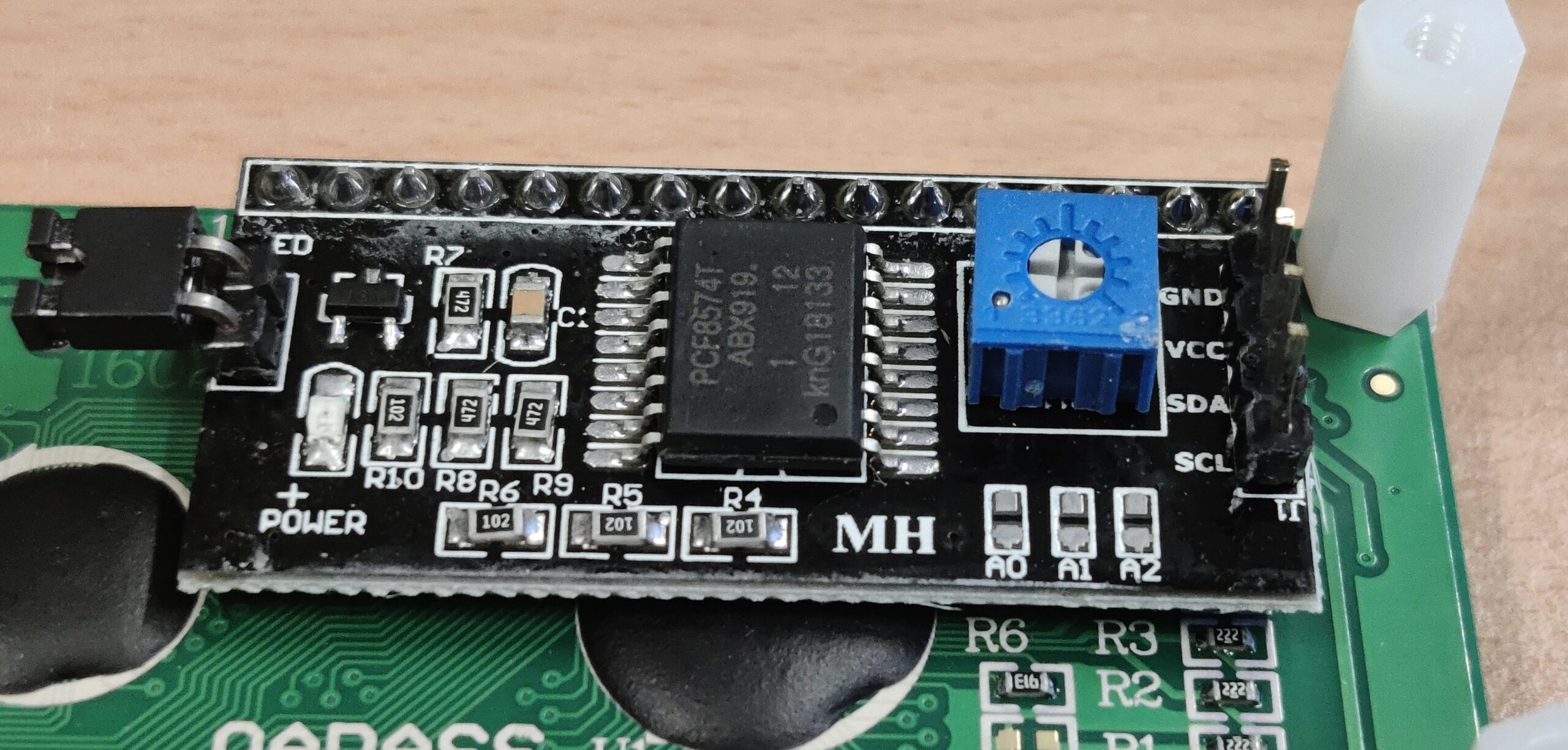
Die Signaldetektion sowie die Aufbereitung des Signals erfolgt auch auf dem Mainboard. Die erkannten Impulse werden über einen kleinen Piezolautsprecher wiedergegeben. Um sie auch zählen zu können, muss man nicht mit einer Stoppuhr vorm Lautsprecher sitzen und im Minutenabstand die Pieptöne zählen – nein – das übernimmt ein Microcontroller, der wie heute üblich, aus einem fertigen Board besteht. Hier hat der Designer einen Arduino Nano (oder auch Nanonachbau) gewählt. Auf dem wiederum läuft ein Programmchen, dass das Zählen der Impulse übernimmt und auch gleich schön auf einem zweizeiligen LC-Display anzeigt und idealerweise auch noch in µSievert/h umrechnet. Um die Pulse dem Arduino zu übergeben, wird der Pegel des Signals auf TTL-Level gebracht und an den Interrupt-Eingang des Arduino geschaltet. Das LC-Display benutzt den I2C Ausgang des Arduino. Die Leitungen dafür werden lediglich von der Buchsenleiste, in die der Arduino gesteckt wird, über das Mainboard zur Buchsenleiste für das Display geführt. Um das ganze System mit Spannung zu versorgen, werden direkt die 5V vom USB-Anschluss des Arduino verwendet. Optional kann man die 5V auch über eine Steckerleiste am Mainboard anschließen.
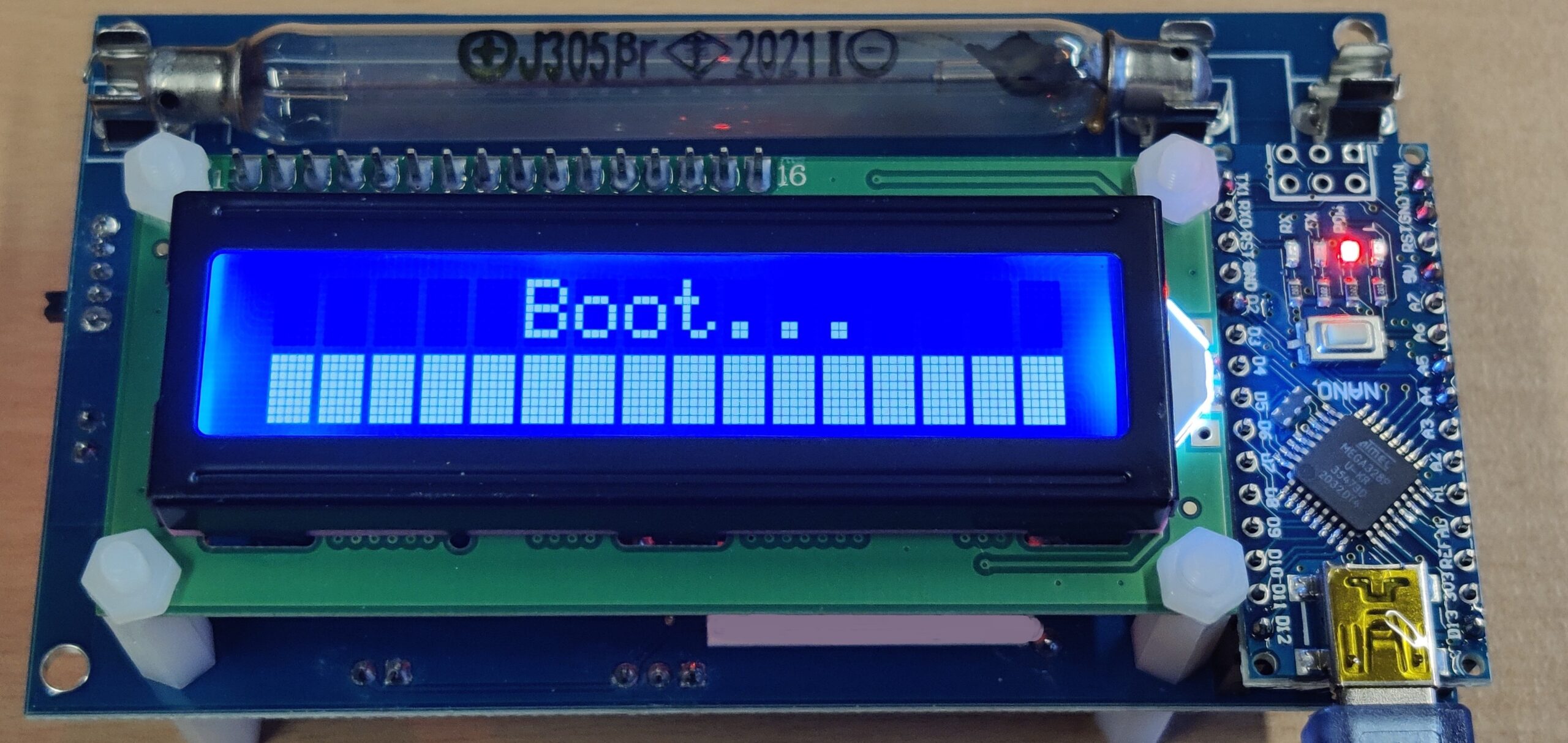
Ist alles zusammengebaut und die USB-Versorgung angesteckt, dann gibt es zuerst einmal eine kurze Wartezeit in der die Hochspannung aufgebaut wird. Hier hat sich der Programmierer eine Animation ausgedacht, die am Display „Boot…“ anzeigt.
Und dann geht es auch schon los. Der Geigerzähler ist betriebsbereit und beginnt zu zählen. Als Test habe ich lediglich eine alte Uhr, deren Zeiger mit Radiumfarbe bemalt sind, zur Verfügung. Hier ist zumindest eine deutliche Änderung der Anzahl der detektierten Zählimpulse festzustellen, wenn man die Uhr in die Nähe des Zählrohrs bringt.
Diesmal hat ein defektes Aktivlautsprecherpaar zu mir gefunden, das aus der professionellen Ecke der Schallerzeugungsgeräte stammt. Auch diese Geräte haben gelegentlich Probleme, oder fallen aus. Recherchiert man ein wenig in den Foren im Internet, so sind die KH-120 Boxen sehr robust und langlebig. Die einzigen Probleme, über die ich gelesen habe, sind Ausfälle des Netzteils. Gelegentlich gibt es auch Meldungen über ein deutliches Rauschen bis Pfeifen auch wenn kein Signal angelegt ist.
Genau dieses Problem zeigten diese Exemplare. Nach dem Einschalten war ein Zischen, Rauschen bis zu leichten Pfeiftönen zu hören. Diese konnten mit den Filter- und Verstärkungsschaltern beeinflusst, aber nicht behoben werden. Wenn die Lautsprecher für längere Zeit in Betrieb waren – so in etwa nach einer halben Stunde, dann verringerte sich das Rauschen.
Leider habe ich es nicht geschafft, im Netz brauchbare Infos über diese Fehler zu finden, geschweige denn einen Schaltplan des Boards. Es bleibt daher nichts übrig, als selber auf die Suche zu gehen, das Board zu analysieren und Systematisch nach dem Fehler zu suchen.
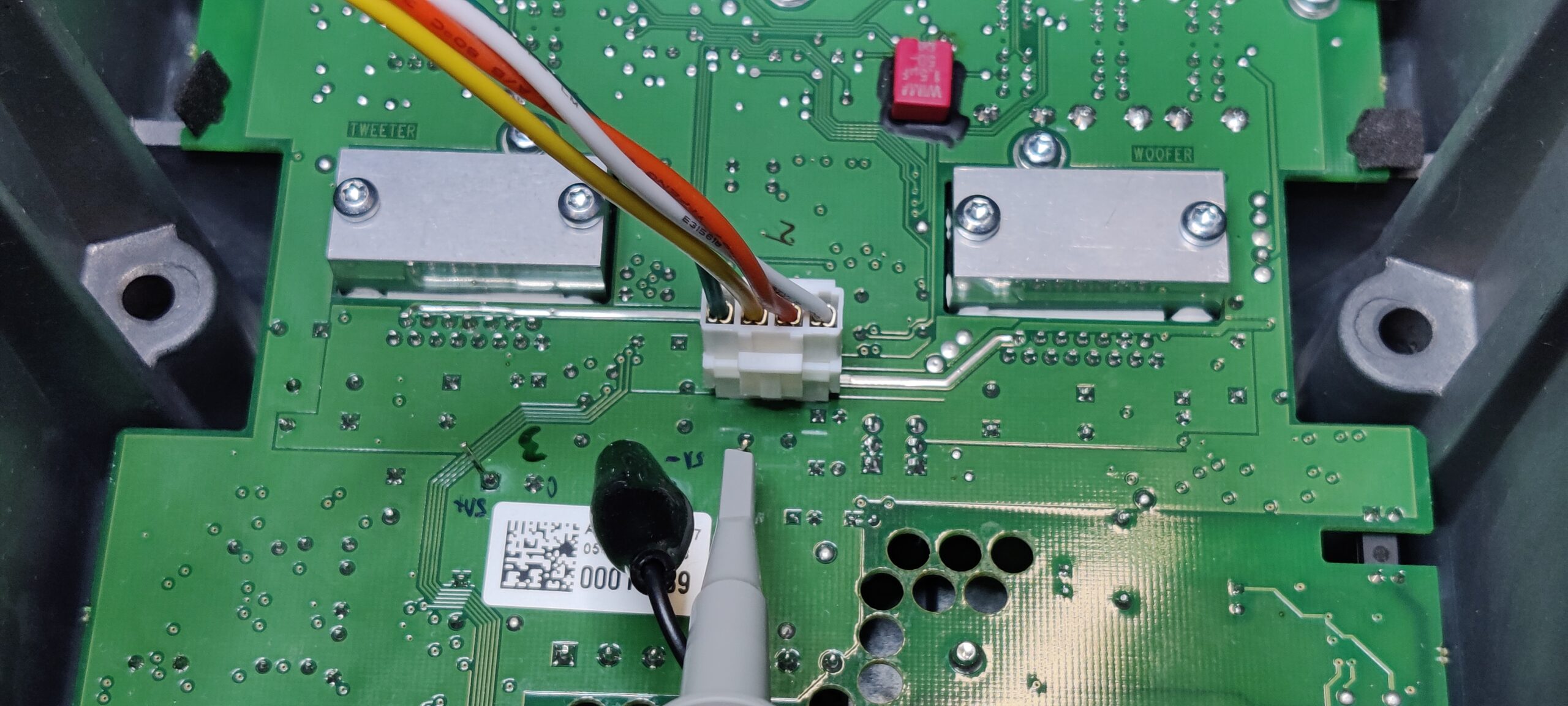
Beginnend mit dem Entfernen der vier langen Inbus-Schrauben können die beiden Gehäusehälften vorsichtig auseinandergezogen werden. Darin offenbaren sich dann zwei weiße Dämmstoffblöcke. Diese können einfach herausgenommen werden. Die Drahtverbindung zu den Lautsprechern lässt sich über einen vierpoligen Stecker von der Platine lösen. Ebenso die Verbindung zum kleinen LED-Logo Board.
KH-120 ist geöffnet und der Dämmstoff entferntIm Bild ist der Steckverbinder mit den Drähten zu den Lautsprechern zu sehen
Als nächstes kann die Platine vom Gehäuse losgeschraubt werden. (hier ist ein Torx Bit zu verwenden) Es sind alle Schrauben, bis auf die beiden schwarzen Kreuzschlitzschrauben zu lösen. Danach ist das Board vorsichtig aus dem Gehäuse zu entnehmen.
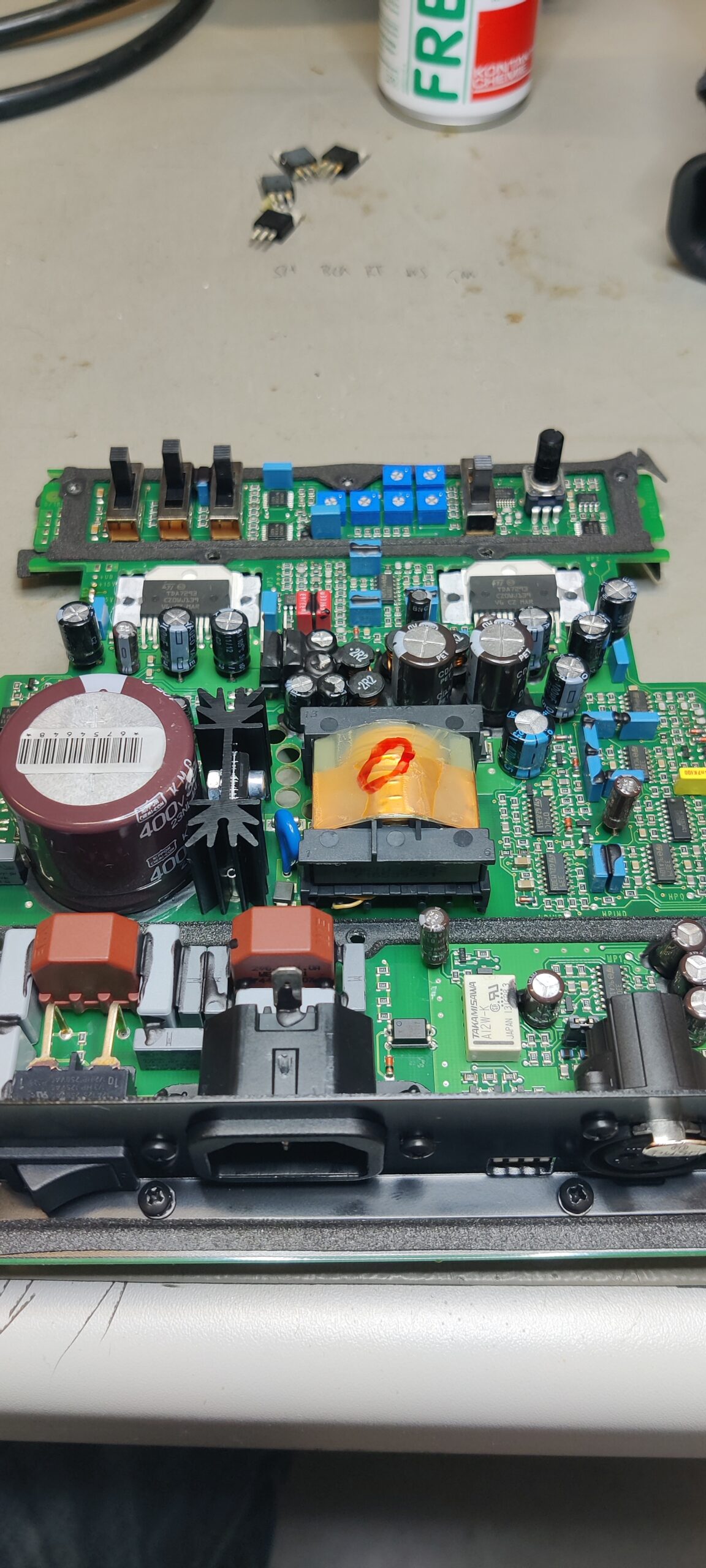
Platine des Neumann KH-120
Optisch sieht die Platine sehr gut aus. Alle Bauteile, die durch den Schall in mechanische Schwingungen und evtl. Resonanz versetzt werden können, sind mit elastischem Kleber gesichert. Das Boardlayout ist schön und übersichtlich. Man erkennt links unten im Bild den Netzeingang und den Netzfilter. Darüber ist der große Elko für die Glättung der, aus der Netzspannung erzeugten Gleichspannug zu sehen.
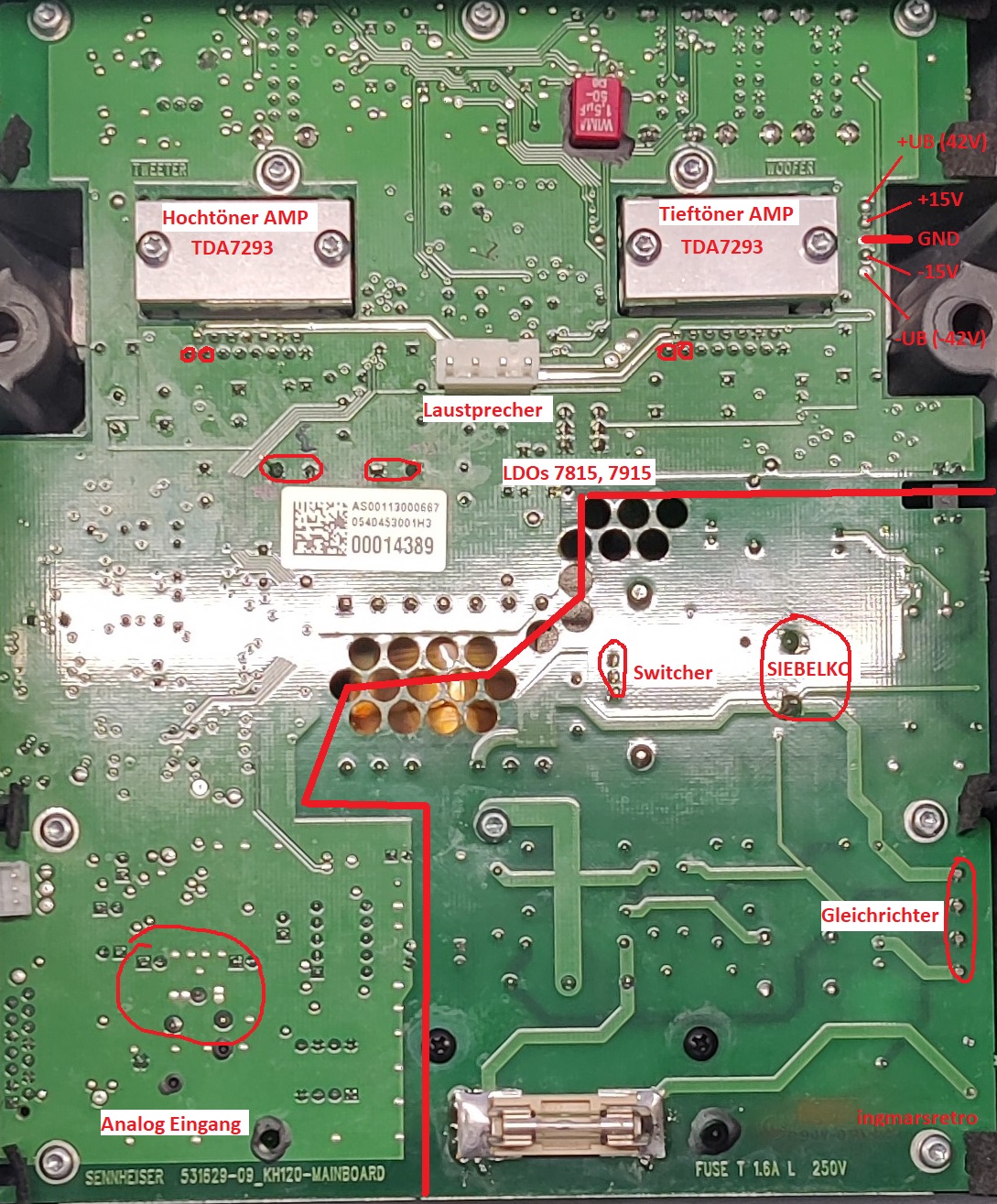
Das Netzteil ist ein Schaltnetzteil. Der über einen Controllerchip angesteuerte Mosfet taktet den Übertrager. Auf der Sekundärseite wird wieder gleichgerichtet und die symmetrischen Spannungen +Ub und -Ub für den Leistungsteil der Endstufen, sowie +15V und -15V für die Versorgung der Vorverstärkung und Signalaufbereitung erzeugt. Ub liegt dabei bei -42 bzw. +42V. Die Leistungsendstufen sind zwei TDA7293 ICs. Hierbei steuert einer den Hochtöner und der andere den Tieftöner Lautsprecher an.
