This time he is building our heavy current switch.
[local /files/2010/10/0001.flv]
thx Markus
Projects i ‘m working/worked on
This time he is building our heavy current switch.
[local /files/2010/10/0001.flv]
thx Markus
 One week ago the Android part of the mobile application has started. Two students and Markus, the Android-Application project leader, are going to develop the Android version of the current iPhone app. prototype.
One week ago the Android part of the mobile application has started. Two students and Markus, the Android-Application project leader, are going to develop the Android version of the current iPhone app. prototype.
Fortunately he has managed to get the cell phone carrier Orange on board. Orange has sponsored two state of the art smart phones (Samsung Galaxy Leo) running Android OS version 2.2 for the development of the app. The project has officially started and now we are all looking forward to get all the parts of the project, the middle ware (which is my part), the iPhone app and the Android-app. up and running.
have fun
Markus & Mario
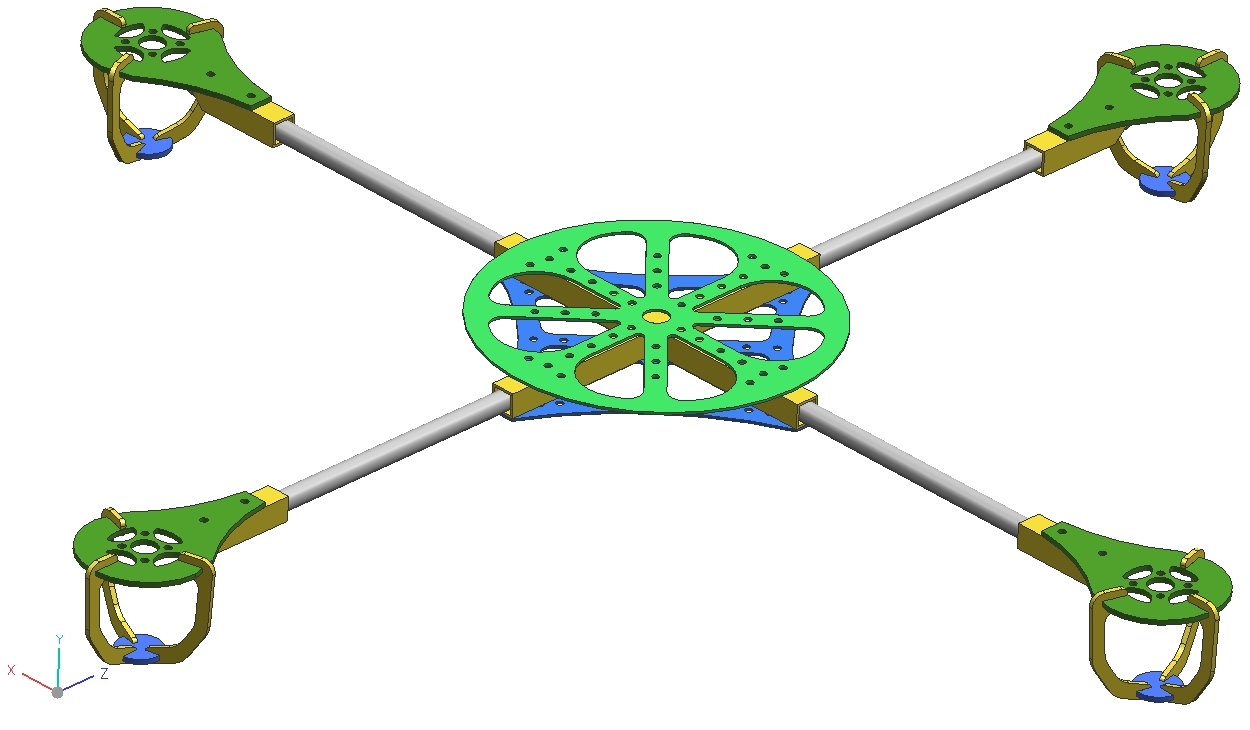
As some of you properly know one of my hobbies is to play around with drone technology 🙂 . Particular Quadrocopters are the name of the game. Currently I’m building 7 Quadros with colleagues and students.