Rückseite der Platine
Um nun nach der Ursache des Problems zu suchen, geht man systematisch vor. Mit einem Multimeter habe ich zuerst die Versorgungsspannungen überprüft. Die sind natürlich da. Aber die Wahrheit sieht man erst wenn man sie etwas genauer ansieht. Hier reicht das Multimeter nicht mehr aus. Ein Oszilloskop offenbart auch den AC-Anteil oder Restwelligkeit.
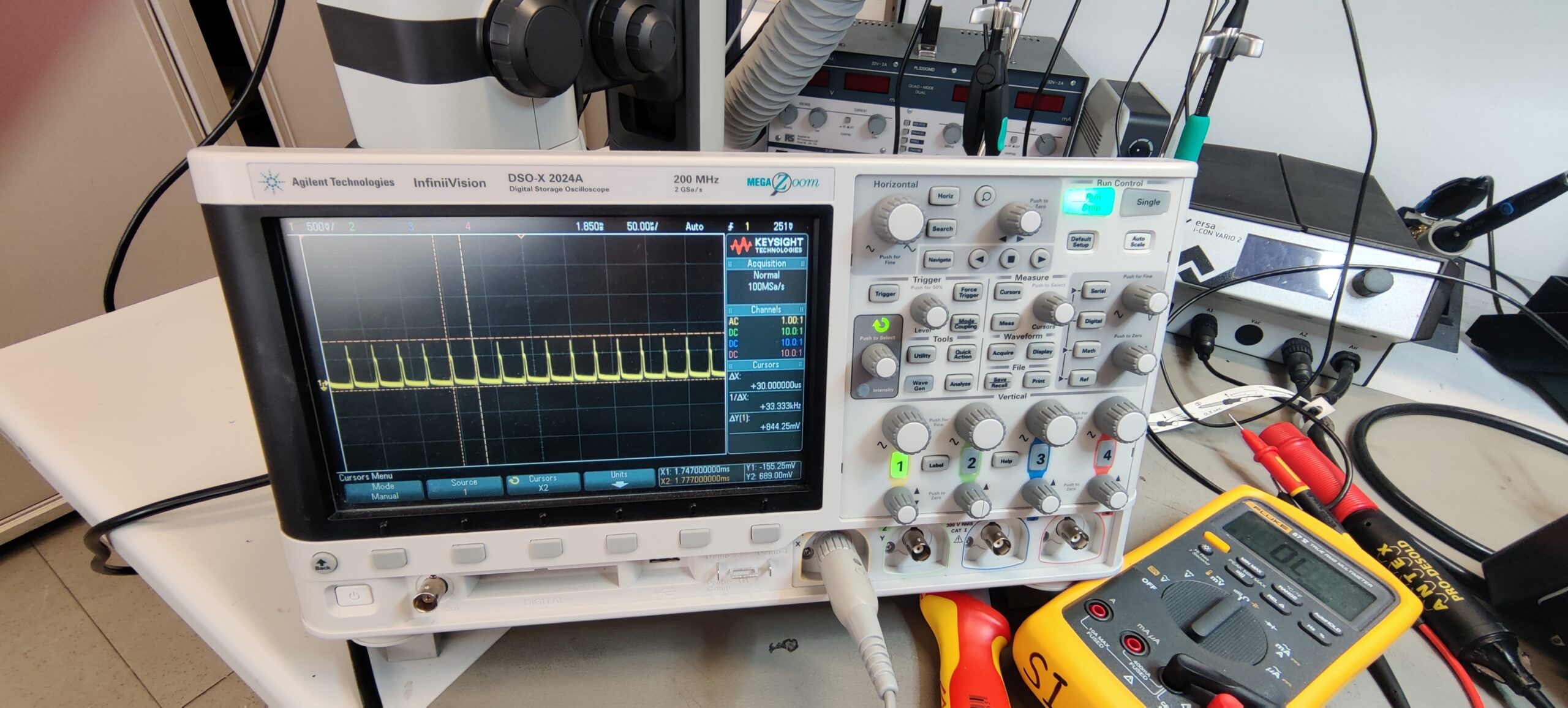
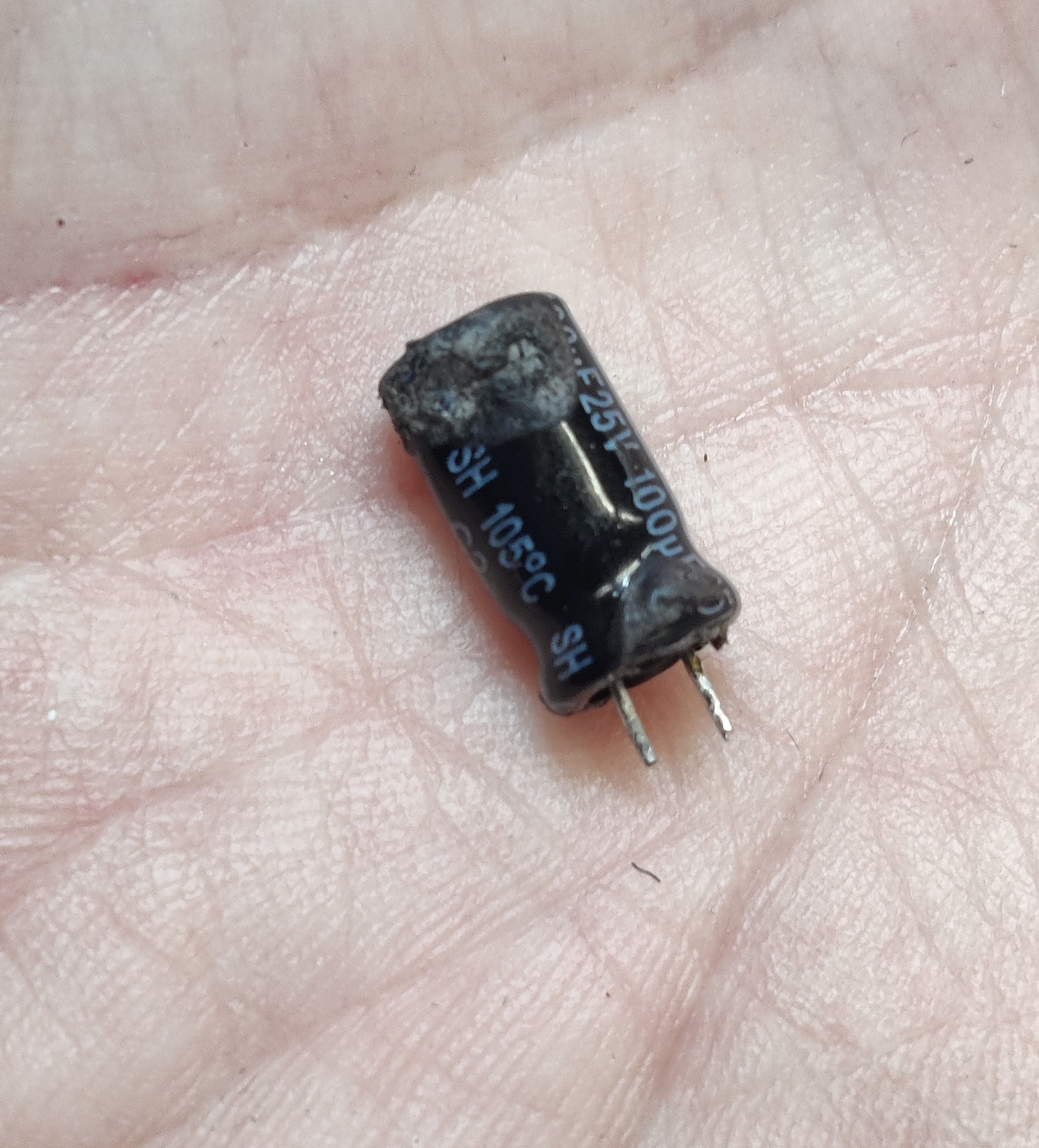
Auf dem Bild ist der AC-Anteil der -15V Spannungsversorgung dargestellt. Mit ca. 800mV ist der jedoch verdächtig hoch. Die Periodendauer dieser Spitzen mit 30µs weist auf das Regeln des Übertragers hin, wenn das Netzteil kaum Leistung abgeben muss. Innerhalb der Impulse ist die Schaltfrequenz des Übertragers zu erkennen. Was aber noch zu erkennen war und auf dem Standbild nicht zu erkennen ist, sind niederfrequentere, unsymmetrische Anteile mit einer ebenso hohen Amplitude. Demnach scheint ein Problem bei der Glättung der Spannung vorzuliegen. Also untersuchte ich den Aufbau der -15V Versorgung. Und siehe da, die +/-15V werden mit einem Längsregler realisiert. Für die +15V wird ein 7815 und für die -15V ein 7915 Regler im TO220 Gehäuse eingesetzt. In der Applikation Note werden für den IC am Eingang sowie am Ausgang Kondensatoren gegen Masse vorgeschrieben. Und genau diese habe ich mir zuerst genauer angesehen. Ein Elko mit 100µF/35V und 105° wird am Eingang des 7915 verwendet. Dieser Elko musste raus zum Messen. Gleich nach dem Ausbau kam mir vor, das Gewicht des Bauteils ist zu leicht – das fühlte sich so nach nichts an. Also ran an die LCR-Brücke und siehe da, die Kapazität lag irgendwo bei 1.4µF.
der Verursacher
Ein neuer Elko war schnell eingebaut und die erneute Messung der Spannungen offenbarte wieder ein schönes Signal. Der AC Anteil war nun wesentlich geringer und die unregelmäßigen Störungen waren verschwunden. Lediglich das Schalten des Übertragers war noch zu sehen. Was aber noch auffiel, bzw. nicht mehr auffiel, waren die Geräusche aus den Lautsprechern – das Rauschen war weg.
Wer mit Matlab und Simulink arbeitet oder lernt und einen LEGO EV3 Brick samt Sensoren und Aktoren besitzt, kann diese Systeme miteinander verknüpfen. Rund um den EV3 Brick gibt es natürlich eine Community und etliche Plattformen, über die man mit dem Brick kommunizieren kann. Doch dazu später.
Der Lego EV3 Brick ist im Wesentlichen ein Einplatinencomputer der mit einem LC-Display und vier Input- sowie vier Output-Ports (Schnittstellen für Sensoren und Aktoren) ausgestattet ist. Als Datenschnittstellen gibt es einen USB Port als HOST und einen MiniUSB Port als Interface zum PC und den diversen Softwaretools.
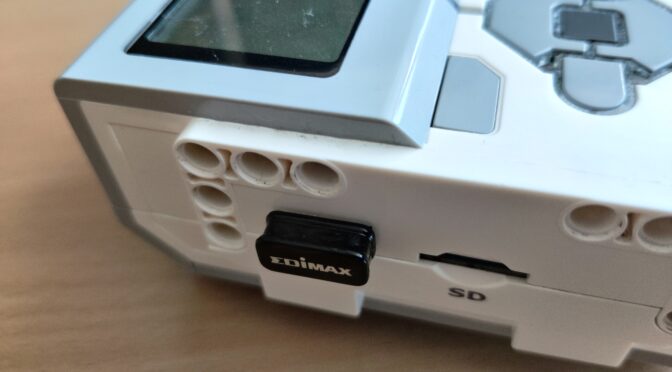
Will man mit dem Brick wireless kommunizieren, so ist dies über WiFi, beziehungsweise über Bluetooth möglich. Allerdings ist die Hardware zur Funkübertragung nicht im Brick verbaut und muss als USB Dongle in den Host-Port gesteckt werden.
Folgende USB Wifi Sticks sind lt. Internetrecherche mit dem EV3 und der originalen Legofirmware ab 1.08 kompatibel: (Quelle: Internet)
tp-link WL0084E
EDIMAX EW-7811Un mit dem Chipsatz RTL8188CUS
LogiLink WL0084W auf der Vertriebsseite (Conrad) angeblich mit dem Chipsatz Railink RT5370 jedoch das Herstellerdatenblatt gibt den Chipsatz RTL8188EUS an.
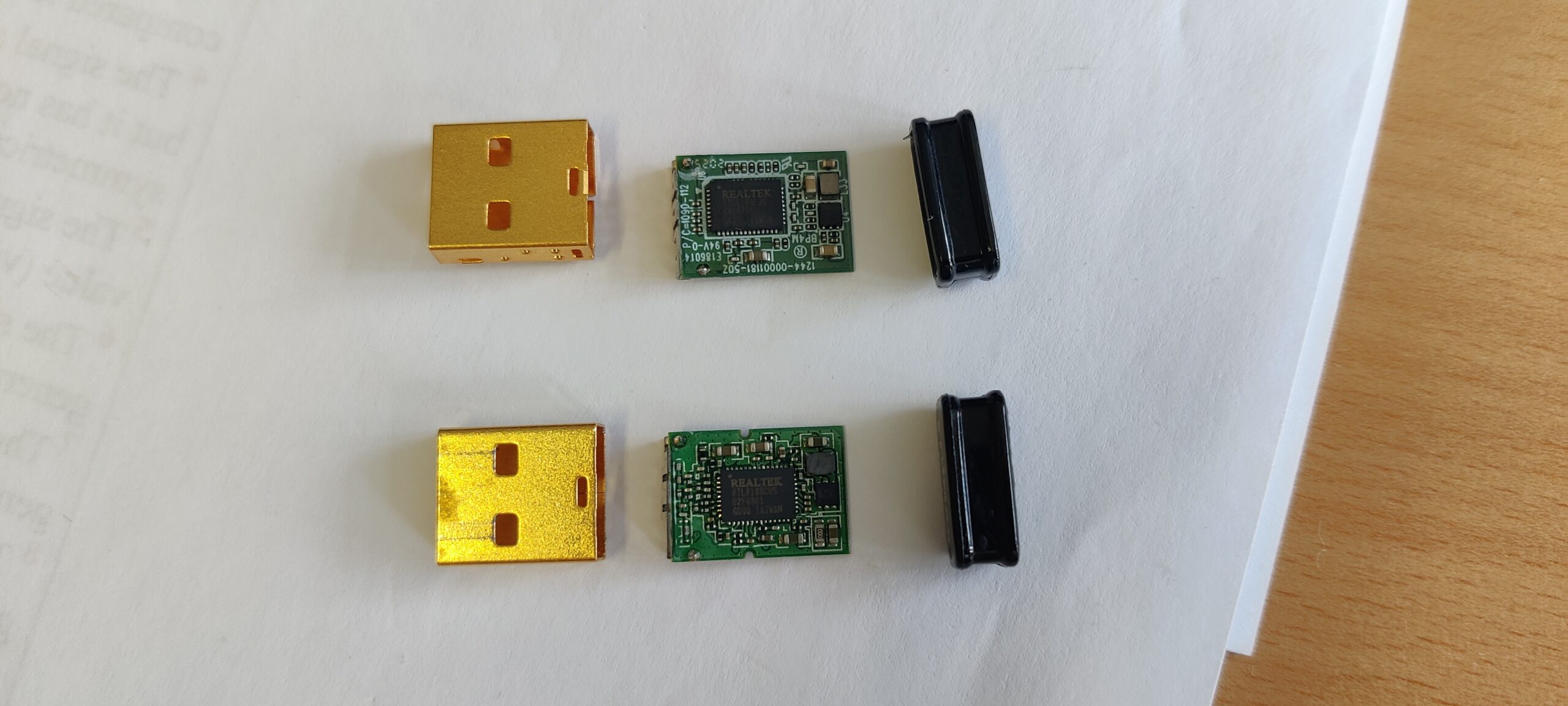
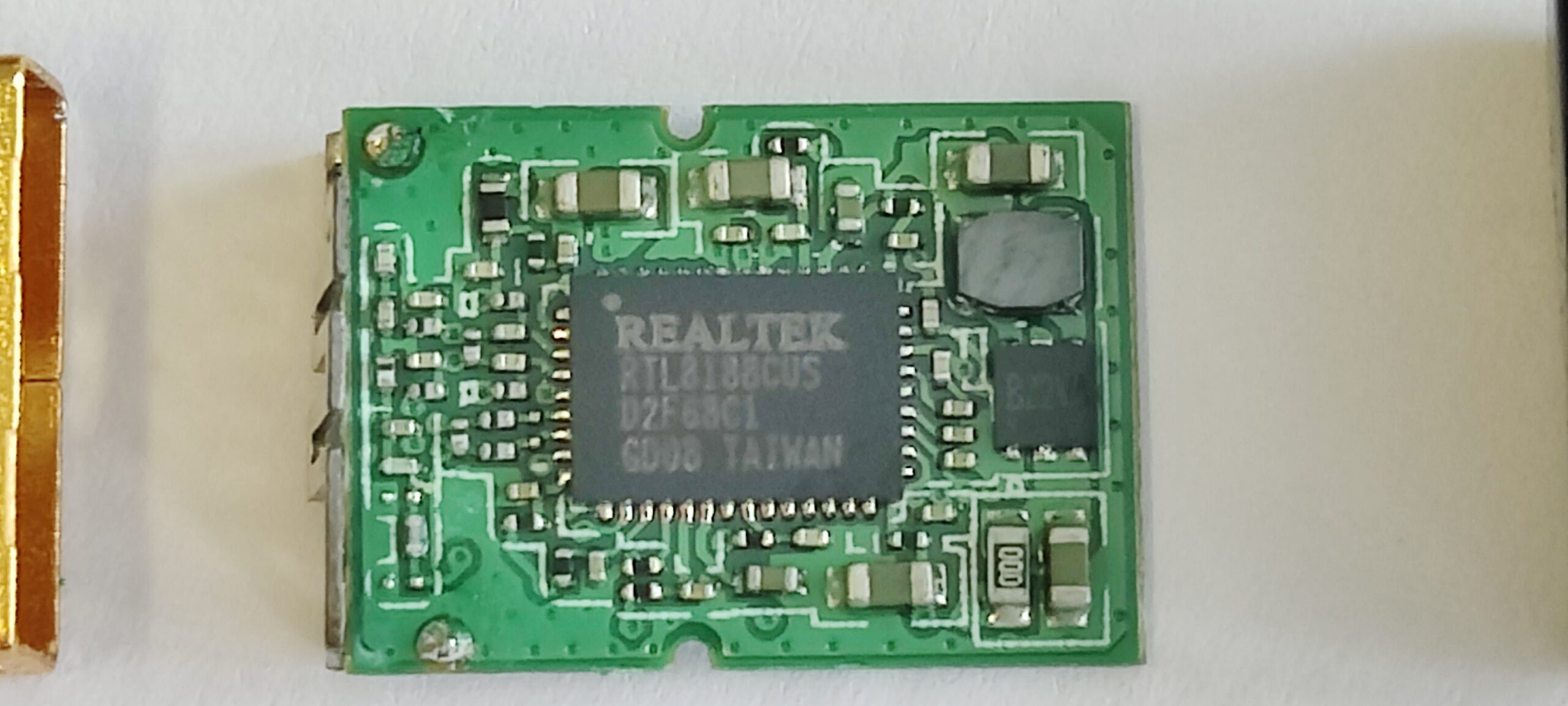
Im Test hat sich gezeigt, dass lediglich Dongles mit dem Realtek RTL8188CUS Chip im embedded Linux des EV3 Driver mäßig implementiert sind. Der Nachfolger von Realtek der RTL8188EUS funktioniert hier nicht. Und die meisten Hersteller von Wifi USB Dongles (Stand 2021) vertreiben ihre Sticks mit dem 8188EUS Chip, sei dies TPLink, Edimax, LogiLink und wie sie alle heißen. Erkennbar ist das bei manchen an der Typenbezeichnung V2, oder 7811UN V2 (bei Edimax) oder V.02, V.03 bei TPLink. Ist diese Kennzeichnung beim Stick oder dessen Verpackung dabei dann wird das nix. Zumindest nicht, wenn mit der originalen Legofirmware gearbeitet werden will.
Vergleich edimax 7811un und 7811un v2edimax 7188un mit RTL8188CUS chipedimax 7188un V2 mit RTL8188EUS chip
Nun weiter zum EV3 Brick:
Auf diesem Einplatinencomputer läuft ein auf Linux basierendes embedded Betriebssystem das auf einem internen Flash- Speicher abgelegt ist. Dieses Betriebssystem wird in Form einer Firmware von LEGO zur Verfügung gestellt und ist zur Zeit in der Version 1.10 verfügbar. Diese Firmware ist beinhaltet sämtliche Partitionen der Laufwerke und deren Inhalt und wird im Rahmen eines Updates in einem „.bin“ File verpackt in den Flash geladen. Mit den Softwaretools „binwalk“ ist es unter Linux möglich, die Struktur der Partitionen aus dem Firmware File wiederherzustellen, zu ändern und wieder als „.bin“ Firmware Image auf die Hardware hochzuladen.
Es gibt aber auch Custom Firmware und Betriebssysteme die per SD-Card gebootet werden können. Welche Treiber hier mitgeliefert werden ist auf den Seiten der entsprechenden Custom OS Hersteller nachzulesen.
Folgende Betriebssysteme habe ich für den EV3 auf die Schnelle gefunden:
Fakt ist jedoch: der in die originale Lego EV3 Firmware (1.08H , 1.09D) integrierte Treiber für WLAN-Sticks unterstützt nur den Chipsatz RTL8188CUS. Und den benötigt man, wenn man über SIMULINK im „Monitor und Tune“ Modus mit dem Brick arbeiten will. Denn interessanter Weise klappt das NUR über eine WiFi Verbindung und NICHT über einen direkten USB Link zwischen PC und EV3.
Es ist auch NUR mit der Firmware 1.08H möglich mit Simulink zu kommunizieren da hier TELNET und SSH als Kommunikationsprotokoll genutzt werden. Und nur in der 1.08H ist eine ungeschützte Verbindung der Weg zum Erfolg. Ab der Version 1.09D ist ein Login notwendig.
Da die Firmware Versionen mittlerweile schwer zu finden sind, stelle ich hier einen Link zum Download herein.
Was benötigt man nun, um über Simulink mit dem EV3 sprechen zu können ?
zunächst muß Matlab und Simulink installiert sein
dann muss man das Support Package EV3 für Matlab und EV3 für Simulink herunterladen und installieren
auf dem EV3 Brick solltedie originale Firmware 1.08H vorhanden sein. Ist dies nicht der Fall kann die Version über den Firmwaredownloader in der orginalen EV3 PC Software auf das Gerät übertragen werden.
im EV3 Brick muß ein USB Wifi Dongle mit dem „CUS“ Chipsatz stecken
der PC muß idealerweise im selben Netz hängen wie auch das Wifi-Funknetz mit dem sich der Brick verbindet. Ein DHCP Server muß die IP Adressen für die Funkgeräte verteilen
jetzt kann der Brick gestartet werden. Danach muß er mit dem WLAN Netz verbunden werden (es sollten WPA2 Passwörter ohne Sonderzeichen festgelegt sein, da der EV3 Brick diese nicht zur Verfügung stellt)
ist der EV3 mit dem Netz verbunden, dann ist unter dem Menu „Brick Info“ die aktuelle IP Adresse des Bricks und die Brick ID zu notieren. Diese Infos werden gleich im Simulink Setup benötigt
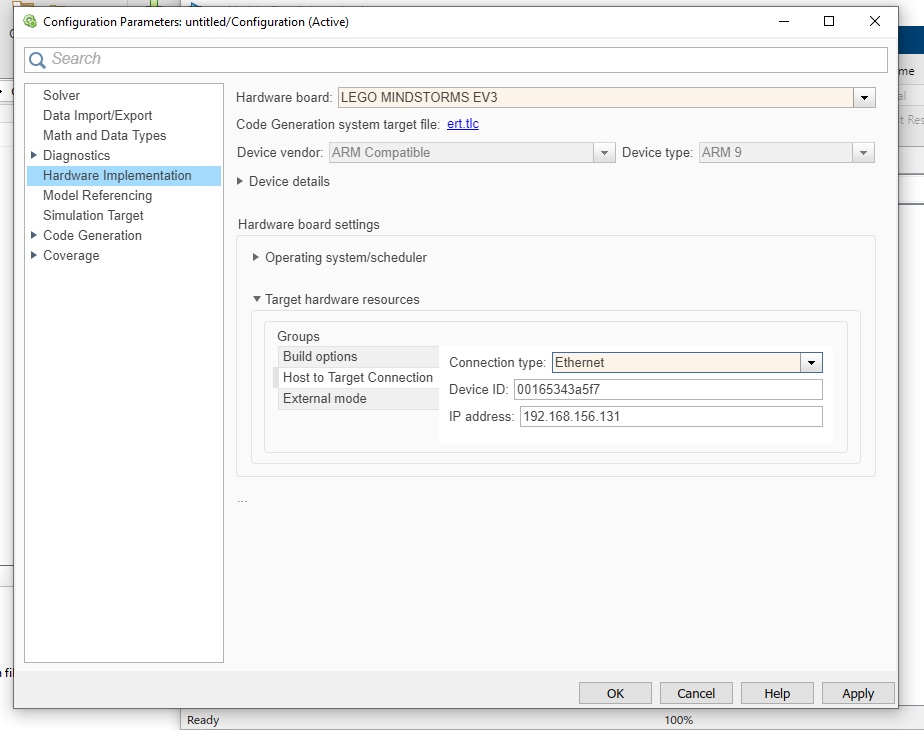
nun zu Simulink: dort ist im Menu „configuration Parameters“ unter „Hardware Implementation -> Hardware board“ Mindstorms EV3 zu wählen
das Setup wird im selben Menu unter „Hardware board settings“ -> Target hardware resources -> Groups -> Host to Target Connection festgelegt. Hier ist „Ethernet“ als Connection Type einzustellen. Die vorher ermittele IP Adresse und ID des Brick sind hier auch einzugeben.Das war´s dann auch schon. Nun sollte es möglich sein eure Simulink Modelle mit der EV3 Hardware zu nutzen und auch die Tune Infos während der Simulation am PC zu sehen …
Da in der zurzeit etwas wärmeren Jahreszeit meine Freizeitaktivitäten vermehrt im Outdoor Bereich stattfinden, leidet das Schreiben von den Weblogs ein wenig. Ich arbeite aber trotzdem an einigen Projekten, Reparaturen und Restaurationen. So kommt auch wieder einiges an Material zusammen, um daraus -in der kälteren Jahreszeit- Beiträge zu verfassen. Diesmal habe ich mich nur wieder über die Abzocke und Preisgestaltung im KFZ – Bereich geärgert und nach einer alternativen Lösung gesucht.
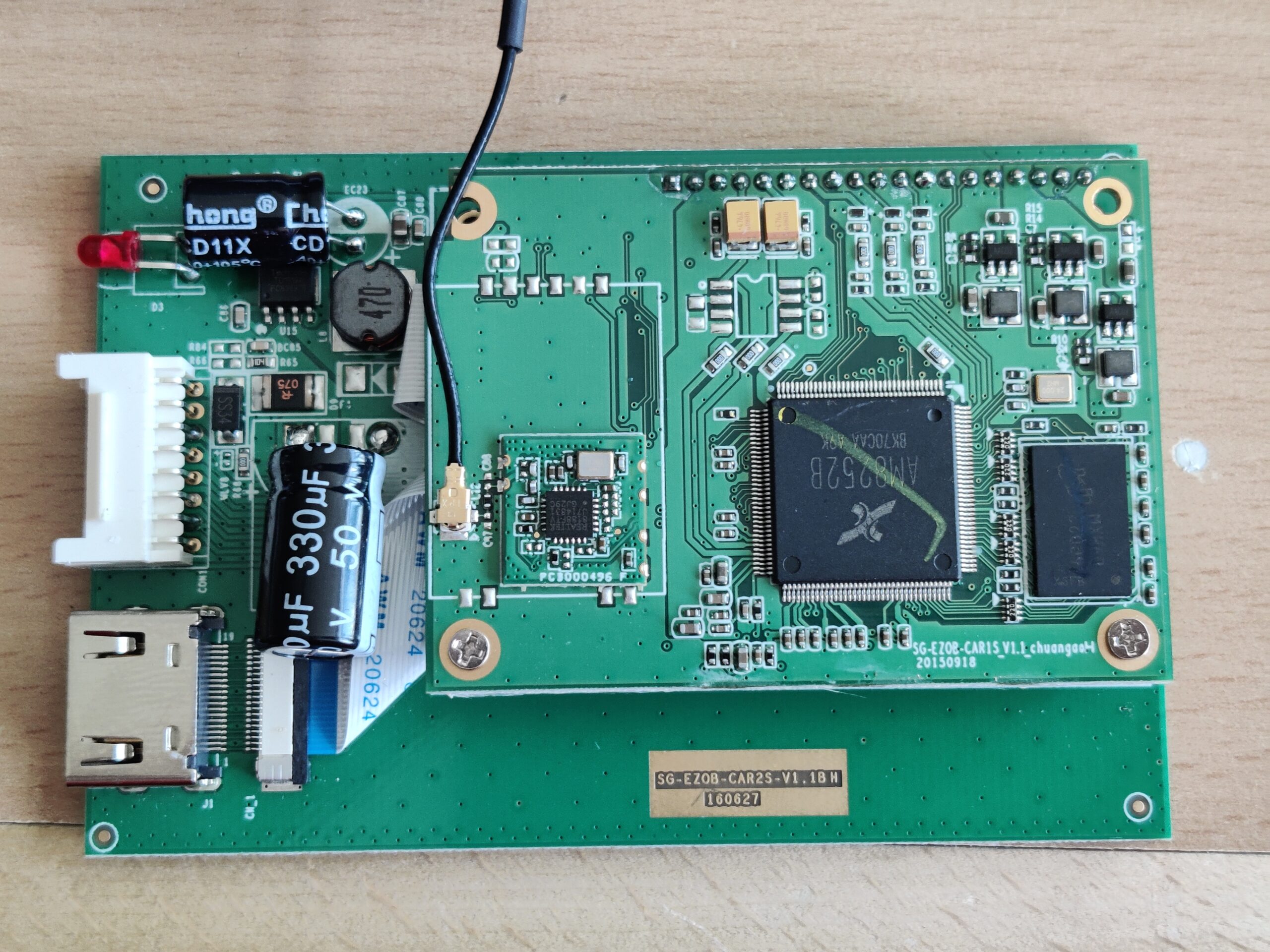
Es geht dabei um mein fünf Jahre altes Auto, das mit einem OnBoard Navigationssystem ausgestattet ist. Die Navigationsdaten sind auf einer im Fahrzeug gesteckten SD-Karte gespeichert. Soweit so gut. Die Kartendaten des Fahrzeuges sind mittlerweile allerdings auch in die Jahre gekommen und vieles ist nicht mehr aktuell. Sowas stört besonders wenn man sich auf einer Urlaubsreise befindet und das Navi das Ziel nicht kennt, oder den Weg dorthin nicht verzeichnet hat. Alles kein Problem dachte ich mir, Kartendaten sind ja auf der SD-Karte – da gibt´s doch sicher Updates. Und ja es gibt sie – allerdings kosten die Kartenupdates von 200Euro aufwärts und mehr. Dafür bekomme ich ja ein komplettes Navigationsgerät samt aktuellen Karten mit gratis Onlineaktualisierung.
Also habe ich versucht, mich schlau zu machen und eine aktuelle Karte im Netz zu finden und auf die SD-Karte zu speichern. Aber das klappt natürlich nicht. Hier werden einige Sicherheitsmechanismen angewandt. So ist zum Beispiel die Hardware ID der Speicherkarte im Navigationssystem hinterlegt (kodiert). So scheiterte mein erster Versuch die originale Navikarte als Image auf eine neue SD-Karte zu kopieren. Sie wird als nicht gültige Karte erkannt. Und mit Diagnosegerät VCP und VCDS im Navirechner ohne Anleitung herumzubasteln ist mir dann zu viel Aufwand. Also musste eine andere Möglichkeit her. So ist auf jedem Smartphone ein online Navi installiert – nennt sich Google Maps. Und zudem gibt es auch einige offline Navisystemen die kostenfrei von den Webstores zu laden sind. So war nun meine Idee das Auto um eine Phone Mirror Funktion zu erweitern. (diese Dinge nennen sich Android Car Play in der Obstabteilung usw.) Da meine alte Kiste nichts davon im Entertainmentsystem bereitstellt gab es für mich folgende Alternativen:
Entweder kaufe ich ein China Navi zum Nachrüsten – und dabei meine ich die, den originalen Boardmonitoren des Autos nachempfundenen Bildschirme, in die dann ein Android Rechner eingebaut ist. Dort können dann die entsprechenden Apps zur Navigation und andere Spielereien installiert werden. Die Daten des originalen Bildes des Auto Infotainment Systems werden natürlich weiterhin dargestellt. Solche Systeme sind in der Größenordnung von 400-600 Euro zu bekommen. Dazu kommen dann noch ein paar Stunden an Einbau- (Bastel-) Arbeiten.
Eine andere Möglichkeit ist ein Retro Fit Umbau. Das bedeutet, ich baue das höherwertige Infotainment System mit dem entsprechenden Funktionsumfang in das Fahrzeug ein. Das wiederum bedeutet: das alte System ausbauen, ein neues System vom Fahrzeughersteller samt allen notwendigen Steuergeräten, Kabelbäumen, Abdeckblenden etc. zu kaufen, dann einzubauen und im Anschluss alles mit viel Aufwand codieren, Parameter einspielen usw. Die Kosten sind immens und rechnen sich auf keinen Fall (>2500,- wenn’s reicht) und dann noch die Arbeit für den Aus- und Einbau. -> alles kann man das vergessen.
MiraScreen Empfänger
Und hier die letzte Möglichkeit für alles zusammen gerade mal 50Euro und mit einem Aufwand von 30 Minuten Einbau bestehend aus folgenden Punkten:
die Video In Motion (VIM) Funktion des Displays bzw. der Radiounit freischalten
ein AMI Kabel mit Composite Video In und Audio In erwerben
einen MiraScreen WLAN-Receiver um gerade mal 40Euro erwerben, der imstande ist, das Videosignal auch per CVBS auszugeben
das ganze Teil (in diesem Fall) in der Ablage der Mittelkonsole einbauen
das Kabel für die Energieversorgung der Mirabox durch die Ablage zur 12V Steckdose verlegen und anschliessen.
Diese Arbeiten sind schnell gemacht und das Smartphone kann per „Stream“ (im Android Smartphone unter „Kabellose Übertragung in Bluetooth- & Geräteverbindung“) verbunden werden. Jetzt wird der Bildschirm und der Ton des Smartphones auch über das Infotainmentsystem des Fahrzeugs wiedergegeben.
AMI Videokabel
Das AMI-Videokabel wird an der AMI Buchse des Fahrzeugs angesteckt und die analogen Video- und Audioleitungen mit den Chinch-Steckern des MiraScreen Anschlusskabels verbunden.
Stecker für Versorgung, Video und Audio an den MiraScreen
Die Energieversorgung für den Mira Screen habe ich direkt von der 12V Steckdose hinter der Mittelarmlehne entnommen. Dazu habe ich den Stecker der 12V Dose ausgepinnt, je einen Draht an 12V und GND angelötet und wieder eingepinnt. An das andere Ende der beiden Drähte habe ich eine 13,5mm Tamiya Kupplung gekrimpt. Zusätzlich hat die 12V Leitung auch noch eine Flugsicherung erhalten. An diese Tamiya Kupplung wird nun das, durch die Ablage gefädelte Mira Screen Anschlusskabel gefädelt und der entsprechende Tamiya Stecker aufgekrimpt. Um das Kabel durch die Ablage zu bekommen, habe ich einfach ein 7mm Loch gebohrt und einen Gummikantenschutz in das Loch gesteckt.
Kabeldurchführung
Ist das Kabel nun angeschlossen, dann kann die Box angesteckt und in der Ablage verstaut werden.
Im Bild oben ist die Box fertig angeschlossen und in der Mittelarmlehnenablage zu erkennen.
Ist die Lehne heruntergeklappt, so ist von der Box nichts mehr zu erkennen. Man kann sie nach Abziehen der Stecker auch wieder einfach und schnell entfernen.
Nachdem die Zündung nun eingeschaltet ist, kann man im Multimediasystem „Media“ auswählen und dort dann auf CVBS-Videoeingang anklicken. Jetzt sollte der Startschirm der Mira Screen Box zu sehen sein. Man kann die Mira Screen Box auch konfigurieren, indem man das Handy per WLAN mit der SSID „MIRAxxxx“ verbindet und die IP Adresse, die auf dem Startbildschirm angegeben ist im Browser des Smartphones eingibt. Das SSID Password steht ebenfalls am Startbildschirm.
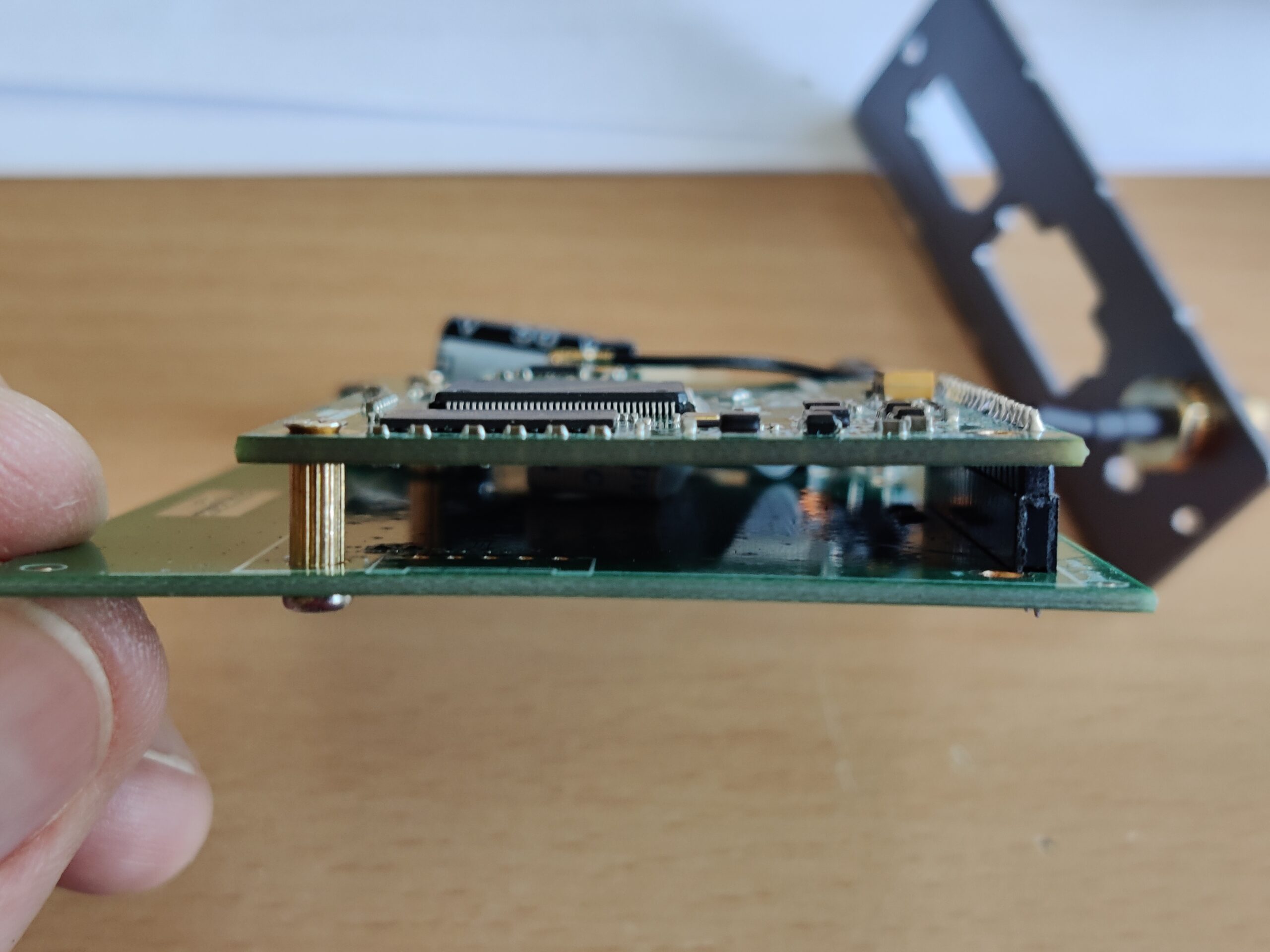
Die Fotos oben zeigen das Innenleben der Box. Bei diesem Gerät hatte sich der Pinheader der Stack-Platine aus der Buchsenleiste teilweise gelöst und dies hatte zu Kontaktproblemen der beiden Platinen geführt. Der Messingabstandhalter (im letzten Bild unten links zu erkennen) ist 2mm zu lange, sodass die beiden Platinen nicht ordentlich zusammenhalten. Als Abhilfe habe ich die beiden Abstandhalter um diese 2mm gekürzt und wieder verschraubt. Somit kann ich die Google Maps problemlos im Auto benutzen.
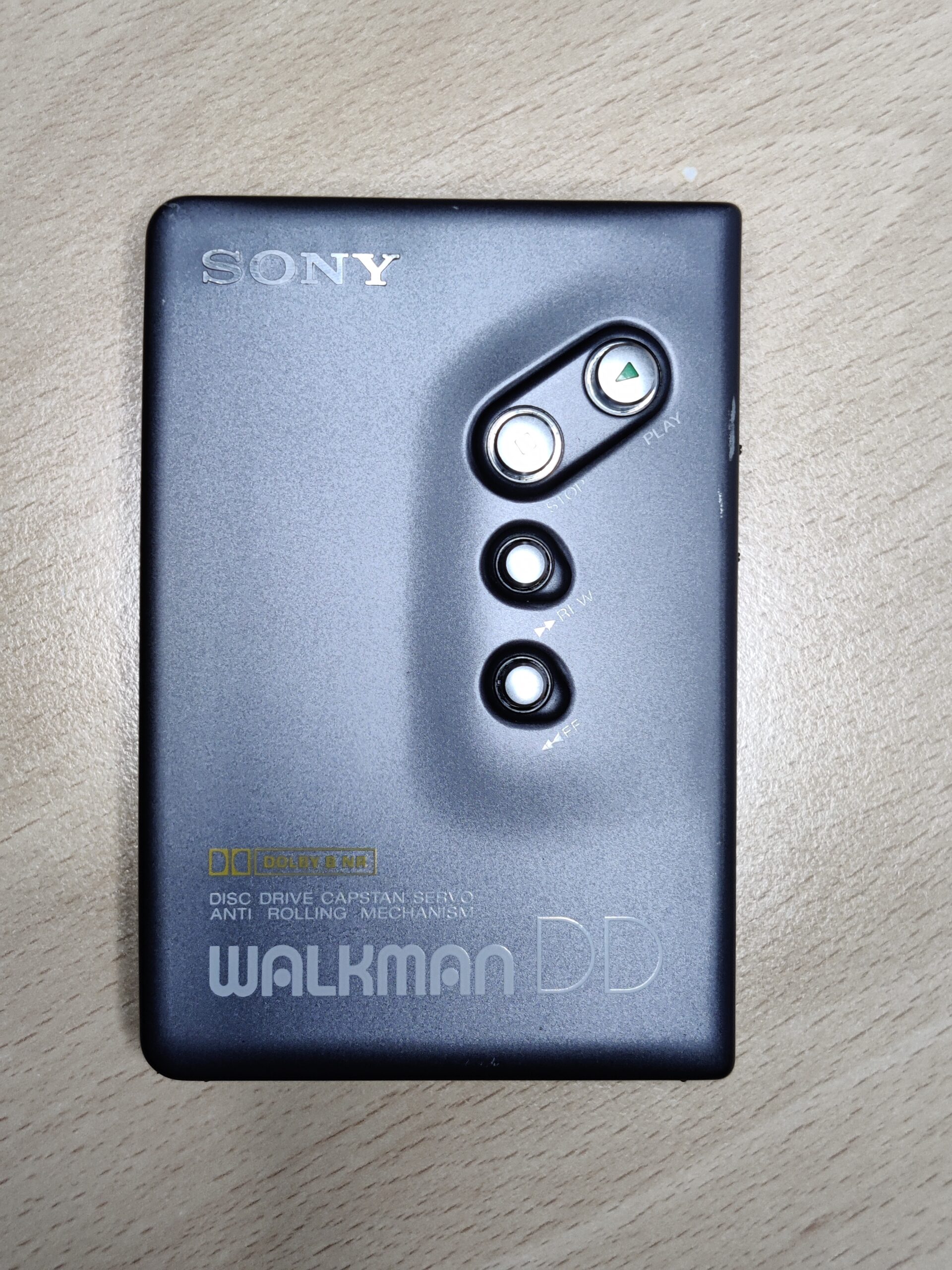
Der portable Kassettenspieler des Herstellers SONY mit der Typenbezeichnung WM-DD11 ist Inhalt dieses Beitrages. Umgangssprachlich als „Walkman“ bezeichnet, habe ich dieses Teil für meine Sammlung erhalten. Natürlich mit der Anmerkung „defekt“ – also wieder eine kleine Herausforderung und gleichzeitig die Hoffnung, dass keine mechanischen, nicht mehr erhältlichen Teile betroffen sind. Auch meine Anfrage vor dem Erwerb, ob es Beschädigungen auf der Platine gäbe, wurde verneint. Das Gerät sei soweit in Ordnung, das Band einer eingelegten Kassette bewegt sich – es komme nur kein Ton aus den Kopfhörern. Also ideale Voraussetzungen für eine Restaurierung.
Aber leider kann man nicht jeder Aussage vertrauen und auch nicht vorher „unter die Haube“ sehen und sich überzeugen, ob der tatsächliche Zustand eines Gerätes auch der Beschreibung entspricht. Als ich das Teil dann in Händen hielt, war der erste Eindruck auch ganz überzeugend. Es waren keine nennenswerten Kratzer und Dellen zu sehen. Der von außen sichtbare Bereich des Batteriefaches war auch sauber. Also Batterien eingelegt, ebenso eine Audiokassette und dann auf Play gedrückt. Und siehe da, wie beschrieben läuft der Bandtransport. Auch wie beschrieben gibt das Teil keinen Ton von sich. Also perfekte Startbedingungen für mein mini Reparatur- /Restaurierungsprojekt.