Here are some impressions of my predecessor Copters 🙂







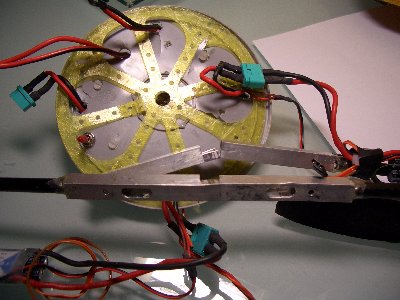
At a test flight with one of our early prototypes we had lets say a unforeseen occurrence.
The short story … After hovering around at our testing side and testing some controller configs our Copter suddenly defies our control. The QuadroCopter was just landed by our brave pilot, as it suddenly spinup its motors and started for a moderate and well balanced ascent towards the sky. You could imagine, in my brain was only one sentence, WHAT THE HELL was going on. Yeah and the hell was really going on. After a minute or so the Copter was only a tiny black point in the sky… nice… there it goes… up to the stars… This would be a new altitude record for Quadrocopters… indeed. I did a short phone call to notify our police… just in case…. :-).
The End of the Story…, nothing stays in the sky, this is also the case with our Copter.
A picture is worth a thousand words, see for your self what we found after the “landing”
One thing I should mention: The failure was a configuration mistake on our side!
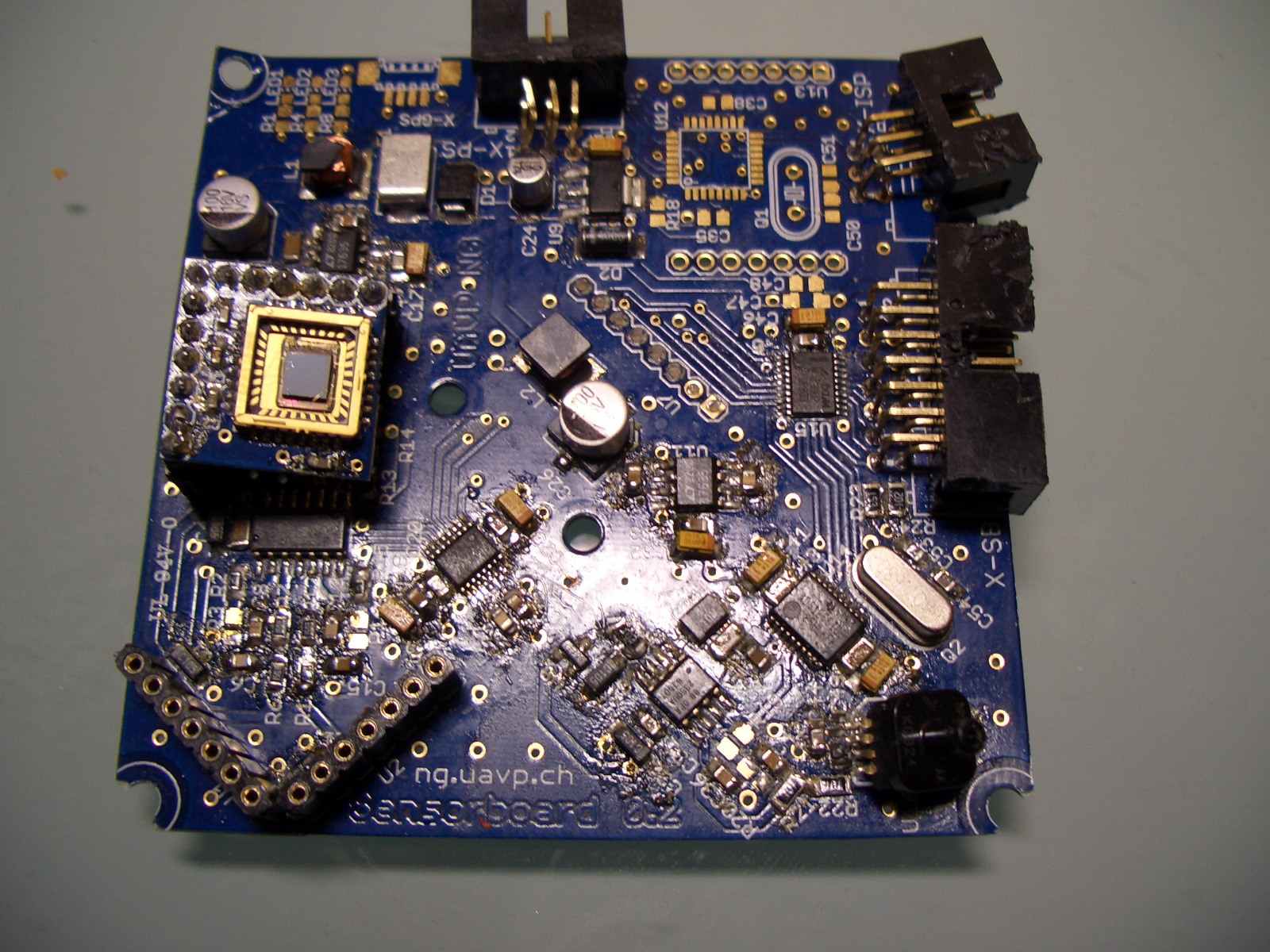
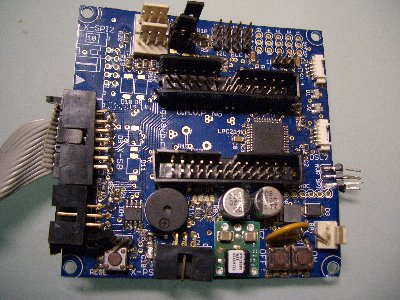


We wanted to used the -IE and the -USB versions with one Daughterboard. The operation purpose should involve longterm logging of various data sources with Ethernet, RS232 or USB interfaces like GPS localization data, ambience data, energ![]() y consumption data, operational data from small water power plants ….