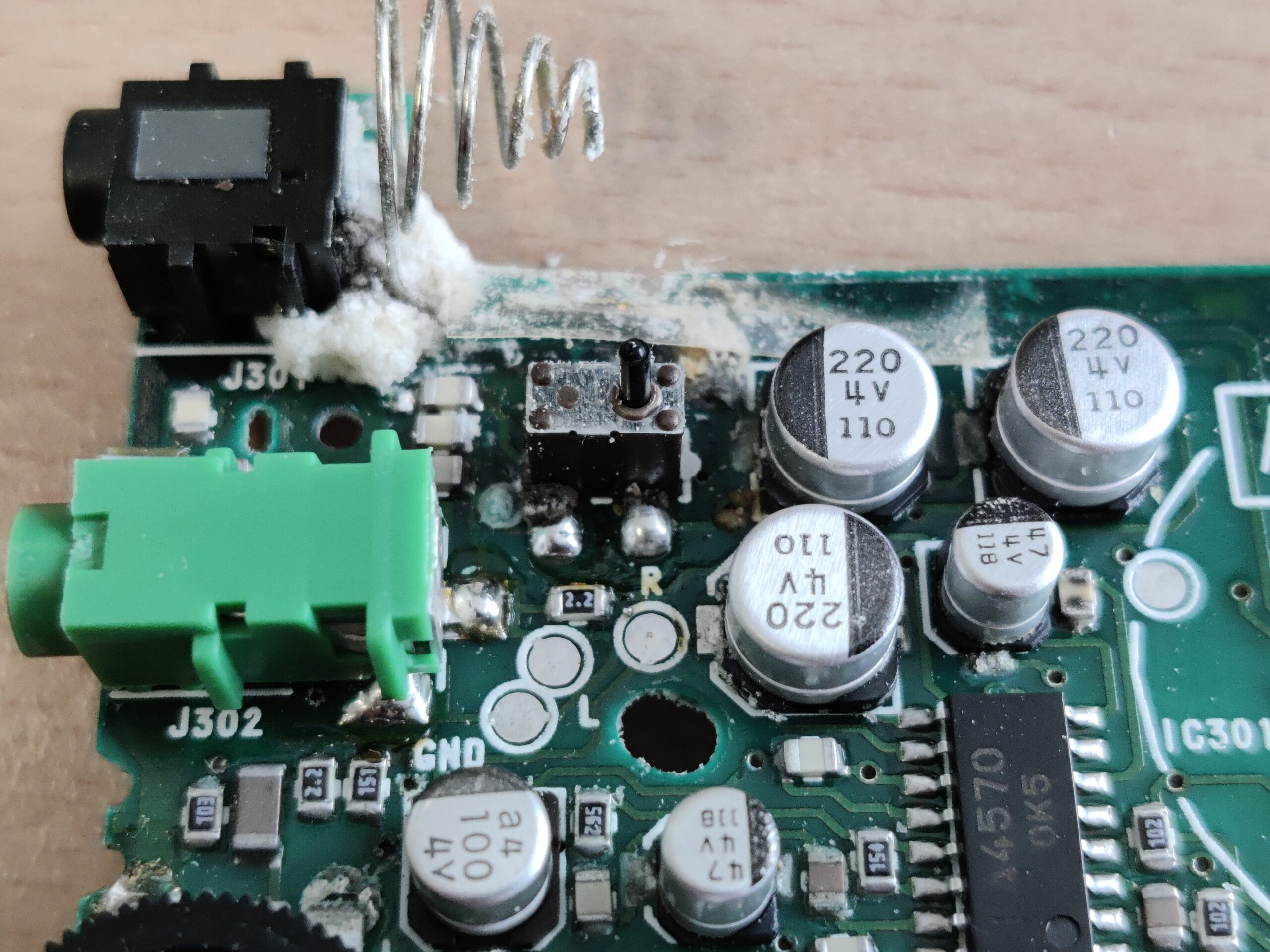
Doch bevor ich mit der Demontage beginne, habe ich ein wenig über die Geschichte zur DD-Walkman Serie von SONY recherchiert. Das erste Modell der Serie DD wurde 1982 verkauft. Die Bezeichnung „DD“ steht für „Disc Drive“, was bedeutet, dass die „Disk“, also die Schwungradscheibe auch gleichzeitig Teil des Capstan-Antriebssystems (Motors) ist. Der Riemen für die weiteren Antriebe (tape reels) wird direkt um die Scheibe (Disk) gelegt. Von den DD Modellen gibt/gab es zwei Preisschienen – die DD-Serie mit der einstelligen Nummerierung (DD-1, DD-2, etc.) und jene mit der zweistelligen Nummerierung (DD-11, …). Zur „Highend-Schiene“ zählen dabei die Geräte mit der einstelligen Nummer. Das hier restaurierte Gerät stammt quasi aus der „Billig-Schiene“. Der DD-11 ist zwar nicht so hochwertig und auch einfacher aufgebaut, aber dafür sind defekte Geräte für ganz geringes Geld zu bekommen und auch ziemlich einfach zu reparieren. (Der DD-11 hat beispielsweise kein Center Wheel, ein häufig defektes – aufgrund von Materialschwäche gebrochenes Teil der High End Serie. Übrig bleiben dann meist Fehler in der Elektronik oder auf der mechanischen Seite – ein gealterter Riemen. Nach einer Recherche im Netz ist der Riemen der selbe, der auch schon im legendären TPS-L2 Walkman verbaut wurde und hat die Bauteilseriennummer: SN 3-499-042-99 (diese Quelle bzw. Nummer habe nicht verifiziert) Man findet den Riemen aber auch, wenn man unter „TPS-L2 Riemen“ auf verschiedenen Onlineportalen sucht.Doch nun genug Infos zum allgemeinen Teil. Eine Ernüchterung und Erdung meiner Restaurierungseuphorie habe ich gleich nach dem Aufschrauben und Öffnen des Gehäuses erfahren. Die Platine ist leider ganz und gar nicht unbeschädigt. Wieder einmal hat jemand die 1.5Volt Zellen nicht entfernt und sehr, sehr lange im Gerät gelassen.
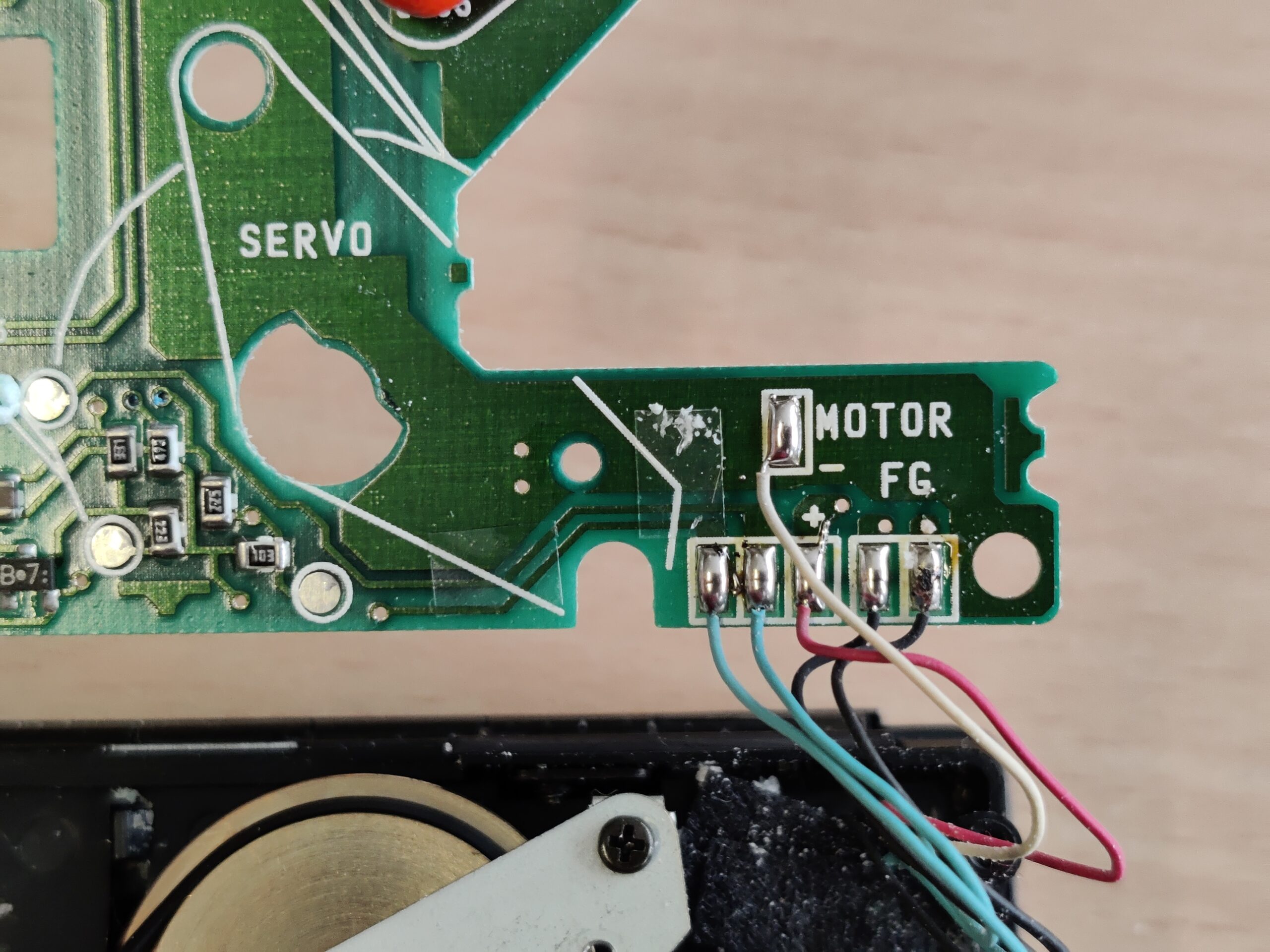
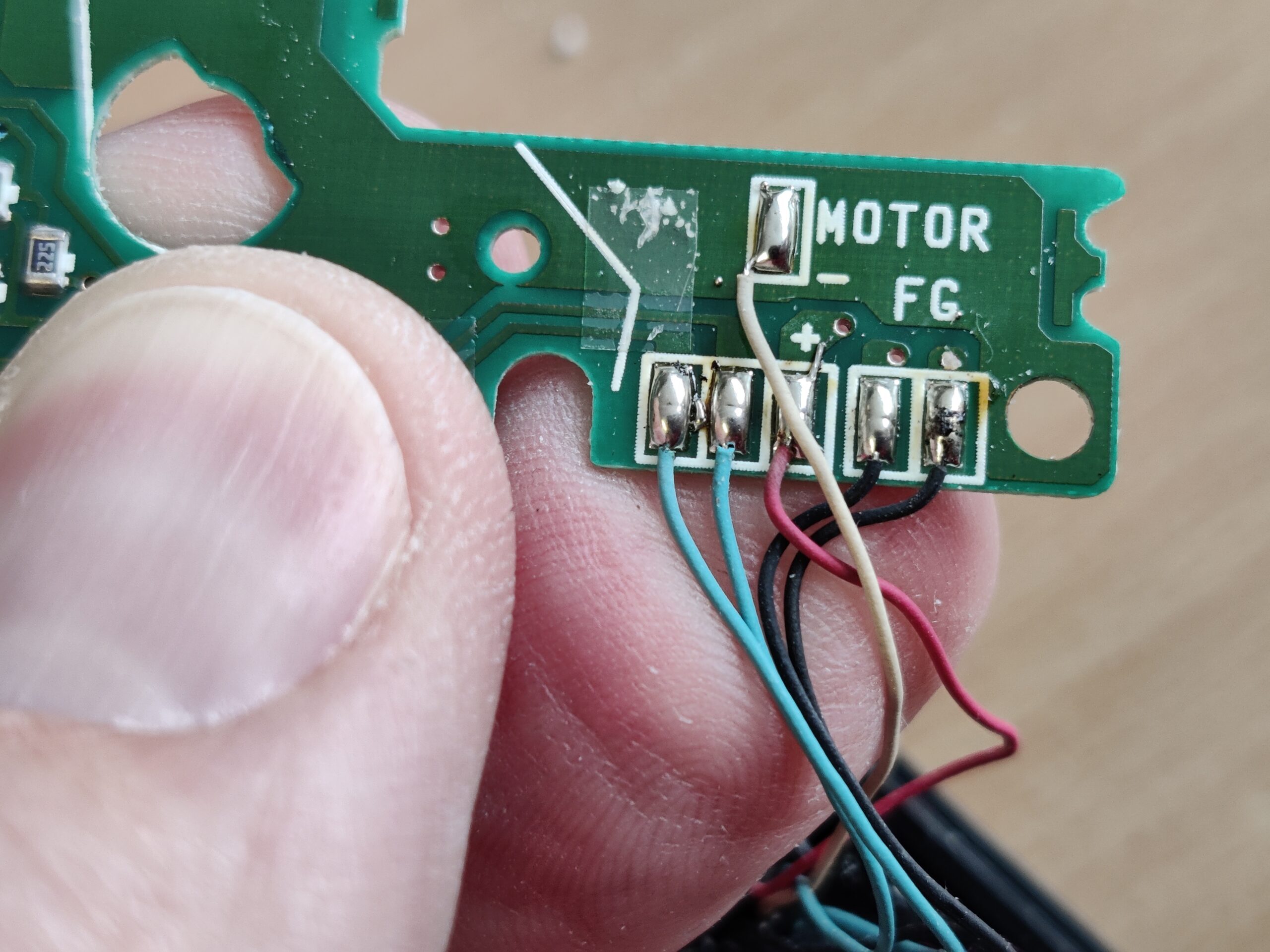
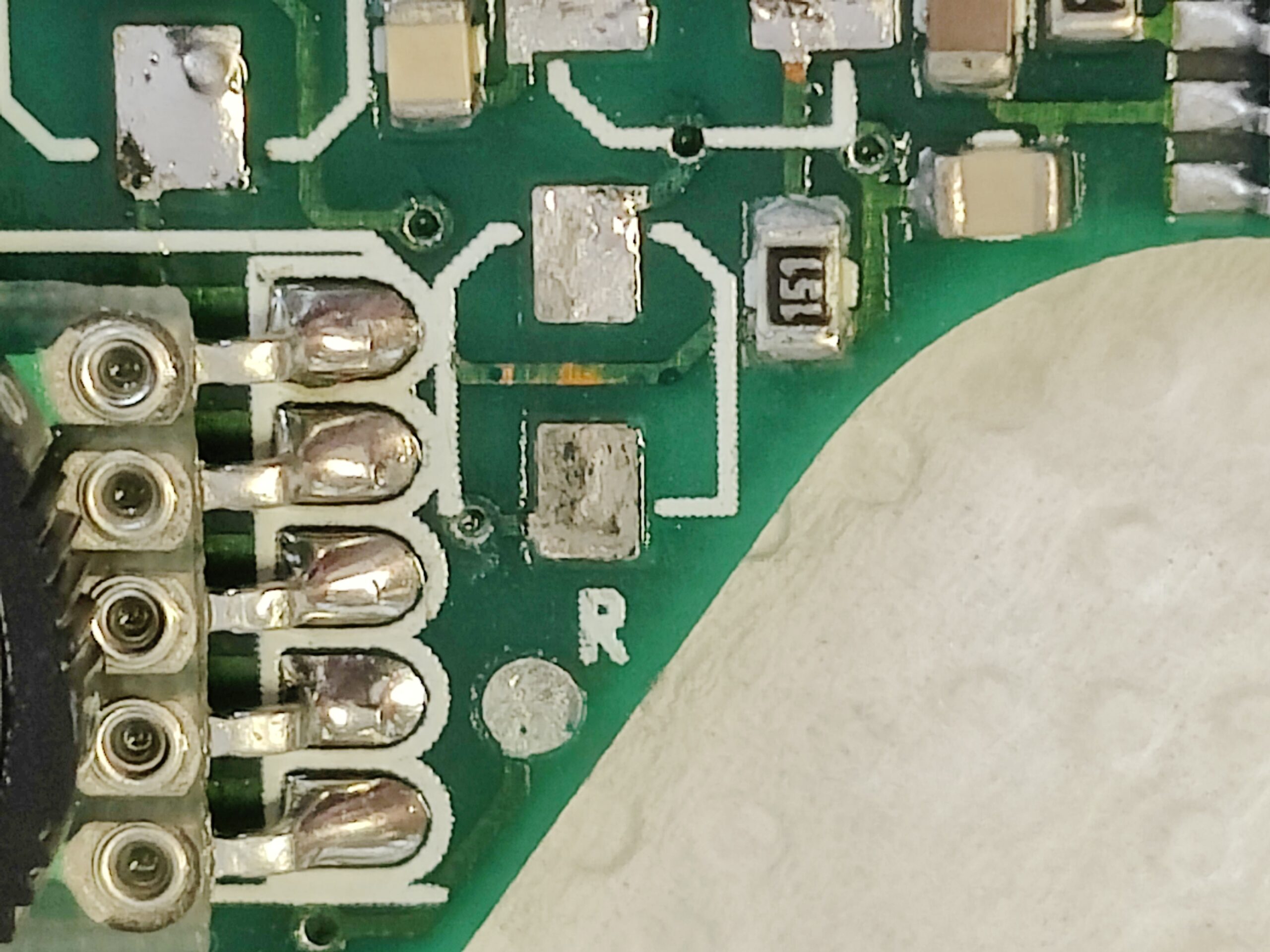
Die, wie es eben so ist, ausgelaufenen Batterien haben deutliche Spuren auf der Platine hinterlassen. Das bedeutet, es ist wieder eine aufwendige Reinigung der Platine notwendig, bis die Suche nach korrodierten Leiterbahnen beginnen kann.
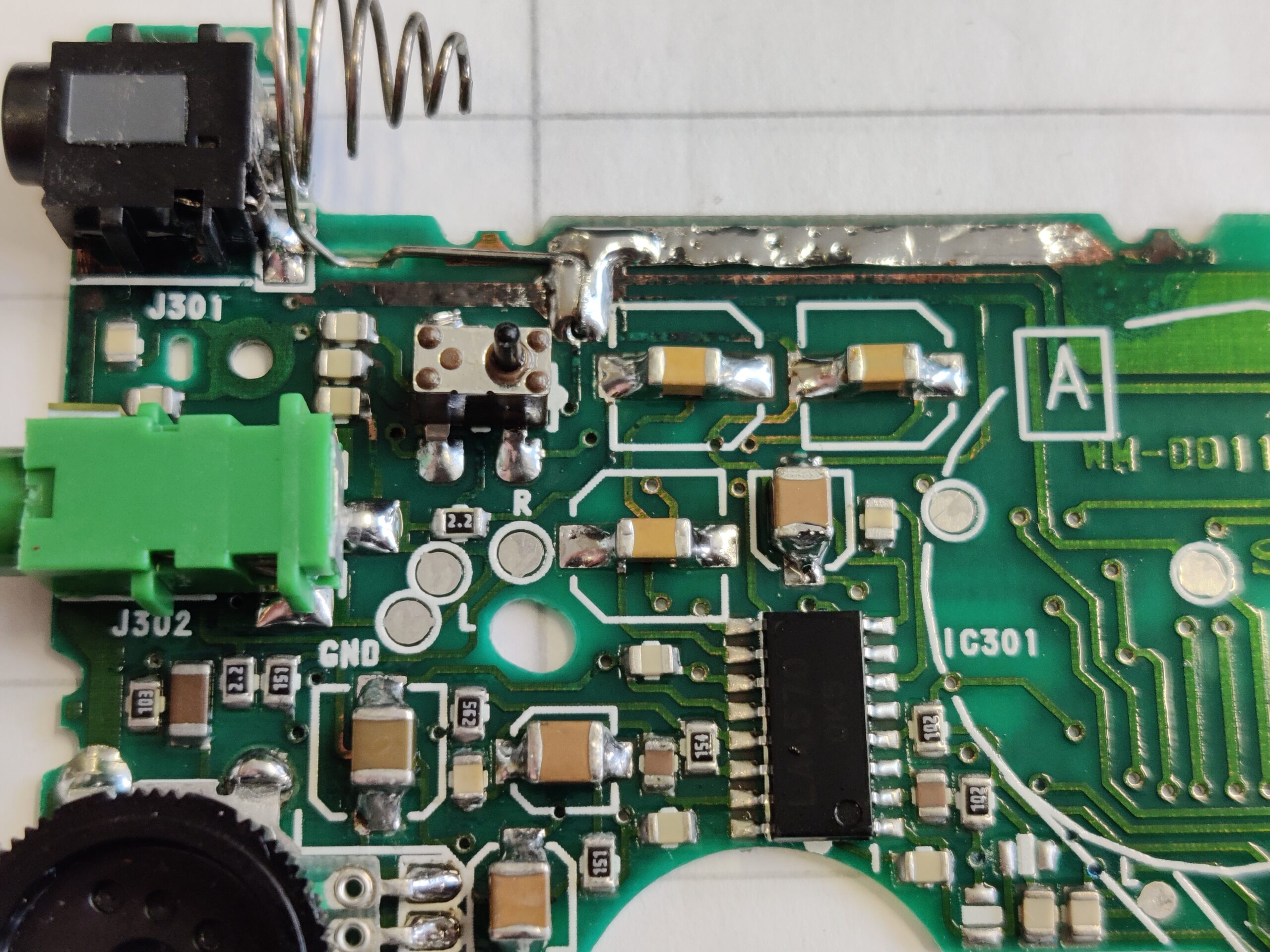
Nach der Reinigung und dem Entfernen der Batterieelektrolyte Reste, konnte ich ein paar defekte Leiterbahnen ausmachen. Diese sind glücklicherweise recht einfach zu reparieren. In den meisten Fällen genügt es, den Lötstoplack im defekten Bereich zu entfernen, die freigelegten Kupferbahnen zu verzinnen. Je nach Leiterbahnbreite wird die defekte Stelle der Bahn dann mit einzelnen Litzen oder Drähten wieder verbunden.
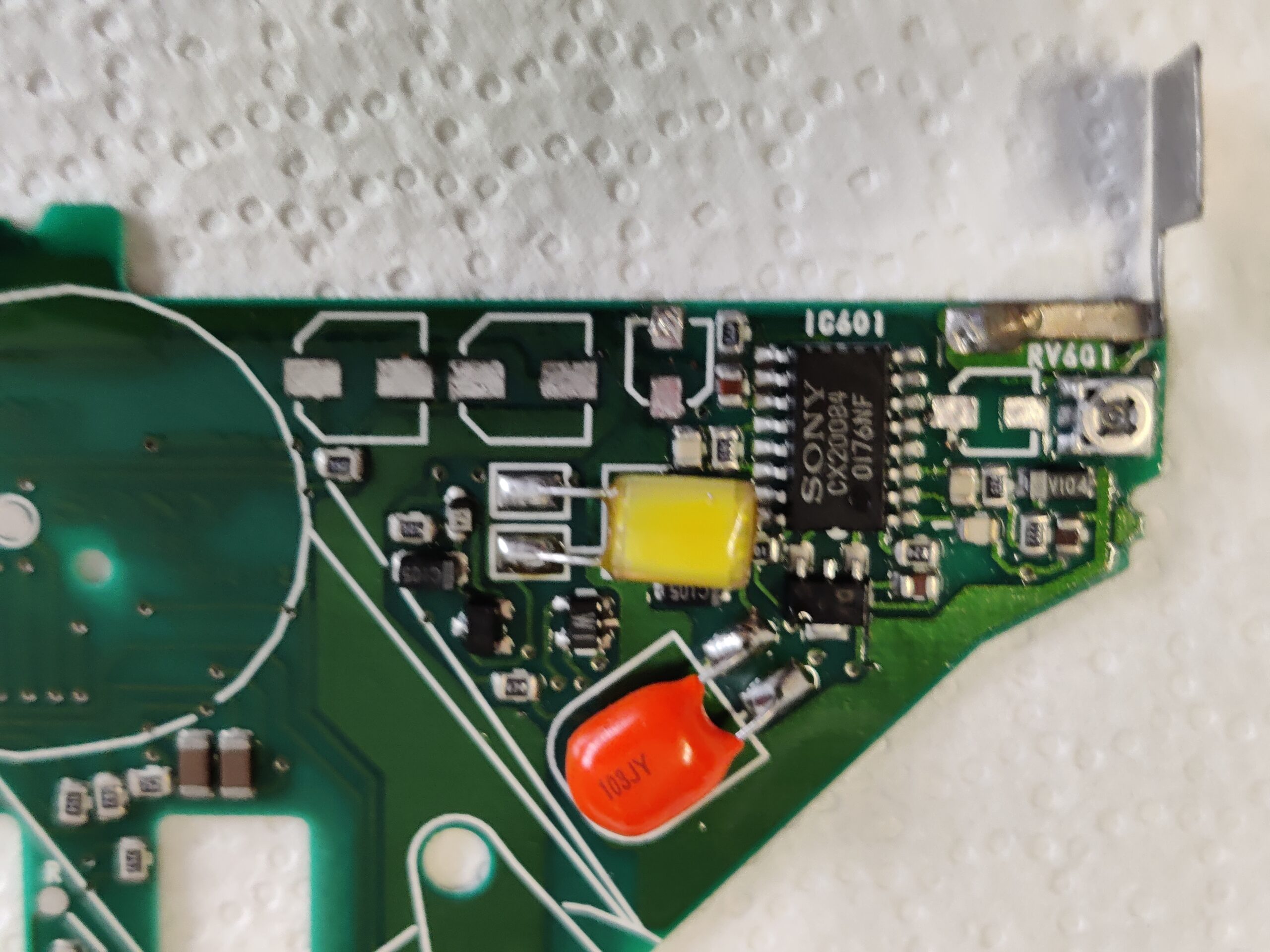
Jetzt ist es soweit, um nach einem provisorischen Zusammenbau einen ersten Funktionstest durchzuführen. Und wie beschrieben, arbeitet der Capstan Antrieb, das Band wird transportiert – aber aus den angeschlossenen Lautsprechern kommt keinerlei Geräusch. Jetzt ist es Zeit sich die Fehlerquelle Nummer Eins anzusehen – die alten Elektrolytkondensatoren. Davon sind auf dem Board elf Stück verbaut.
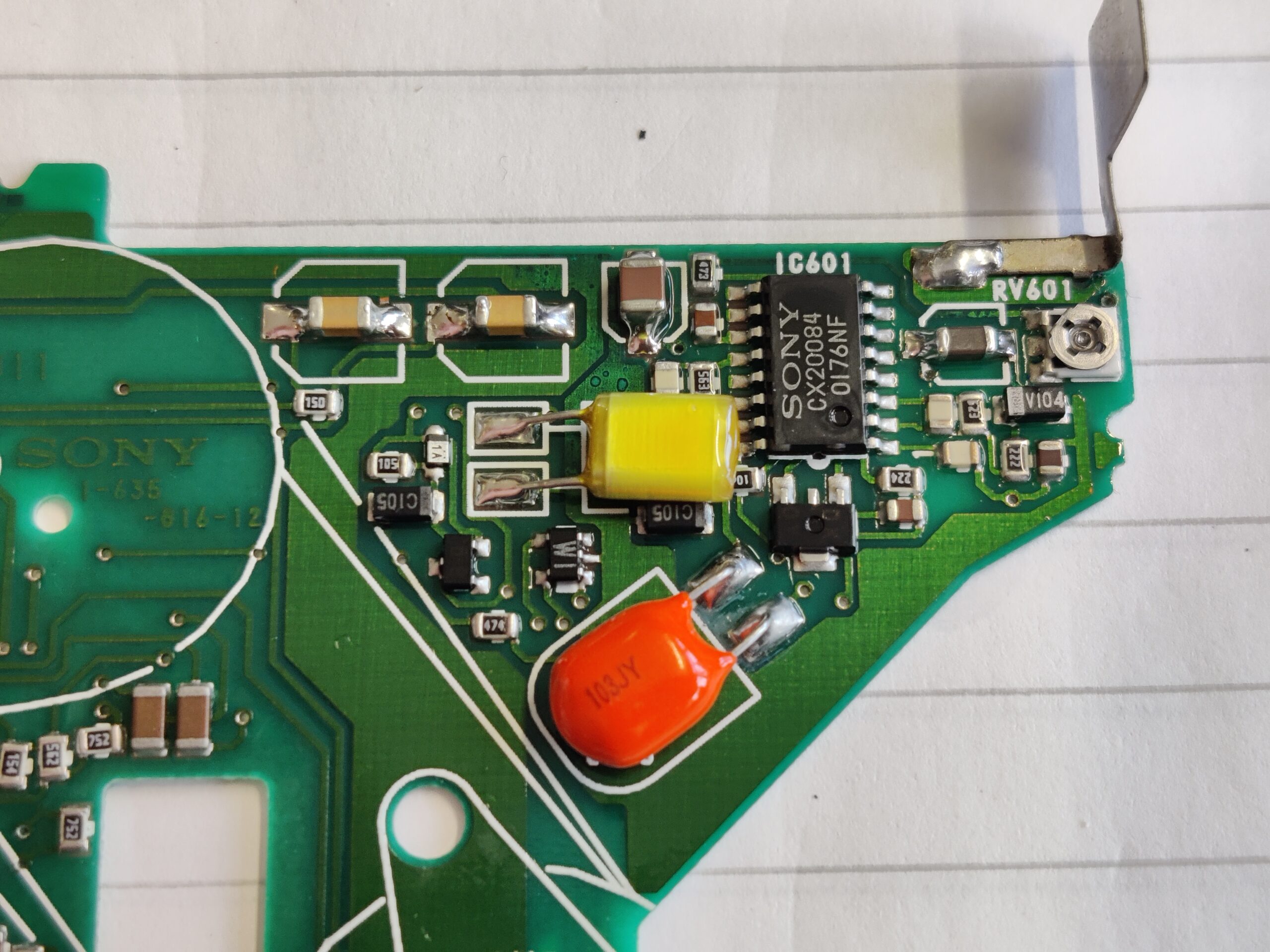
Schon beim Ausbau des ersten Elkos für einen Kapazitätstest, stieg mir wieder einmal der alt bekannte Fischgeruch in die Nase. Wie erwartet war die Kapazität des Kondensators auch weit unter dem des Nominalwertes. Also habe ich kurzentschlossen alle elf Elkos ausgebaut um einen Flächentausch vorzunehmen. (modernsprachlich nennt man das „recap“ 😀 )
Ich ersetze die SMD-Elkos gerne durch SMD Vielschichtkondensatoren, da diese mittlerweile auch bei sehr kleinen Bauformen in hohen Kapazitäten mit passender Spannungsfestigkeit erhältlich sind.
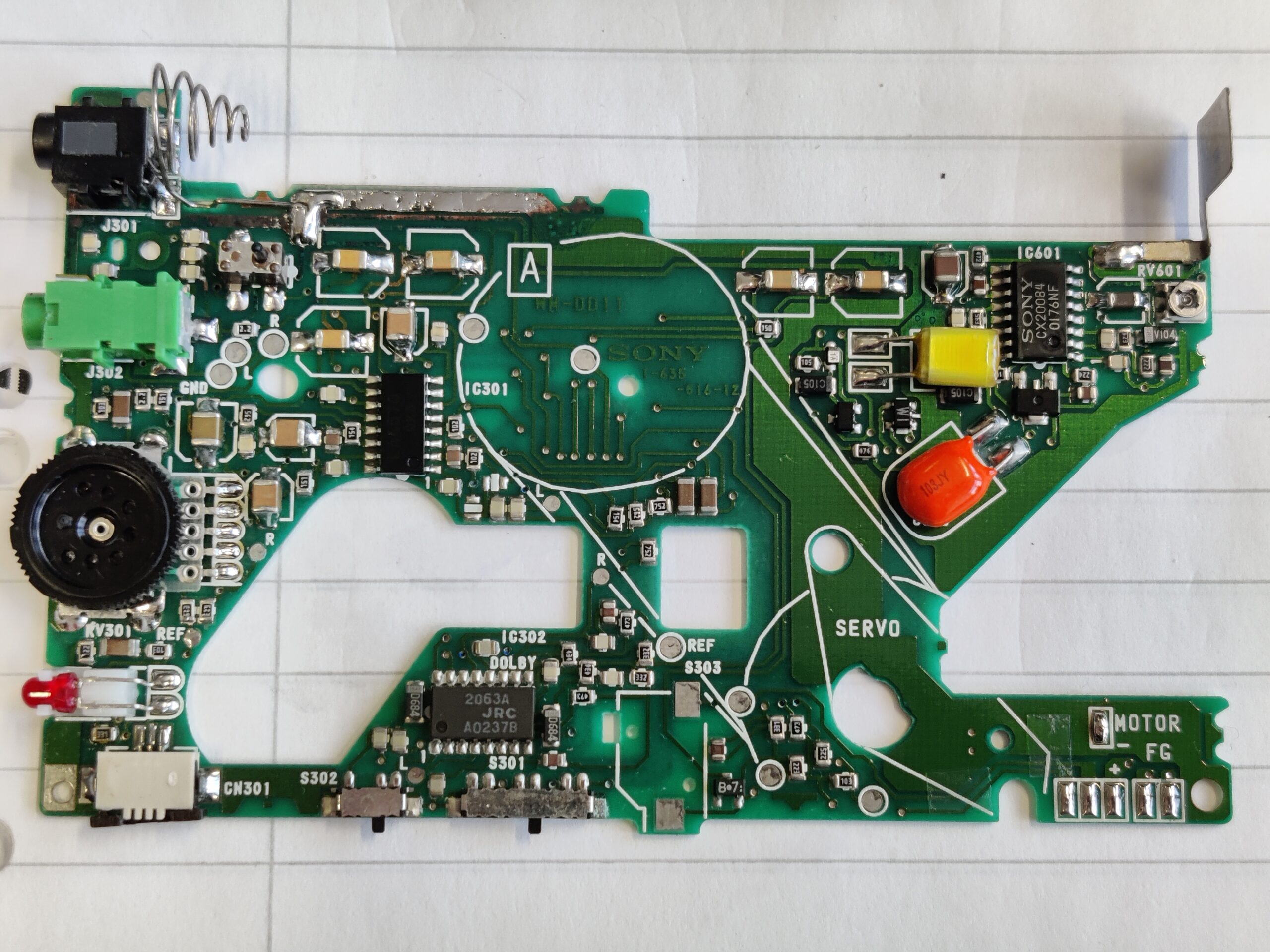
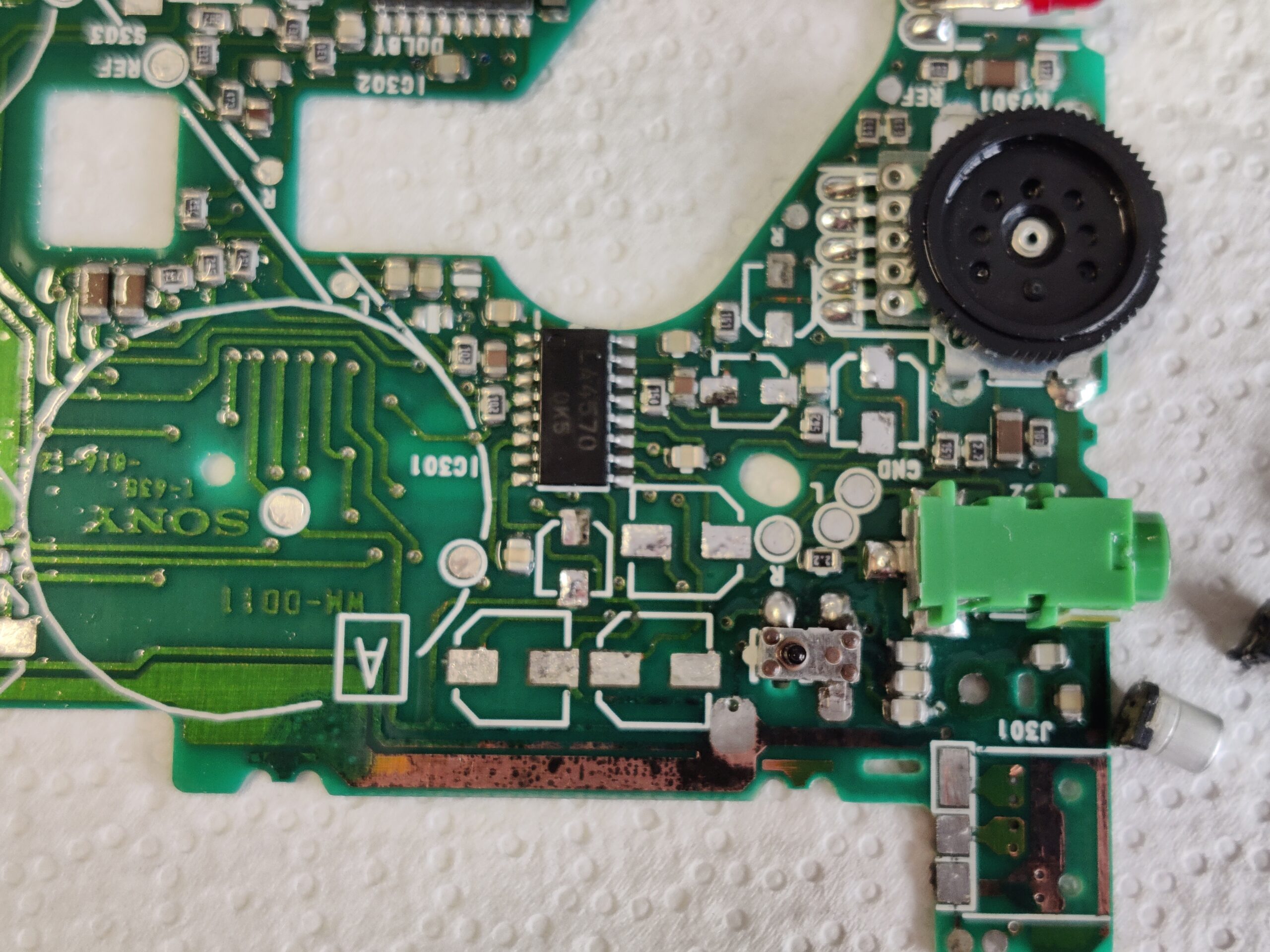
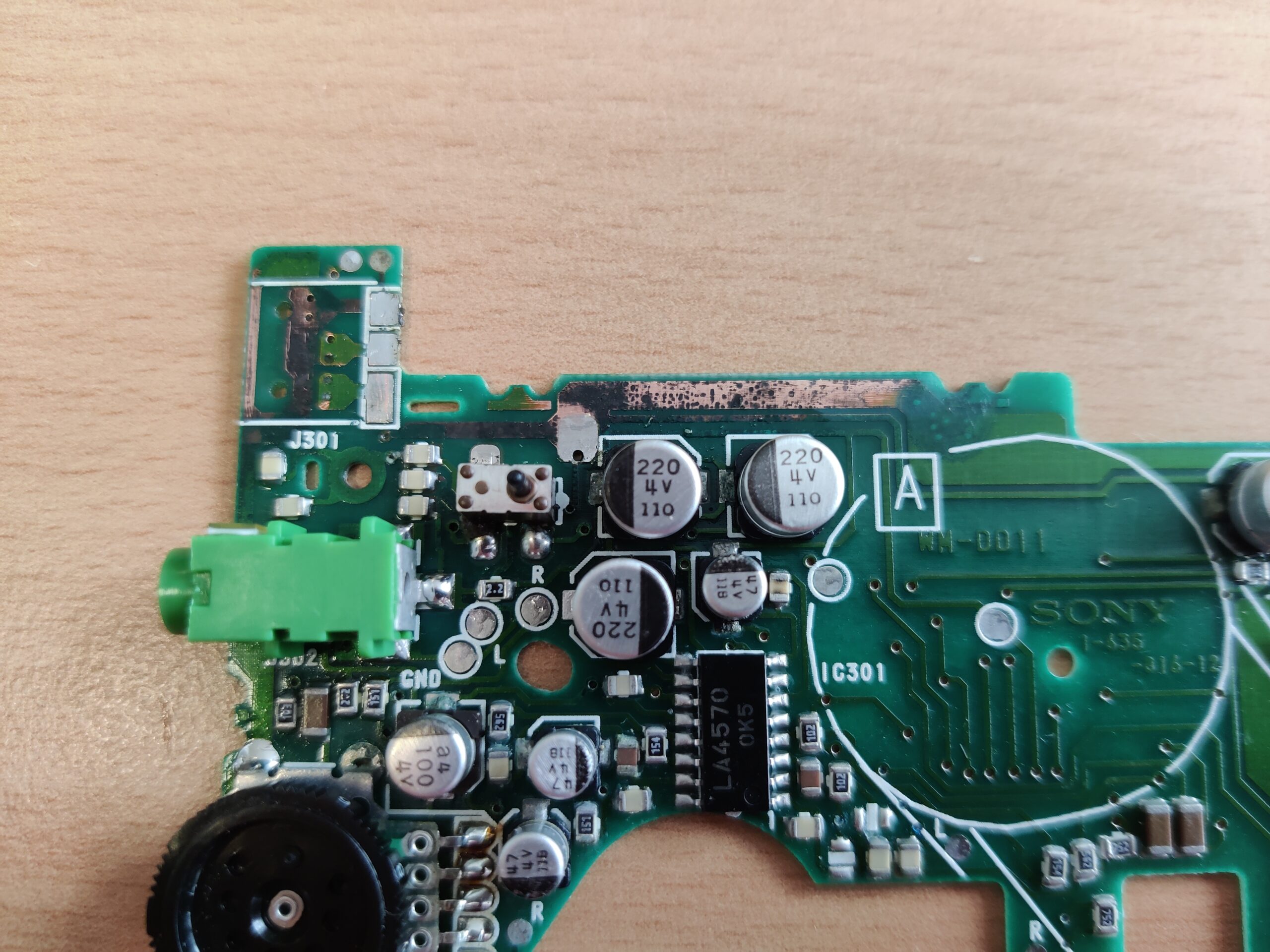
Nach dem Erneuern sieht das Board wieder ganz ansehnlich aus. Eine wiederholte provisorische Inbetriebnahme zeigt, dass sich der Aufwand gelohnt hat. Die Musik auf dem eingelegten Band ertönt in erwarteter Qualität. Im nächsten Schritt ist jetzt noch ein Kalibrieren oder Justieren der Bandgeschwindigkeit notwendig. Dazu benötigt man ein Referenzband. Ich hatte mir vor Jahren einmal eines mit einem sehr guten Tape Recorder aufgenommen. Die Aufnahme besteht aus einem 1kHz und einem 5kHz Sinuston. Diese Band dient jetzt im DD11 als Referenz. Dazu wird der Ausgang des DD11 mit einem Frequenzzähler oder Oszilloskop verbunden und während des Abspielens mit dem Trimmpotentiometer so lange justiert, bis die 1000Hz bzw. 5000Hz am Oszilloskop exakt zu sehen sind.
Jetzt kann der Walkman wieder zusammengebaut werden. Alle Schrauben wieder ordentlich festgezogen und abschließend nochmals die Funktion getestet und das schöne Stück kann in die Vitrine…
Vor ein paar Jahren habe ich ein Projekt vorgestellt, in dem ein Raspberry Pi als Datenlogger arbeitete. An diesen Raspberry waren ein paar Sensoren angeschlossen, die Umweltdaten, wie Lufttemperatur, relative Luftfeuchte, den Luftdruck und auch die aktuelle GPS Position aufzeichneten. Die Sensoren bestanden größtenteils aus fertigen Breakoutboards, die über die diversen Busse (I²C, Serial, SPI…) an den RaspberryPi angeschlossen waren. Am PI selber liefen Python Skripten, die das Auslesen der Sensoren übernahmen, die Daten zusammenfassten und auf einen USB-Flashspeicher ablegten. Dieses Sammelsurium an Komponenten hatte ich dann in eine Kunststoffbox mit einer Größe von 150x80x50mm eingebaut.