y consumption data, operational data from small water power plants ….
Since the used DimmPcs are also equip with a 44-pin mini-IDE interface we have plenty of space for log data. (For example we use the Flash Modules from Transcend).
The Daughterboard should also be selectively powered with 24V or 5V.
For data transfer we use a USB Samba75 Quad Band GSM/GPRS/EDGE  modem from Falcom.
modem from Falcom.
We have also a special version with external i²C and SPI interface connectors.
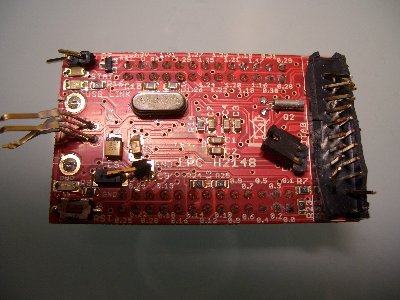
Daughterboard Top up

Daughterboard bottom up












A new Project raised behind the horizon. Since two months the student Daniel L. and  myself are working on an iPhone App for our students.
myself are working on an iPhone App for our students.
The Name is secret (for now) so I call it” The APP.” 🙂
Currently we have more or less finished with the application design and now we have started with the implementation of the first prototype. As the mobile part heavily depends on remote data we also needed a Backend for the core data distribution. Daniel is currently working on the implementation of the iPhone part, and I’m working on the server Backend.
We needed some kind of webservice infrastructure to get the data to/from the mobile application. I have chosen Tomcat for our Server infrastructure, maybe with Apache as first responder. The used framework for the stuff behind is Restlet. The Backend is designed to response with XML or JSON plain/gzipped data formats, depending on the received Accept Headers.
Representational State Transfer ( Rest ) is build around around the transfer of “representations” of “resources”. A resource is mostly an URI endpoint if we use HTTP. Compared to SOAP RPC every developer has to design and implement his own set of functions which represent the interaction interface between the web. App. and the backend. Rest uses the existing HTTP “methods” GET, POST, PUT, DELETE as the command interface. Really cool 🙂 Rest responses are not limited to HTML one can use XML, JSON, binary…
more to come…
have fun
CUAS SCALA MedIT Dream Team:
The SCALA (System Convergence in Applications of Location Awareness) project was started 2 years ago and ended this month. Our part in the project was to bring a ZigBee based indoor location system into service and implement it into the SCALA framework. The core framework was designed and implemented by our Belgium colleagues at the university college of Antwerp (Artesis). A major part of the work was done by one of the key researches Jerry Bracke. (Jerry thx for your hard work 🙂 ).
The user commission meeting was hold at the harbor of Antwerp and involves several presentations of the participating universities and companies, also a live demonstration of the SCALA middleware layer was shown.
To get some impressions of the meeting check out the attached image album.
If you are interested into the SCALA project, or want to do some projects in context of Location awareness with ourselves or one of our partners please do not hesitate to contact me.
And the best,……The SCALA middleware layer is open source! 🙂
have fun
















Since 2013 CDS 3.1 became Open Source, all source code and pcb layouts are available under the Creative Commons (CC) license.