Doch es geht auch um einiges kleiner. Im Rahmen eines kleinen Projektes war es die Aufgabe, diesen Sensor/Datenlogger zu verkleinern. Mein Ansatz, das zu realisieren, war ganz einfach: „Alles neu“. So habe ich das Konzept folgendermaßen geändert:
der RaspberryPi wird durch einen Microcontroller ersetzt
es wird eine Platine erstellt, auf der sämtliche Komponenten untergebracht sind
die erfassten Daten werden auf einer MicroSD Karte gespeichert
das Board ist auf die wesentlichsten Komponenten reduziert. Die Sensorelektronik und der SD-Card Reader wird direkt auf dem Board platziert
ein GPS-Empfänger (in Form eines Breakoutboards) soll optional aufgesteckt werden können
die Programmierung des Controllers wird durch eine ISP Schnittstelle durchgeführt
die Spannungsversorgung beträgt 5V DC
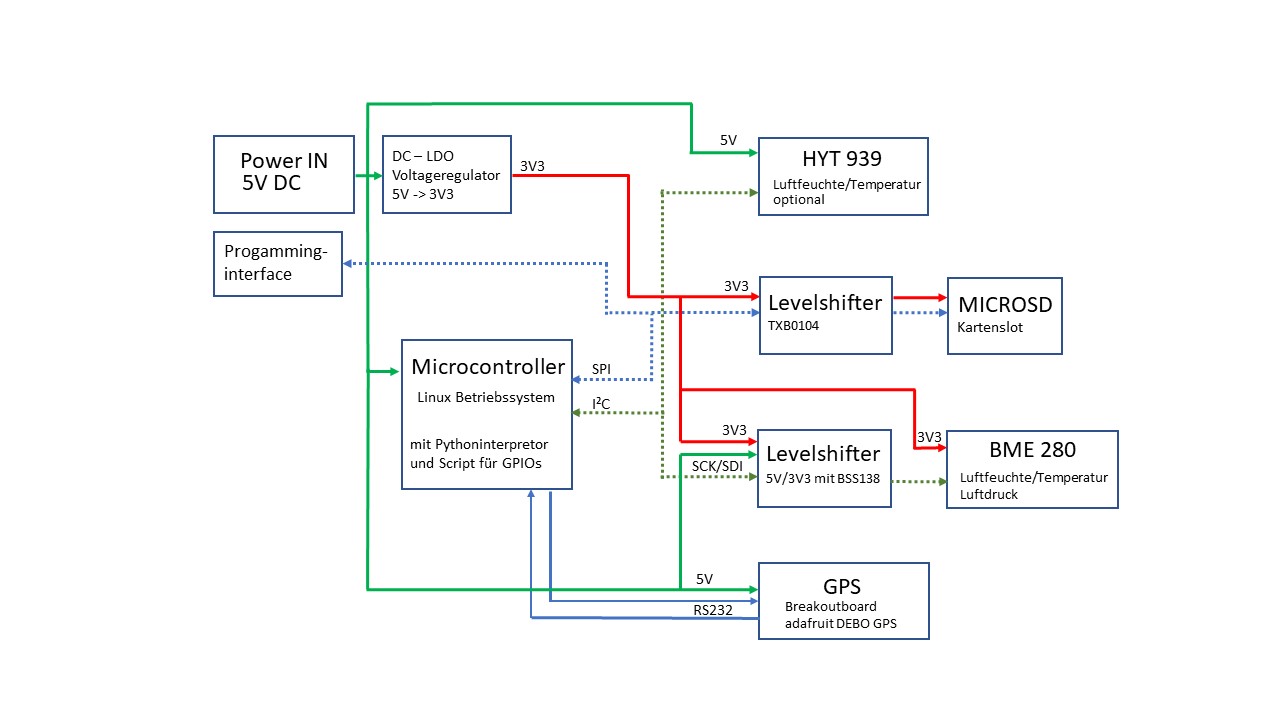
Daraus habe ich folgendes Blockschaltbild erstellt:
Blockschaltbild
Das zentrale Element ist, wie so oft, der Microcontroller Atmega328. Er benötigt als externe Beschaltung lediglich einen Quarz als Taktstabilisierung. (genauer gesagt bietet er aber auch die Optionen interne Oszillatoren zu benutzen…) Der Microcontroller kommuniziert über den I²C Bus mit den Sensoren HYT939 und BME280. Über die ausgeklügelte bidirektionale Levelshifter Schaltung mittels BSS138 Mosfet mit integrierter Body Diode wird die Anpassung der Pegel von 5V auf der Controller Seite zu den 3,3V auf der Sensorseite realisiert. Diese Schaltung wird sowohl für die SCL- (Serial Clock), als auch für die SDA-Leitung (Serial Data) angewendet.
Die Datenspeicherung findet auf einer MicroSD-Karte statt. Dafür wird ein Card Slot verbaut, der per SPI (Serial Peripheral Interface) mit dem Controller kommuniziert. Auch hier ist eine Anpassung der Signalamplituden notwendig. Das übernimmt dieses Mal jedoch der Chip TXB0108 von Texas Instruments. Das ist ein 8Bit Bidirektionaler Levelshifter.
Ein Taster wird die Datenaufzeichnung starten und stoppen und eine LED soll diverse Statusmeldungen durch Blinkfolgen darstellen.
Das optional aufsteckbare GPS Modul arbeitet mit 5V Spannungsversorgung und die Pegel der seriellen Datenkommunikation (RS232) sind ebenfalls 5V kompatibel.
Zu guter letzt ist natürlich auch die Spannungsversorgung zu planen. Hier soll lediglich eine externe, stabilisierte 5VDC Quelle angeschlossen werden, um den Logger zu versorgen. Die für die Sensoren und SD-Card benötigten 3,3VDC werden am Board mittels einem LDO (Low Drop Out) Regler erzeugt.
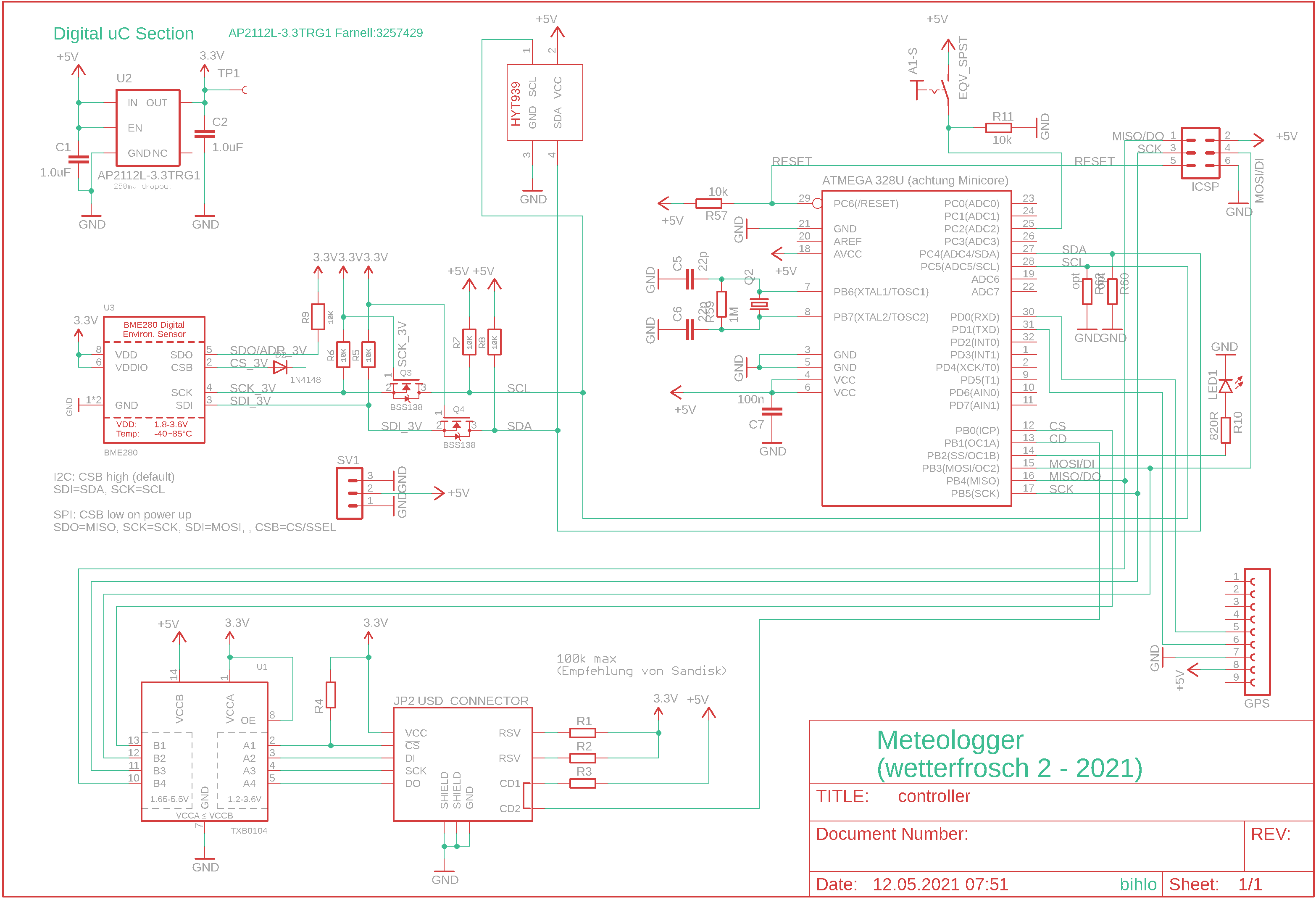
Sind alle Komponenten und deren Zusammenspiel definiert, dann wird daraus der Schaltplan gezeichnet. Für meine Bastelprojekte verwende ich hauptsächlich den Schaltplan- und Layout Editor „Eagle“. Aus dem Blockschaltbild ergibt sich die unten abgebildete Schaltung.
Aus dem Schaltplan habe ich ein Layout mit zwei Layern erstellt, dessen Grundriss die Abmessungen 55x25mm hat. Bis auf die Steckverbinder befinden ausschließlich SMD Komponenten auf dem Board.
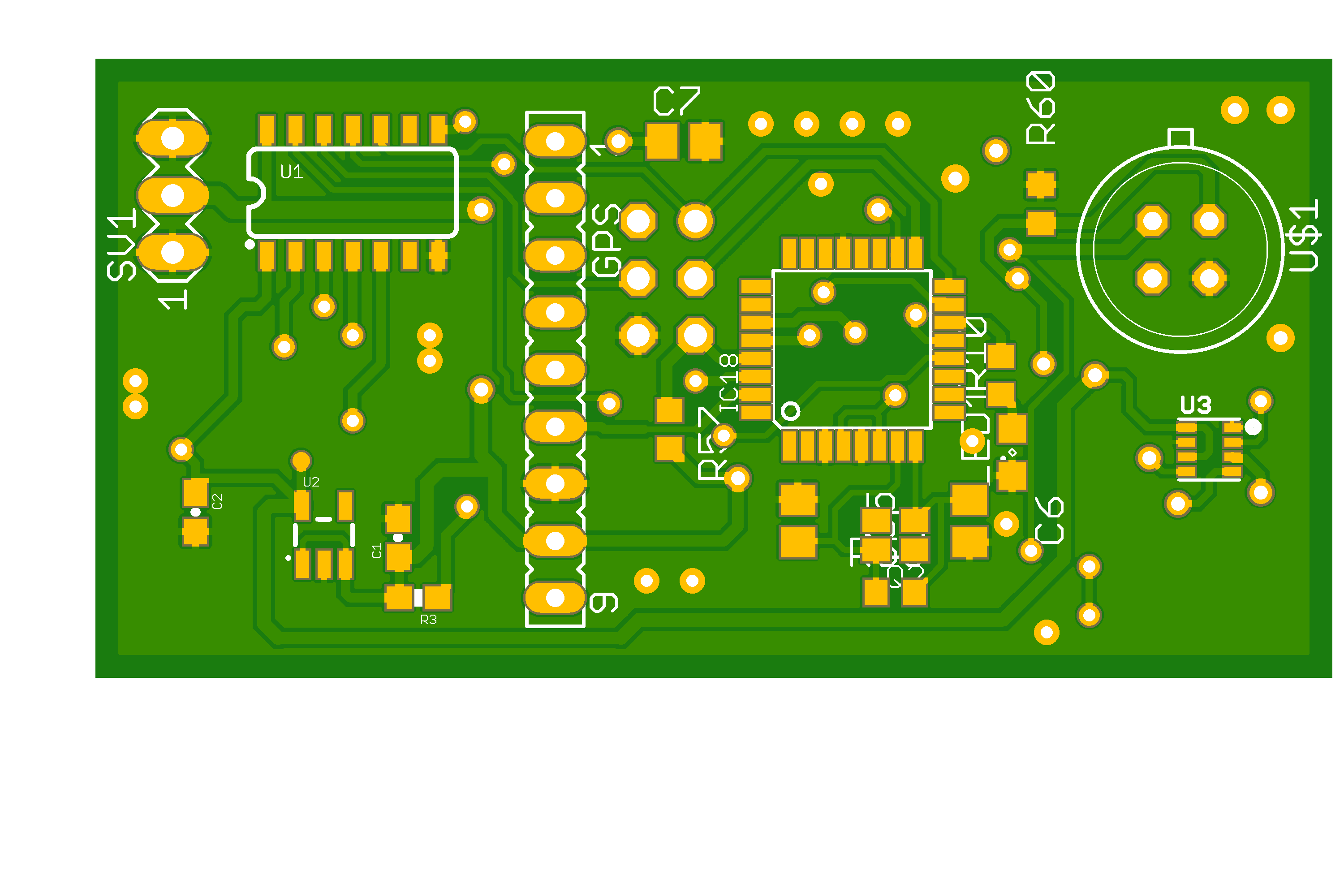
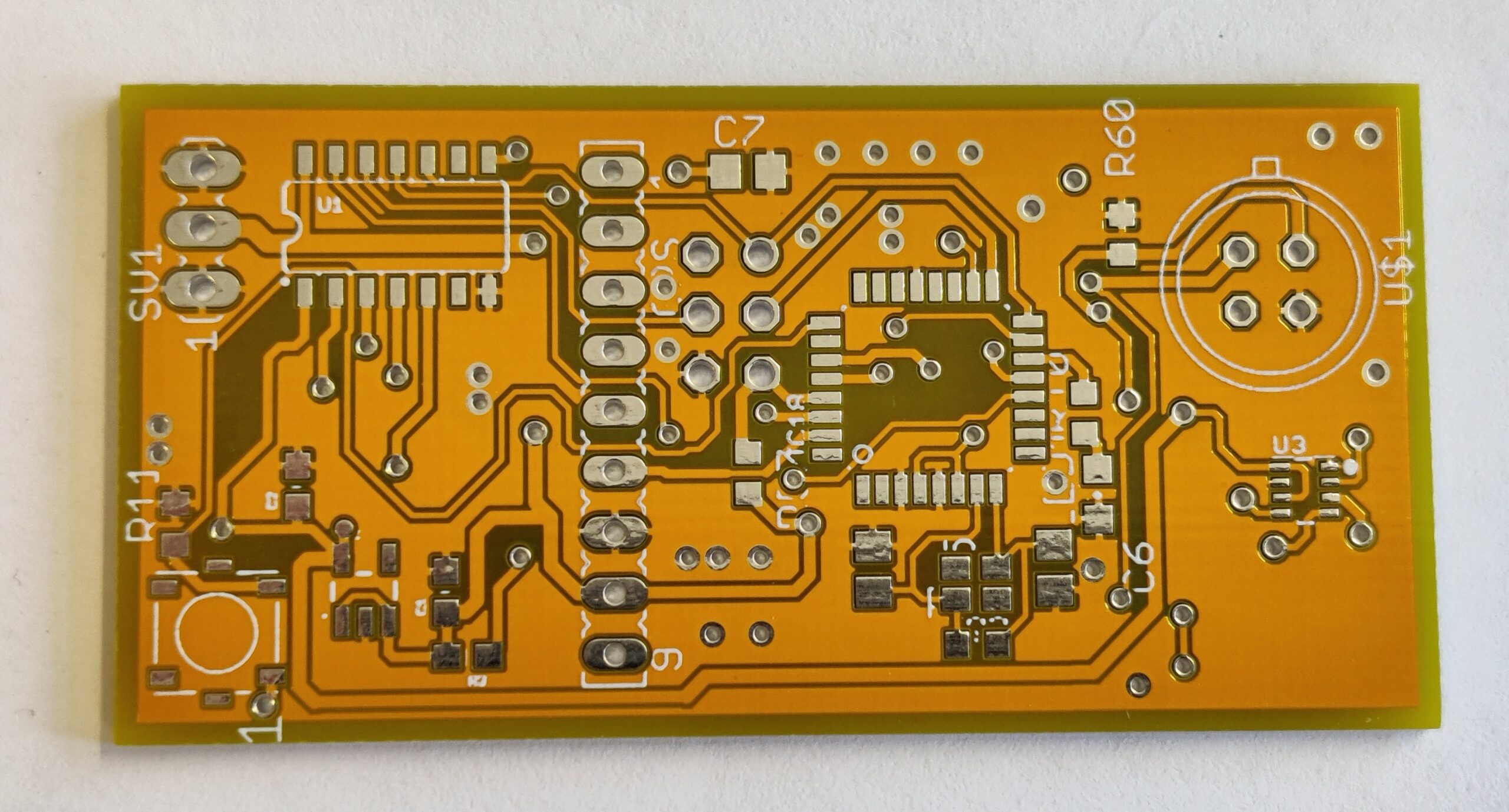
Im Layout Tool gibt es die Funktion, eine optische Vorschau der gefertigten Platine zu betrachten. So kann man vorab überprüfen, ob die Platine den Vorstellungen entspricht und gegebenenfalls die Lage der Bauteile optimieren. Ist das erledigt, wird aus dem Design ein Paket mit Produktionsfiles (Gerberdateien) erzeugt und das dann dem Platinen Hersteller seines Vertrauens gesendet. Da der auch sehr, sehr weit weg angesiedelt ist, dauert die Produktion auch ein paar Tage. Aber schlussendlich kommen die Platinen an und können sich auch sehen lassen.
Die beiden Bilder oben zeigen die Platine von der TOP und der BOTTOM Seite. Der nächste Schritt besteht darin, die Komponenten entsprechend der Planung zu bestellen und danach zu bestücken.
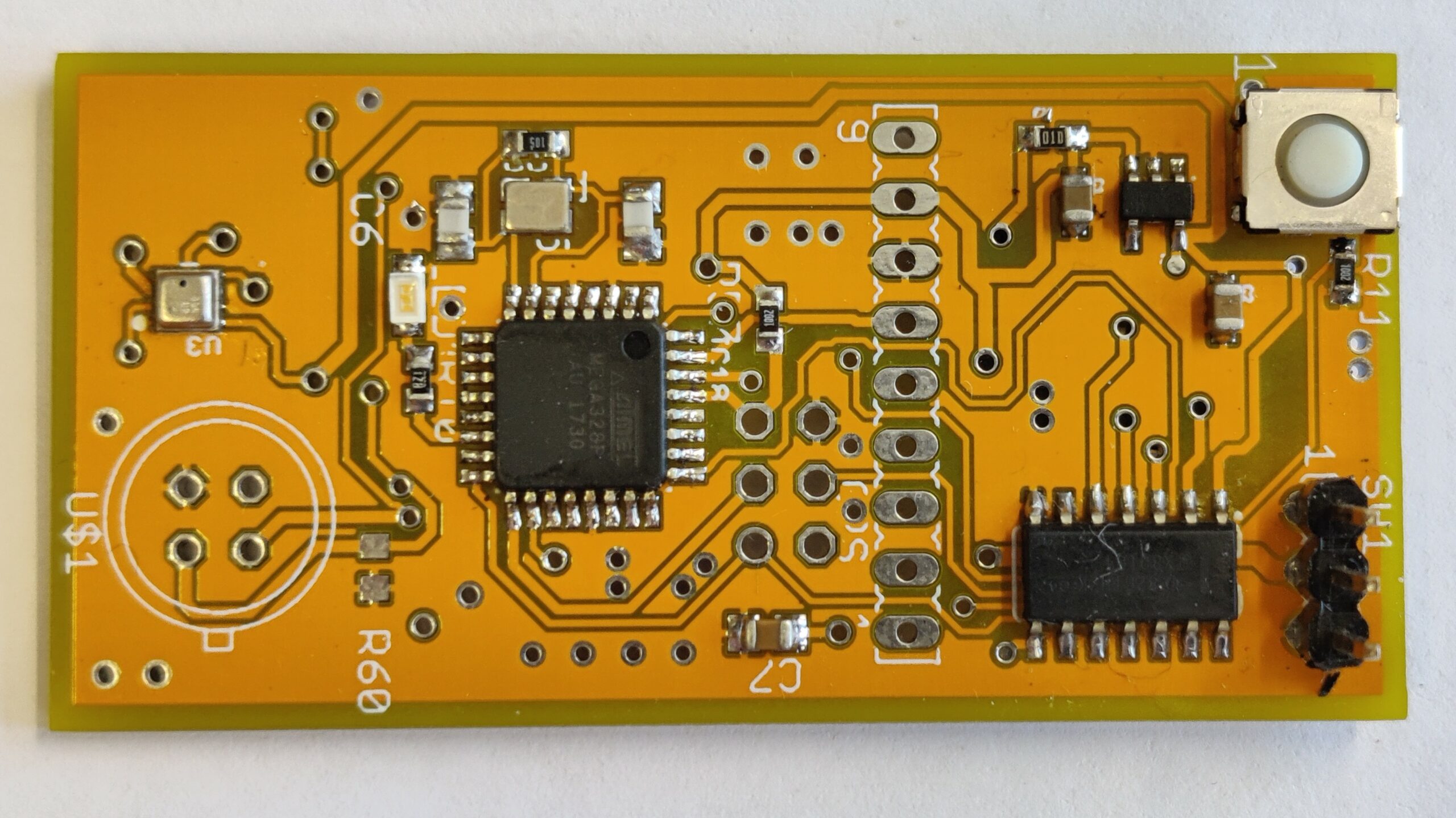
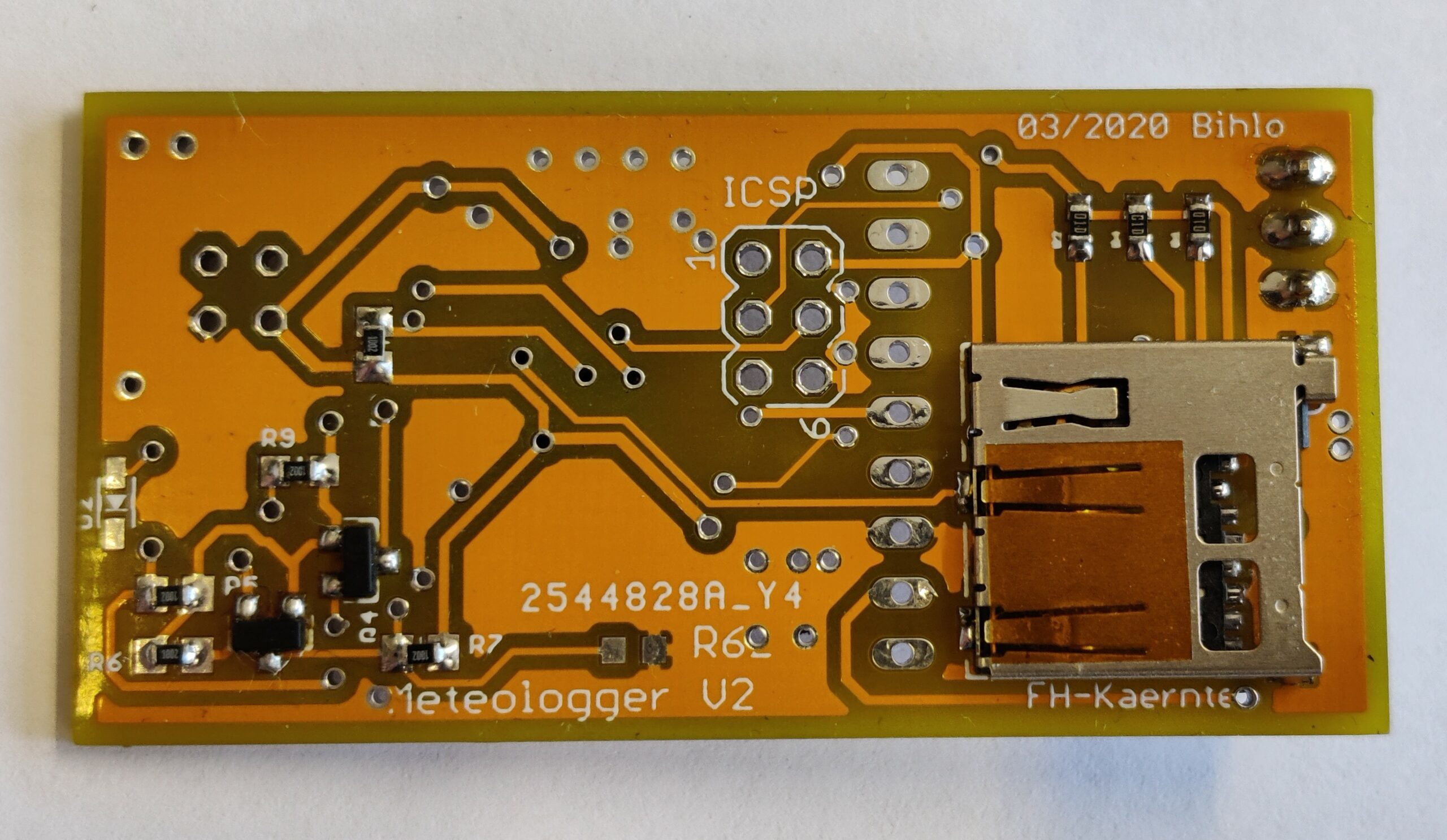
Die Bestückung erledige ich per Hand mit einem, für die SMD-Komponenten geeigneten Lötkolben mit entsprechend kleiner Spitze. Für die ganz kleinen Teile, wie den BME280 Sensor, kommt auch noch ein Mikroskop, bzw. eine Mikroskop Kamera zum Einsatz.
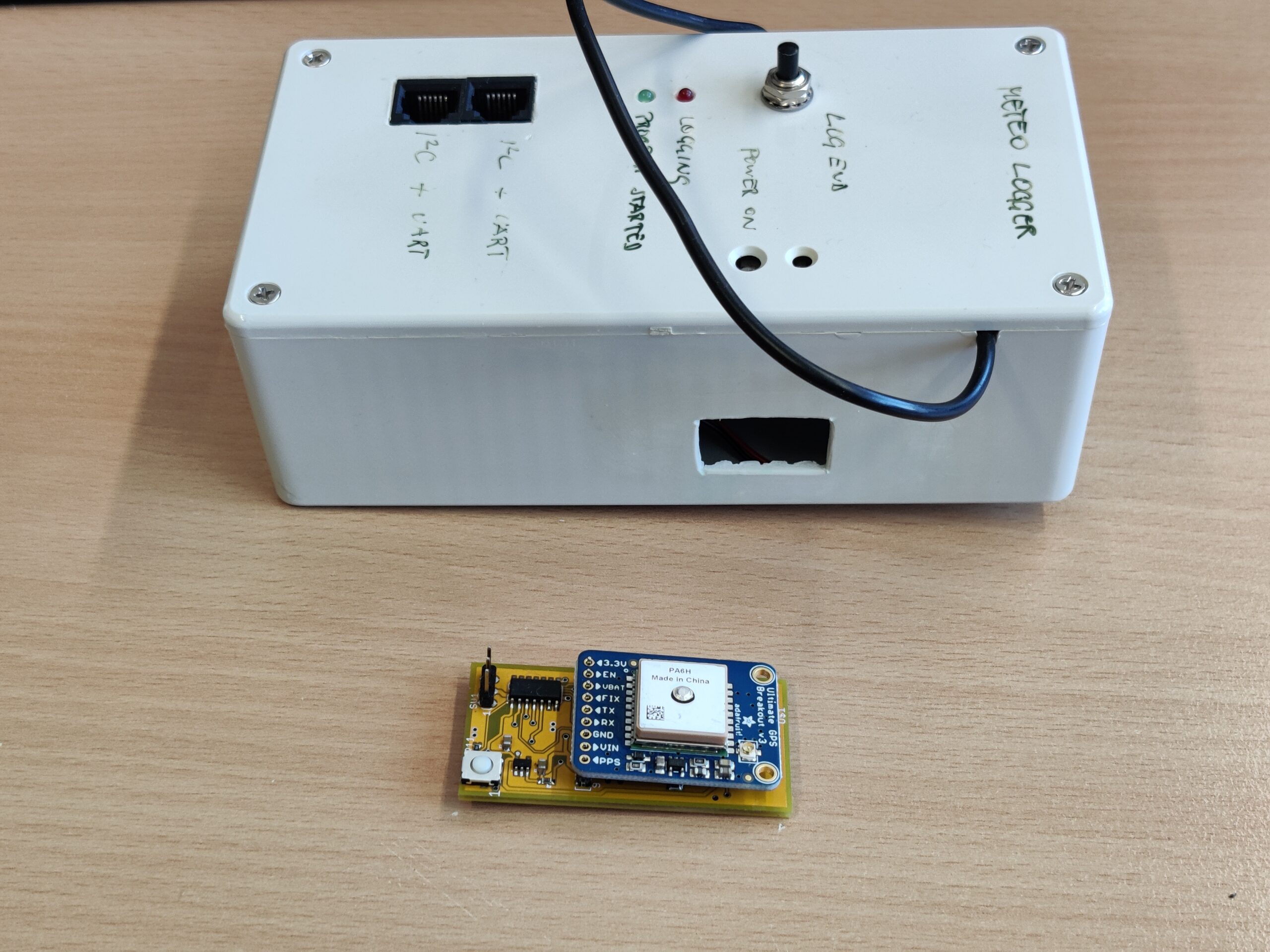
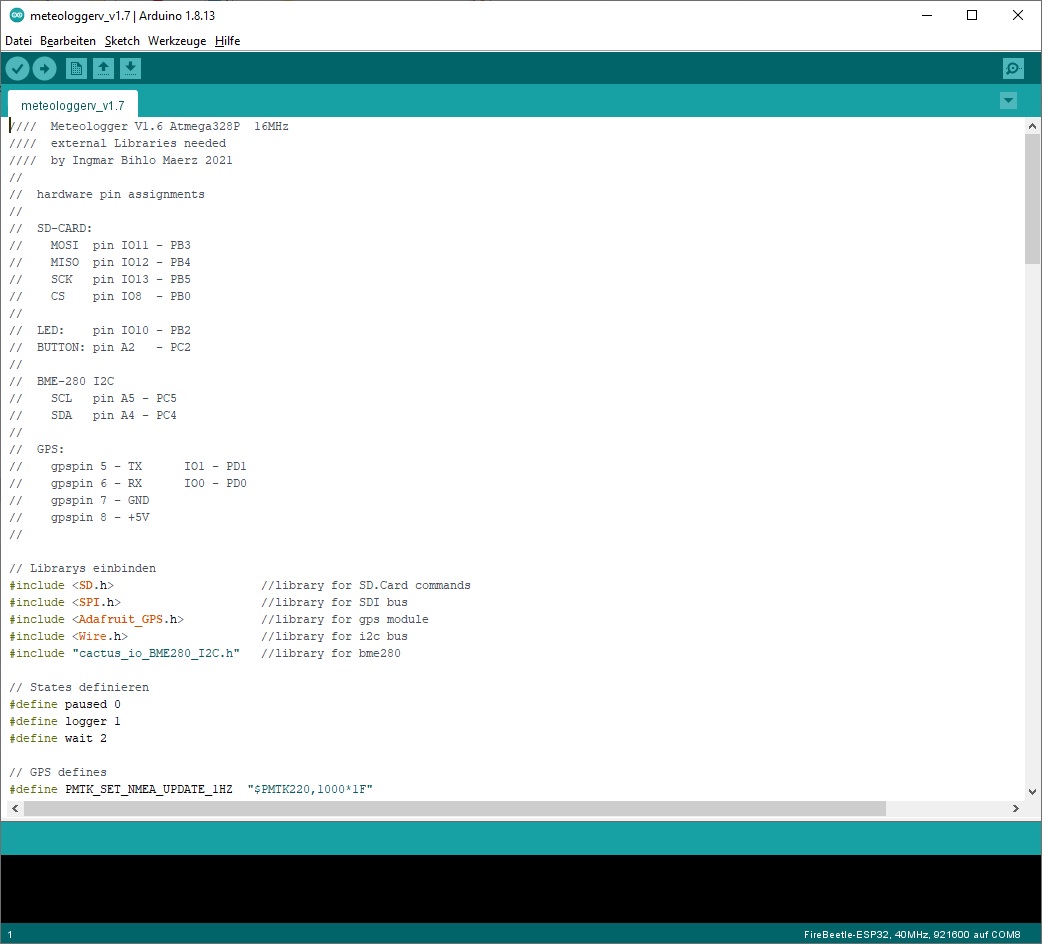
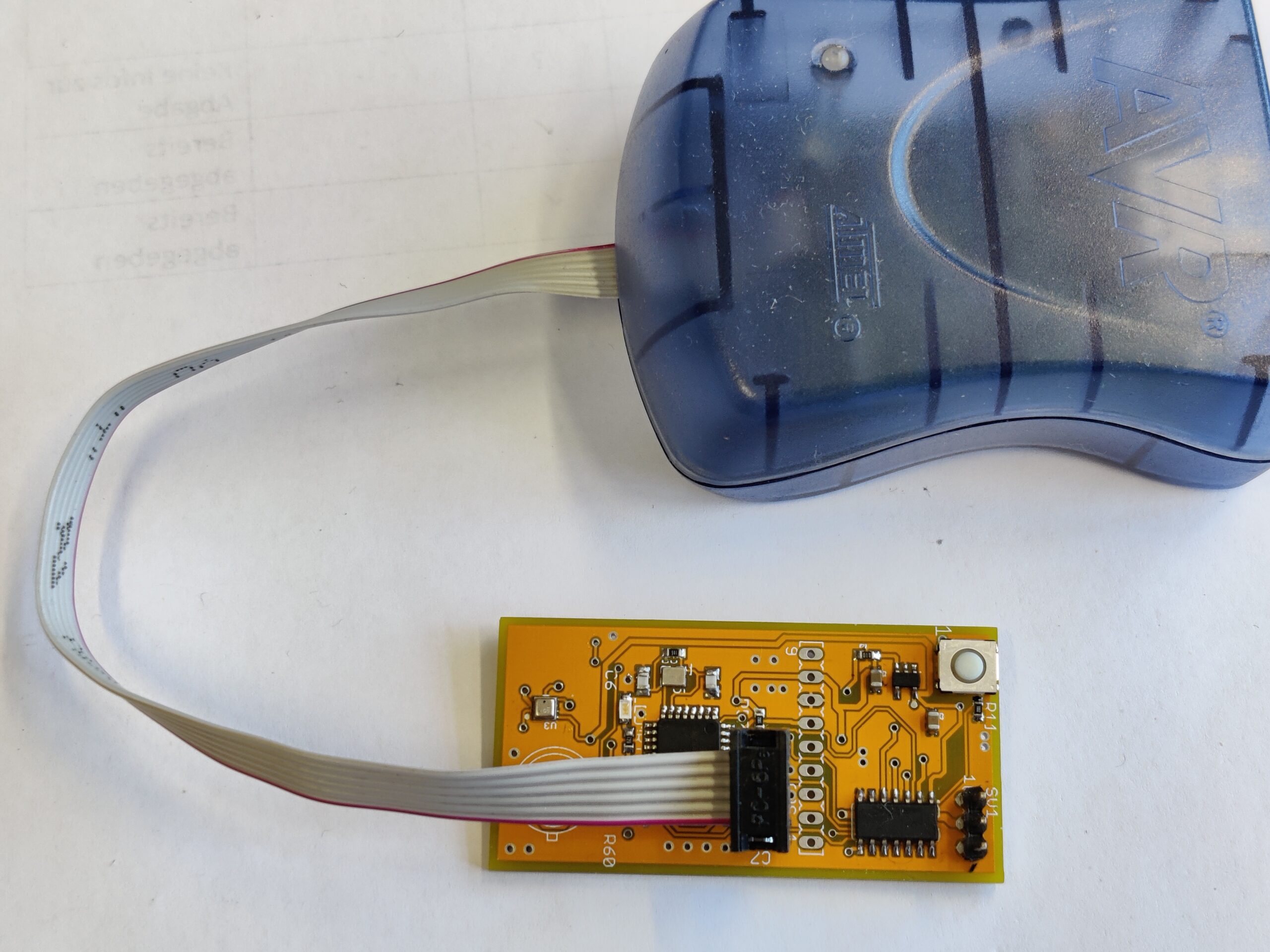
Wie die Platine nach der Bestückung aussieht, zeigen die beiden Bilder oben. Das folgende Foto zeigt den Größenunterschied des fertigen Loggers mit dem aufgesteckten GPS Modul im Vergleich zum alten „Wetterfrosch“Nach der Fertigstellung der Hardware, geht es nun an die Software. Die habe ich praktischer Weise mit dem Arduino IDE Tool gebastelt und per AVRISP mk2 über ISP auf den Controller geflashed. Um den AVRISP auf einem Windows 10 Rechner zum Laufen zu bekommen, muss ein geeigneter Treiber installiert sein. (hier hilft libusb-win32-1.2.6.0)
Programmcode mit der ArduinoIDE erstelltController mit AVRISPmkII geflashed
Auf der SD-Karte wird nach Anlegen der Versorgungsspannung und nach Betätigen des Tasters die Datenaufzeichnung gestartet. Die Messwerte werden im Sekundentakt geschrieben. Wenn, wie in diesem Beispiel der GPS-Sensor gesteckt ist, so werden auch die GPS Daten mit aufgezeichnet. Die Software zeichnet auch auf, wenn der GPS Sensor noch keinen „fix“ hat. (Da in dem Beispiellog unten noch kein GPS-Fix vorhanden war, sind auch keine gültigen GPS Daten enthalten.)
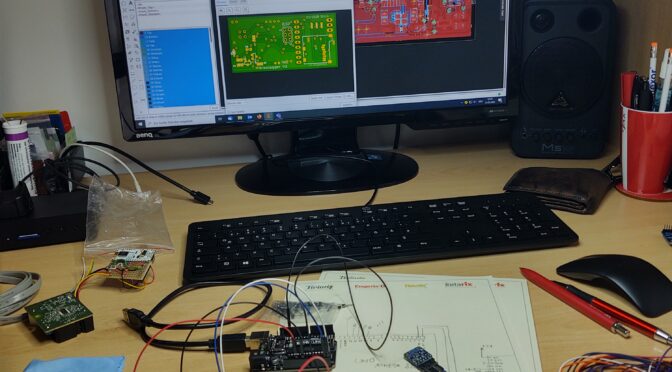
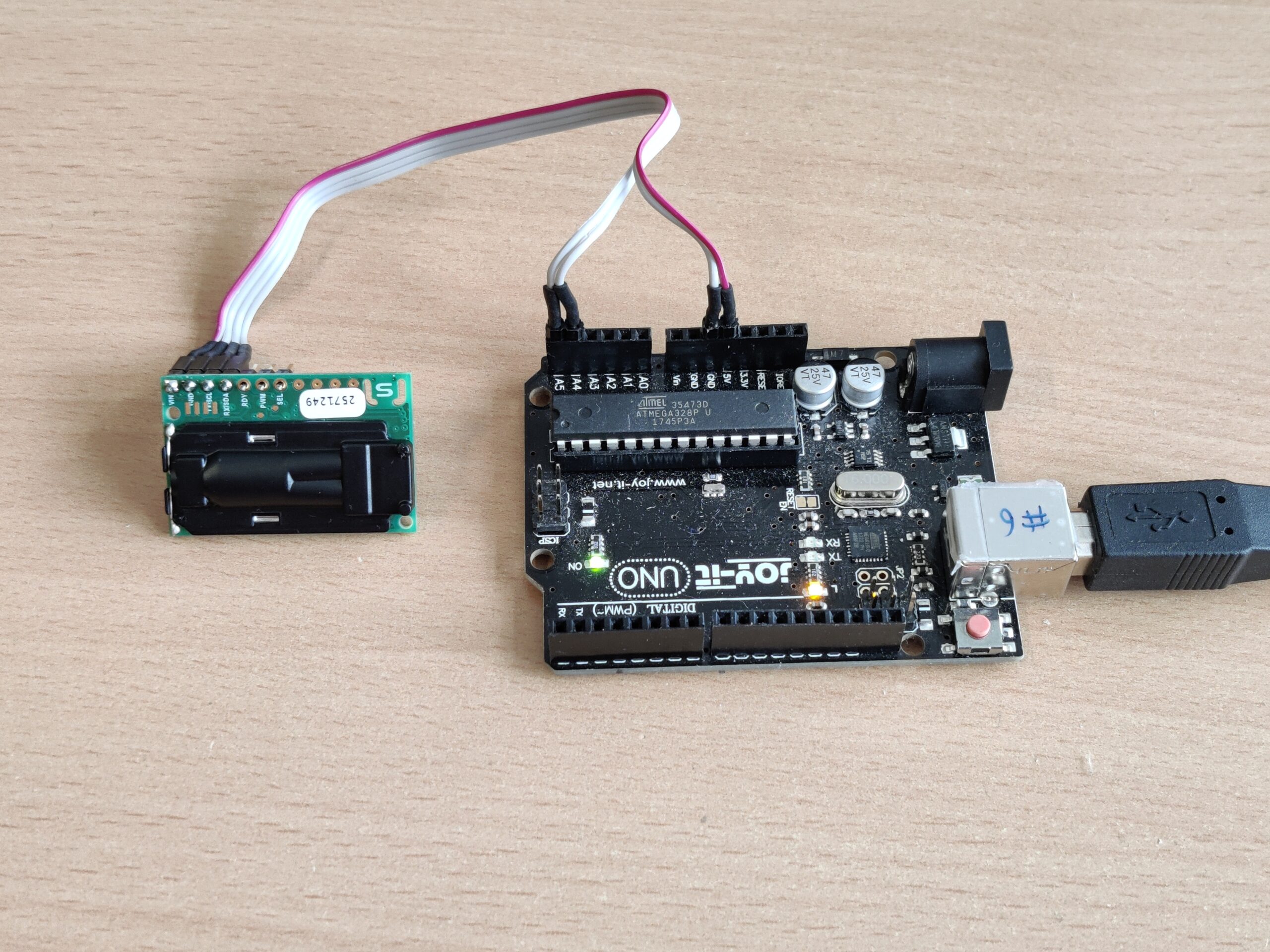
Dieses Projekt – eigentlich Miniprojekt – könnte vielleicht auch für den einen oder anderen interessant sein. Es handelt sich um den mittlerweile bekannten und häufig verwendeten Kohlendioxid Sensor SCD30 (CO2-Sensor) des Herstellers Sensirion. Es gibt etliche Projekte die man dazu im Netz findet. Im Rahmen eines schnellen Testaufbaues habe ich versucht, die Daten des Sensors mithilfe eines Arduino Uno Boards auszulesen, um sie dann mit der Software Matlab in einem Plot darzustellen. Die Datenübertragung erfolgt über die Serielle Schnittstelle bzw. über serielles Protokoll des USB-UART.
Um den SCD30 am Arduino anzuschließen, benötigt man die Spannungsversorgung und den I²C Datenbus – also in Summe gerade einmal vier Drähte. Damit ist die minimale Konfiguration erfüllt und die Daten können ausgelesen werden.
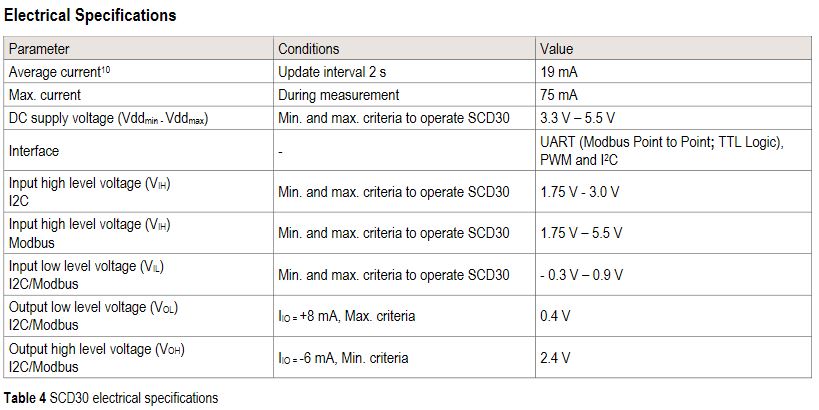
Der Sensor selbst arbeitet nach dem Prinzip der NDIR Technologie. (NDIR = non-dispersive-infrared). Das bedeutet, der Sensor ist also ein kleines Spektrometer. Hierbei wird das zu untersuchende Medium in eine Probenkammer geleitet. Die Probenkammer wird von einer Infrarotquelle durchleuchtet und das IR-Licht durchstrahlt das Medium und einen sehr schmalbandigen Wellenlängenfilter und trifft dann auf den IR-Detektor auf. Die Wellenlänge des Filters ist dabei so ausgelegt, dass genau diejenigen Wellenlängen durchgelassen werden, die von den Molekülen des Mediums (Gases) absorbiert werden. Je nach Anzahl der Moleküle, oder Dichte des Gases, werden entsprechend weniger Lichtstrahlen vom Detektor erkannt. Eine zweite Messkammer, die mit einem Referenzgas gefüllt ist, dient dabei als Referenz. Ein Controller am Sensor wertet diese Informationen aus und gibt sie in Form von ppm über die I²C (oder umschaltbar auch MOD-Bus) Schnittstelle weiter. Zusätzlich befindet sich auch ein Temperatur und Luftfeuchtesensor am Board, deren Daten ebenso über den Bus ausgelesen werden können. Die voreingestellte I²C Adresse des SCD30 ist 0x61. Die genauen Informationen zum Datenprotokoll sind in den Dokumentationen der Firma Sensirion zu finden.
Idealerweise gibt es, wie fast immer, schon eine fertige, studententaugliche Library für die diversen Microcontroller. So braucht man sich keine Gedanken mehr zu machen und kann die Daten des angeschlossenen Sensors direkt auslesen. Die Beispielprogramme findet man unter den Examples der Libraries.
electrical specifications
Für die Versorgungsspannung des Sensors kann der Arduino mit 3.3V oder 5V dienen. Vorsicht ist jedoch geboten, wenn man den I²C Bus, verwendet: Hier ist der Input High-Level mit 1,75-3.0V festgelegt und der Output High Level mit max. 2.4V. An einem Arduino sind die Pegel aber 5V!! Also muss hier ein Levelshifter eingebaut werden – oder zumindest, für einen schnellen Test geeignete Widerstände.