One of the bigger projects I did the last years (starting 2004) was the CDS (Campus Door System) project. The goal of the project was to build access system mainly focused to the needs of education facilities. The system is designed to work with every RFID reader which can be interfaced via serial protocols. Mostly RS-485 is used because it can be used effectively over long distances and in electrically noisy environments.
Strictly speaking the first prototype of the CDS with raw access control functionality was developed by a student (Christian E. with project lead Helmut W.) – he programmed the first core micro controller functionality.
The new system should be build up from scratch with an new designed PCB (Printed circuit board) which hosts the four main parts of the access system:
The newest version of the CDS v3.x has 16 separate RS-485 bus interfaces and the number of RFID readers is only limited to the used baud rates and because of that the maximum allowed pooling intervals. Version 2.x which is mainly in service has only 8 interfaces.
The bus interface is galvanically isolated from the logic part of the PCB. The RS485 transceivers are mounted through IC sockets.
Since I use devices with serial protocols I needed an UART (Universal asynchronous receiver/transmitter) and in that case I needed 8 respectively 16. The MultiUART should be interfaced through the used micro controllers external data bus. In my case I took the Infineon C167 the battleship amongst the micro controller family.
I learned very fast that digital design for FPGA could be very challenging – ![]() even if you have some sort of asynchronous circuit design. Then you have to deal for example with metastability and other nice stuff concerning signal runtimes 🙂 At that time I was a completely rookie concerning FPGA stuff. I was lucky enough to have a colleague who told me the common mistakes which you could make with FPGA designed. Thanks to Hermann Sterner – you saved me a couple of months 🙂
even if you have some sort of asynchronous circuit design. Then you have to deal for example with metastability and other nice stuff concerning signal runtimes 🙂 At that time I was a completely rookie concerning FPGA stuff. I was lucky enough to have a colleague who told me the common mistakes which you could make with FPGA designed. Thanks to Hermann Sterner – you saved me a couple of months 🙂
In the end I got a stable design with 16 UART designs, every UART could be configured independently. That means for every request to a serial slave the system could set the needed baud rate on the fly. Every UART has a 1024 Byte TX FIFO and a 128 BYTE RX FIFO.
Every UART internally communicates with an Interrupt Controller which notifies the micro controller of new RX events.
Every UART is mapped to an certain location in the higher address space.
As I already mentioned before I used the C167 for the real-time part.  The used C167CR module comes from pytec. With 2MB RAM and 2MB Flash this module has plenty of space for the access tables.
The used C167CR module comes from pytec. With 2MB RAM and 2MB Flash this module has plenty of space for the access tables.
The code which runs on this micro controller is based on the preliminary work of Christian E., the student which developed the first system. In the process of developing I rewrote or adopted a huge part of the code but some parts are still unchanged from the old system and are still in productive use.
The newest version of the access controller is capable to communicate with devices via different protocols and different baud rates. Because of that the protocol stack for the RFID readers is designed modular. The system can easily be adopted for new protocols.
Firmware updates are done through the embedded system (Web interface). At version 3.x the update process does not need a down time for the system. After successfully downloading the firmware to the flash the system switches seamless to the new program code (switch time >100ms).
The whole access system can be administered through a web interface. The used embedded system is the DIMM-PC®/520-IE. I wrote some details about in one of my last posts. As this system only has 32MB RAM and 32MB FLASH I needed an OS which is highly customizable. -> GNU/Linux is the OS of choice 🙂 .
administered through a web interface. The used embedded system is the DIMM-PC®/520-IE. I wrote some details about in one of my last posts. As this system only has 32MB RAM and 32MB FLASH I needed an OS which is highly customizable. -> GNU/Linux is the OS of choice 🙂 .
The core elements I used are:
BSP ptxdist powered, for DimmPC (AMD Elan) optimized, Build/Toolchain ready to download.
This part was the most interesting one. Due to the fact that I could not find commercial tools for building embedded GNU/linux OS which suit my needs, I began using open source tools (ptxdist) and build my own toolchains. I learned how to build optimized cross compile toolchains for the used CPUs and in the end I got a highly flexible tool/buildchain for building a whole GNU/Linux with bootloader and all the small things which make the system running 🙂
The embedded system is the core device for administration. Every aspect of the system can be configured through the WEB. All HTTP connections are secured via SSL. The embedded system is holding all persons with there tags, all access rights, all doors respective the RFID readers wired together with access rights in a database system.