Der hier angeführte Programmcode stammt im Wesentlichen aus dem Beispiel der Library von Nathan Seidle von SparkFun Electronics:
/*By: Nathan Seidle SparkFun Electronics Library: http://librarymanager/All#SparkFun_SCD30 */#include <Wire.h>#include "SparkFun_SCD30_Arduino_Library.h"
SCD30 airSensor;
voidsetup()
{
Wire.begin();
Serial.begin(9600);
//Serial.println("SCD30 Example");
airSensor.begin(); //This will cause readings to occur every two seconds
}
voidloop()
{
if (airSensor.dataAvailable())
{
// Serial.print("co2(ppm):");
Serial.print(airSensor.getCO2());
//Serial.print(" temp(C):");
Serial.print(",");
Serial.print(airSensor.getTemperature(), 1);
// Serial.print(" humidity(%):");
Serial.print(",");
Serial.print(airSensor.getHumidity(), 1);
Serial.println();
}
else//Serial.println("No data");
delay(500);
}
Mit diesen Codezeilen im Arduino Uno und der korrekten Verdrahtung (SDA -> an Arduino A4 und SCL -> an Arduino A5 über einen geeigneten Pegelwandler) geht’s dann mit Matlab weiter. Der Arduino sollte jetzt in einem seriellen Terminal folgende Zeilen ausgeben: (Beispiel)
473,28.5,12.9
473,28.5,13.0
470,28.5,13.1
469,28.5,12.9
466,28.5,12.9
465,28.5,12.7
465,28.5,12.5
463,28.6,12.6
461,28.6,12.5
463,28.5,12.4 … und so weiter
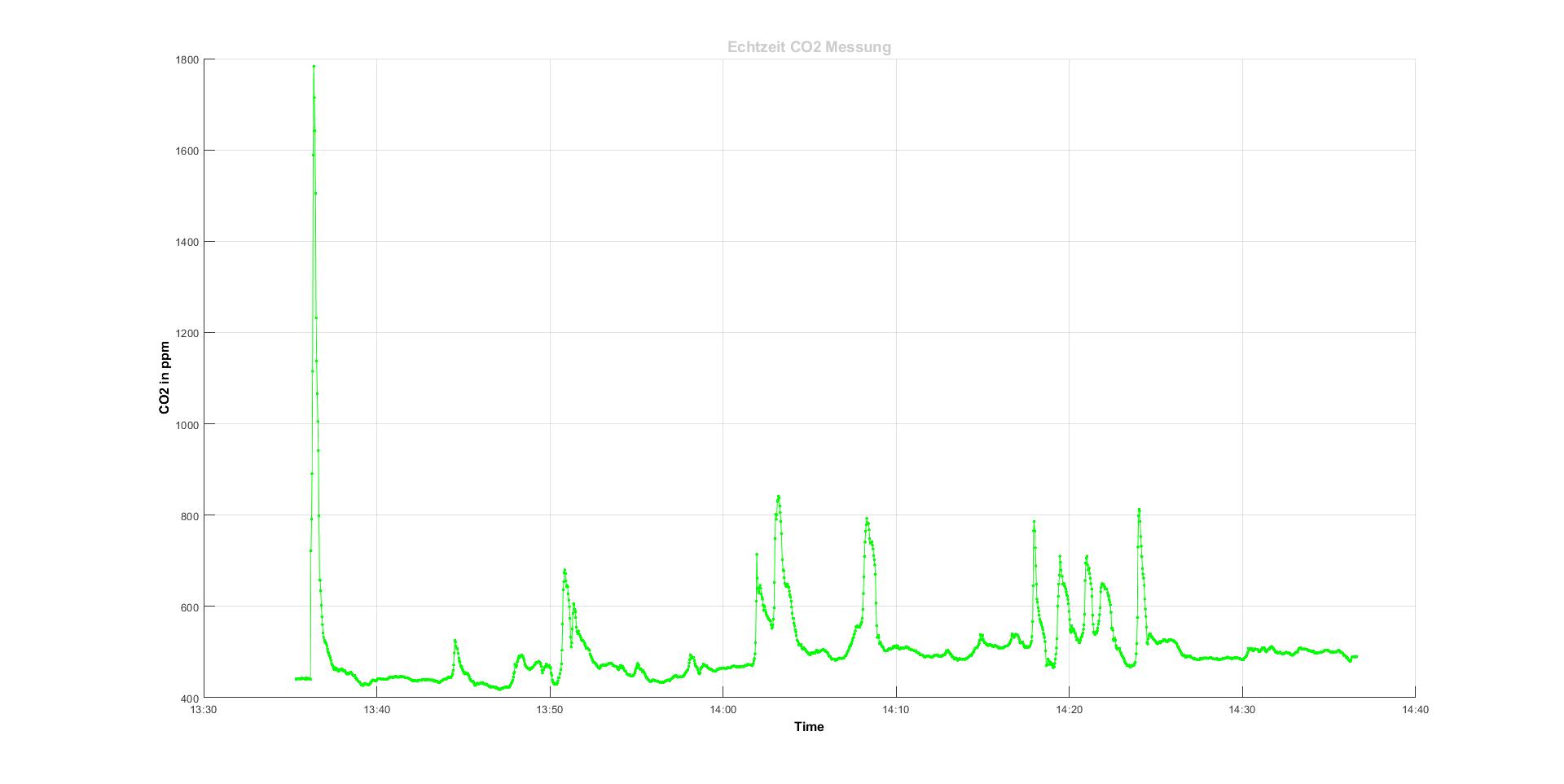
Diese gilt es nun in Matlab einzulesen und über einen definierbaren Zeitraum aufzuzeichnen und gleichzeitig in einem Plot darzustellen. Das Matlabskript hier macht es möglich… (pn falls es jemand benötigt)
Als Ergebnis erhält man dann einen Plot, der den CO2 Verlauf im Raum (in dem Fall am Schreibtisch meines Büros) darstellt.
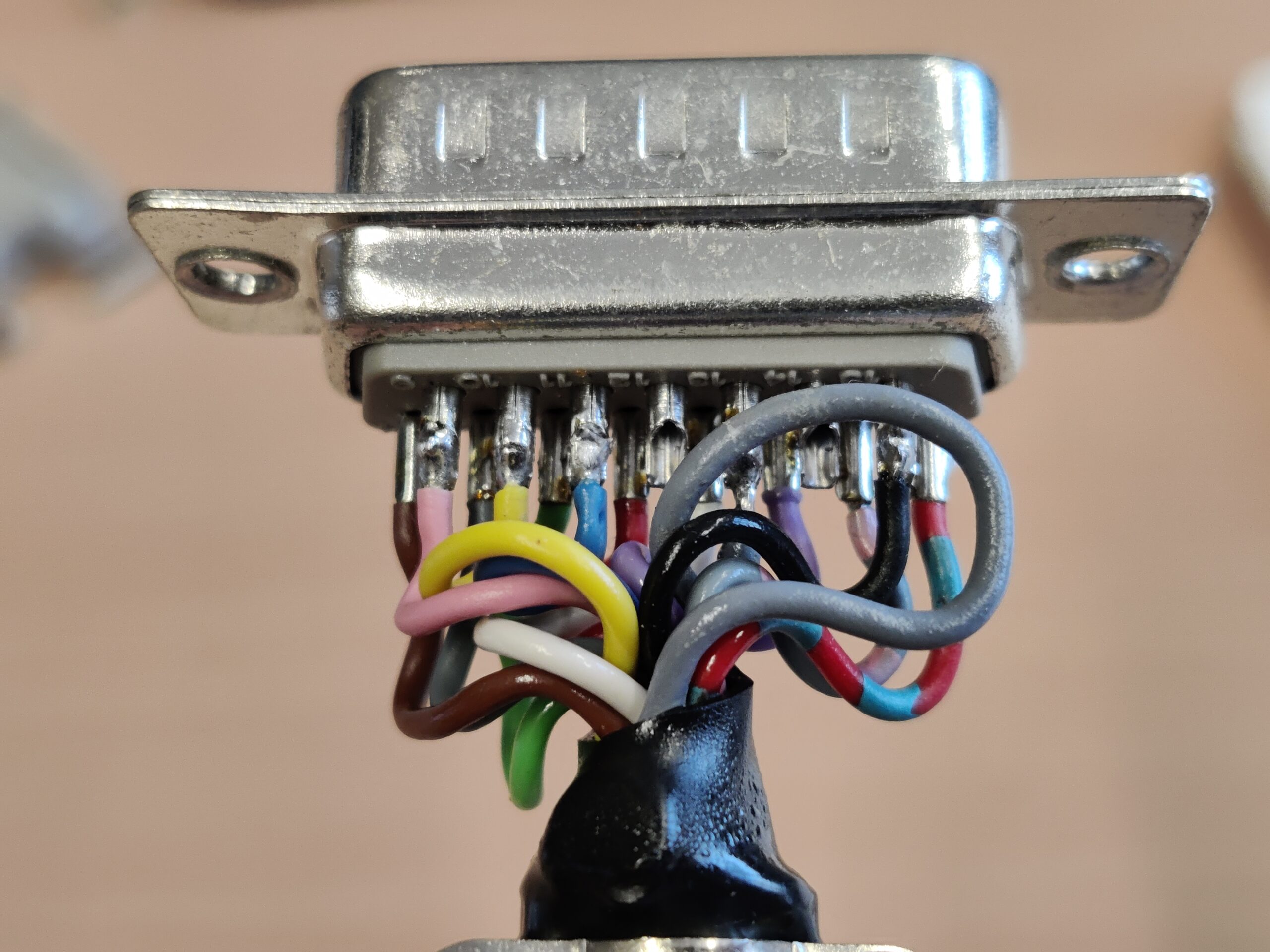
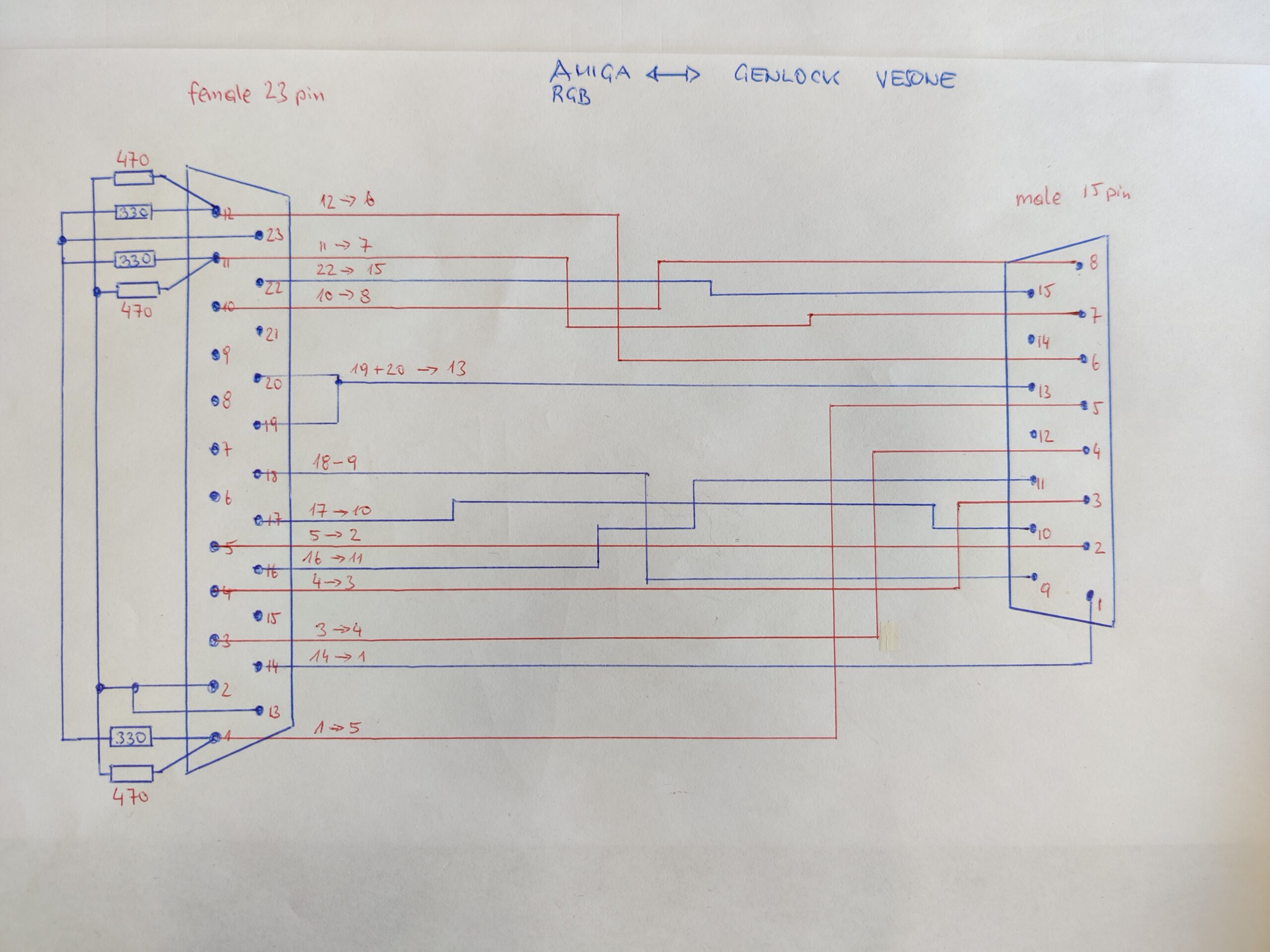
Vor einiger Zeit habe ich über das Amiga Genlock „VESONE“ einen Beitrag verfasst. Der ist unter dem Titel „Amiga und Genlock“ zu finden. (link)
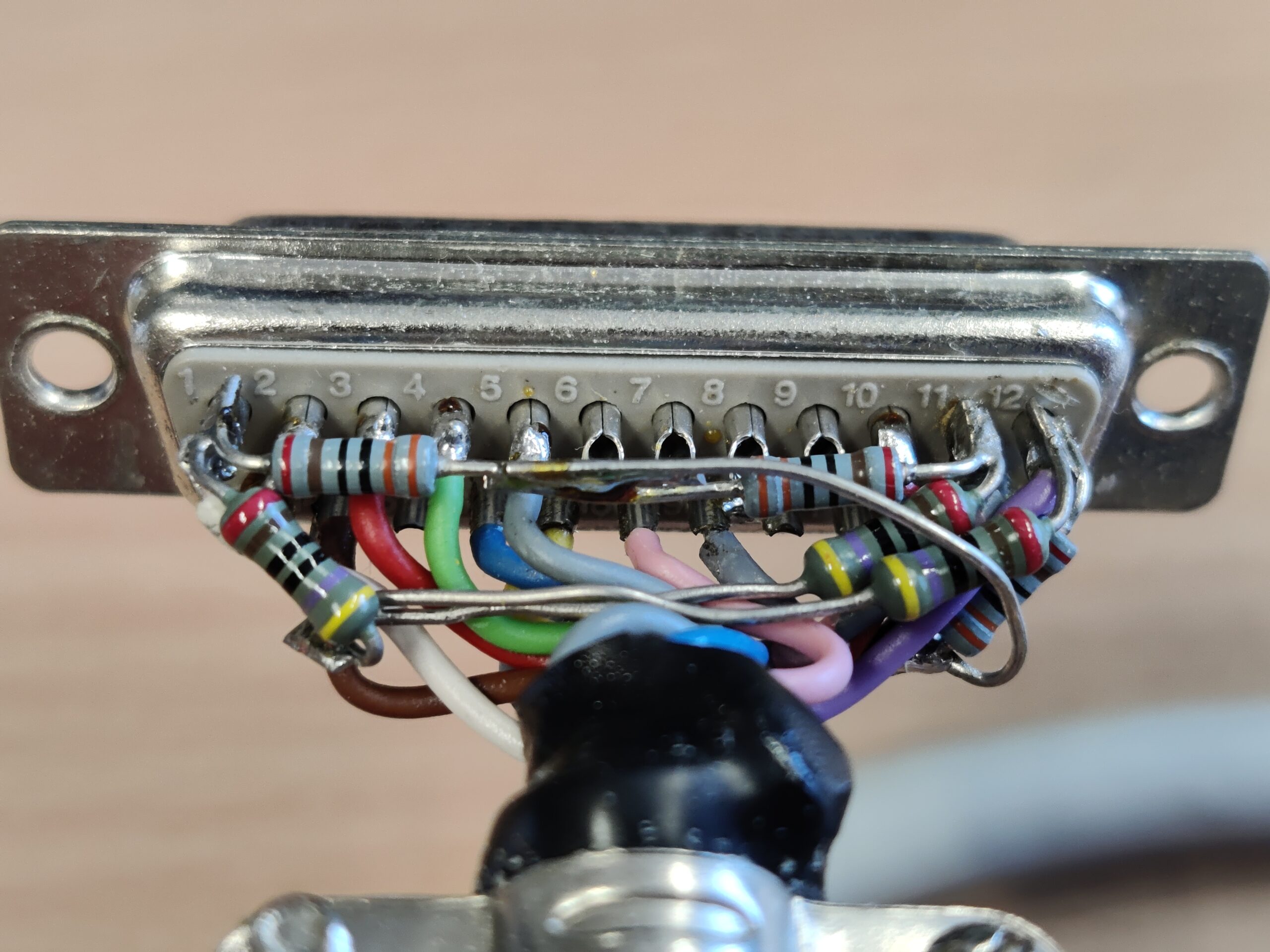
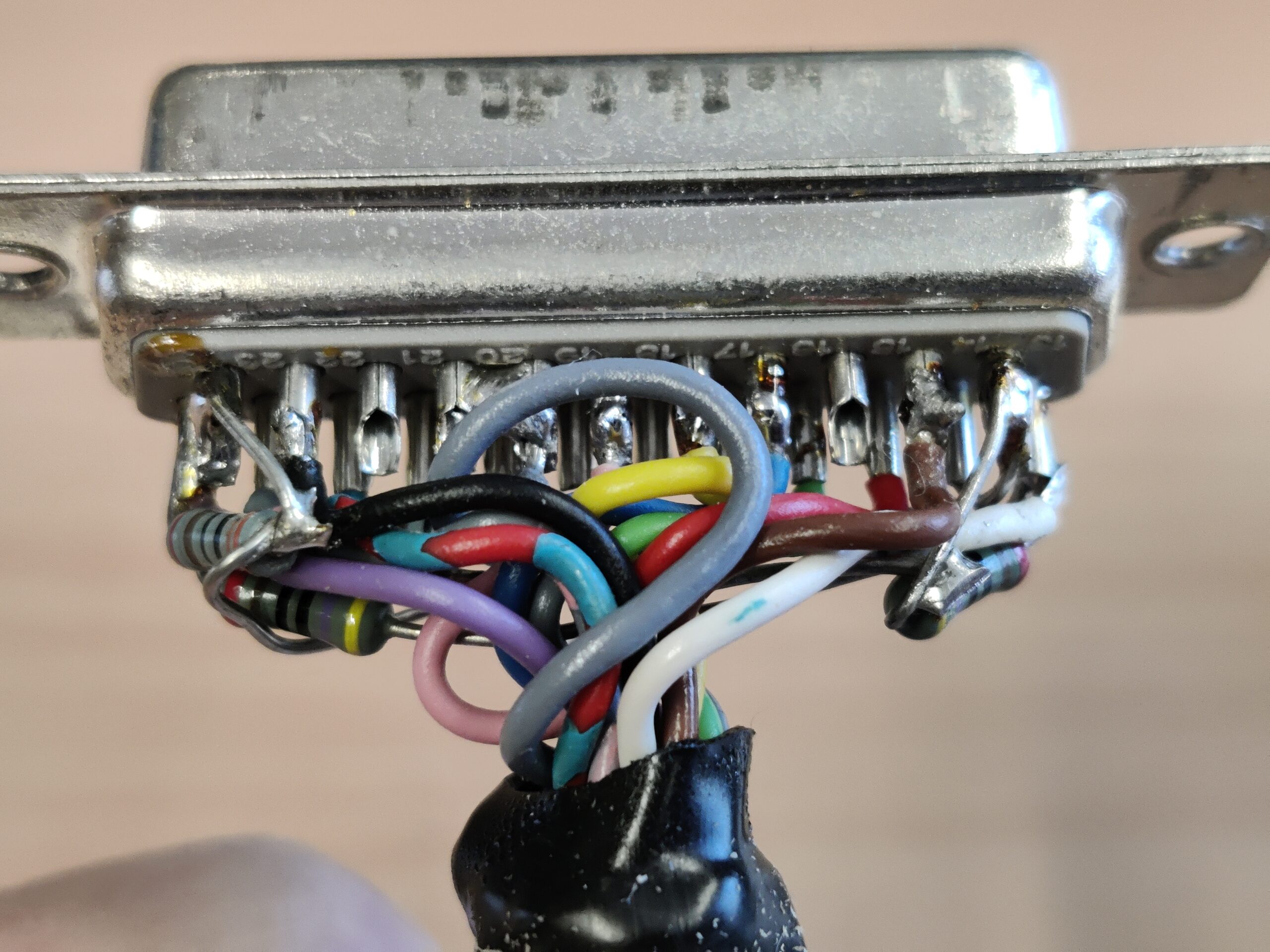
Es gibt anscheinend doch noch einige Leute, die ein solches Gerät besitzen und es wieder in Betrieb nehmen möchten. Da aber, so wie auch bei mir, die notwendigen Kabel, Software etc, nicht unbedingt dort gelagert sind, wo auch das Gerät ist, kann es schwierig werden. Ich dachte mir zwar, dass es keine Rolle spielt, denn wofür gibt es denn das Internet – doch weit gefehlt. Man findet nichts. Das habe ich jetzt gemerkt als mich ein Blogbesucher nach dem Pinout des RGB zu Genlock Kabel gefragt hat. Ich habe nichts im Netz gefunden. Doch tief in den Schachteln im Keller in diversen Kabelkisten hatte ich Glück. Das Kabel tauchte auf. Um die Steckerbelegung nun auch mit andrern Retrofans zu teilen habe ich die Pinbelegung heraus gezeichnet und stelle sie hier online.
Nach dem großen Erfolg meines ersten Buches zum Retroblog, habe ich mich nun durchgerungen und ein zweites Buch verfasst – NEIN SPASS – es gab gar keinen Erfolg. Das Buch habe ich damals verfasst, um für mich selber ein in Papier gedrucktes Werk meiner (Un)taten dieser Website in Händen zu halten. Denn erstens ist es wesentlich praktischer, einmal schnell was nachsehen zu können – ohne immer ein Internet zu Verfügung zu haben und zweitens: was wenn der/die Server nicht mehr erreichbar sind, oder gelöscht werden, oder gar abbrennen? Oder noch schlimmer, wenn jemand das Internet löscht… 😀
Ich dachte mir damals zwar, es über eine „Druck on Demand“ Option aufzulegen, aber wer weiß ob das irgendjemanden interessiert und ob ich das überhaupt so einfach darf. Und wer würde dafür auch so viel Geld ausgeben. Denn die Einzeldrucke sind auch ganz schon kostenintensiv. Also sind die hier Vorgestellten, gedruckten Exemplare quasi Unikate. Und ich bin auch ein bisschen stolz darauf, denn es steckt doch einiges an Arbeit drinnen.
Also nun gibt es das Retrobuch Nr.2 mit der Fortsetzung der Blogeinträge vom Ende der ersten Version bis zum Eintrag „Schukosteckdose mit USB (reparieren)“ vom 19.Dezember 2020 und das sind immerhin wieder 96 „Geschichten“ die diesmal 498 Seiten belegen. Auch für diesen Druck habe ich wieder „epubli“ gewählt und dort bestellt. Das hat den Vorteil, dass ich, sollte ich noch einen Druck eines der bestehenden Bücher haben wollen, einfach nur wieder auf „bestellen“ klicken muss, da ja alle Produktionsdaten bereits vorhanden sind.
Ich habe auch einiges dazu gelernt, was die Formatierung der Texte, Fonts, Schrittgrößen und Verzeichnisse betrifft. Die Bilder sind jetzt mit einer höheren Auflösung gedruckt und es sieht alles in allem besser aus.
So bleibe ich dran und werde in ein paar Jahren, wenn wieder genug Content verfasst ist, wieder an einer Ausgabe basteln.