The backend of the WEB-Frontend consists of a completely self-written tiny CMS system. Focused to have a very low memory footprint and CPU resources. The initial design of the CDS Web frontend /backend was done by Georg Gut 🙂 thx – well done.
We are using a special patched PHP 3.5.x running one a patched (tuned) apache 1.3.x to get good performance results. with our CMS system.
On every change on the access data the system generates the access tables for the micro-controller system and updates the tables through the SPI interface.
The version before I used the parallel port for transmitting data between DimmPc and micro-controller. But it turns out that this interface was not stable enough, so I decided to change this interface to SPI with 1Mb/s transfer mode.
Feature List:
Check out the gallery for some impressions about the System.
Systems in service:


















 Yes it happened, I have started to program the iStuff!
Yes it happened, I have started to program the iStuff!
The initial burn came from one of my fellow workers who wants to have a mobile application based information system for our campus.
As of now iPhone/iPad programming will also become one of our course topics @Medical Information Technology 🙂
What do you need for developing:
First of all you need a Mac OSX . (Snow Leopard preferably). The rumor says there is a chance to get it run under VMware, well, see for your self and read the apple OS license stuff 🙂
The next step is to get an IDE to program your applications. The IDE for programming iStuff is named XCode. XCode offers you all the needed tools to configure, manage, code, compile, debug, simulate and upload your applications to a device.
OK, but where do you get the goodies? Although XCode is free of charge you can not download it on the fly. Yes, you work with apple stuff and apple thinks different. Before you can download your development utils you have to register a developer account at apple. Go ahead -> iPhone Deveoper Center.
You can choose between 5 developer programs -> developer programs comparison link.
As you can see from the comparison chart you have to pay if you want to deploy your application to a physical device.
But we are lucky, for our first steps on iPhone developing we do not really need a hardware. XCode comes with an iPhone simulator. To write and run apps on the simulator you only have to be registered as developer! A registered developer can download the IDE but he cannot create certificates nor provisioning profiles. – But who wants that, … yet 🙂
OK, now we are a registered iPhone Dev., have installed our Xcode IDE + SDK, what next?… Next we have to learn Objective-C (ObjC). what…… C … no problem.
How to write your first application with ObjC and what are the essential parts in the iPhone SDK will be discussed in Part II. stay tuned,…
Have fun!
Over the weekend I had time to build a new AVR toolchain with the latest 4.4.x gcc.
Linux AVR Toolchain:
Toolchain download size 93M.
Have fun!
Please give me some feedback if you use this chain. 🙂
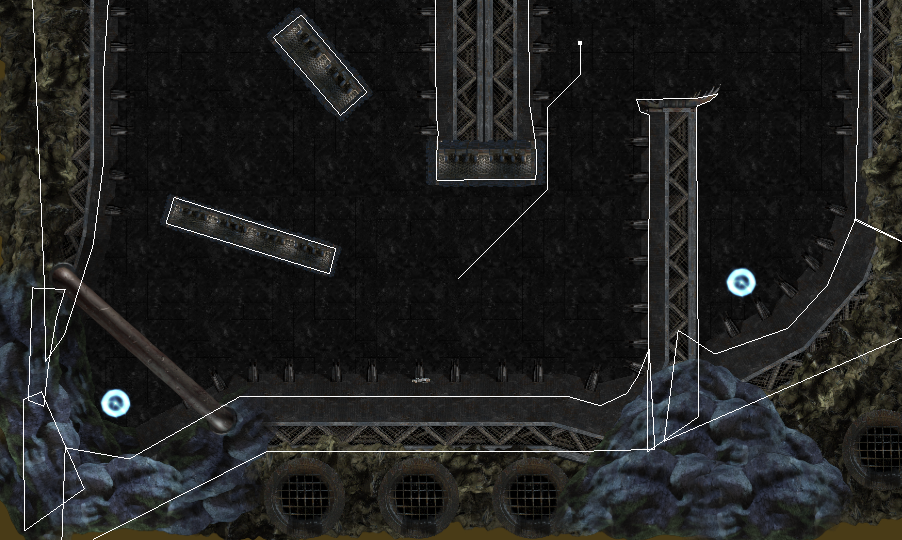
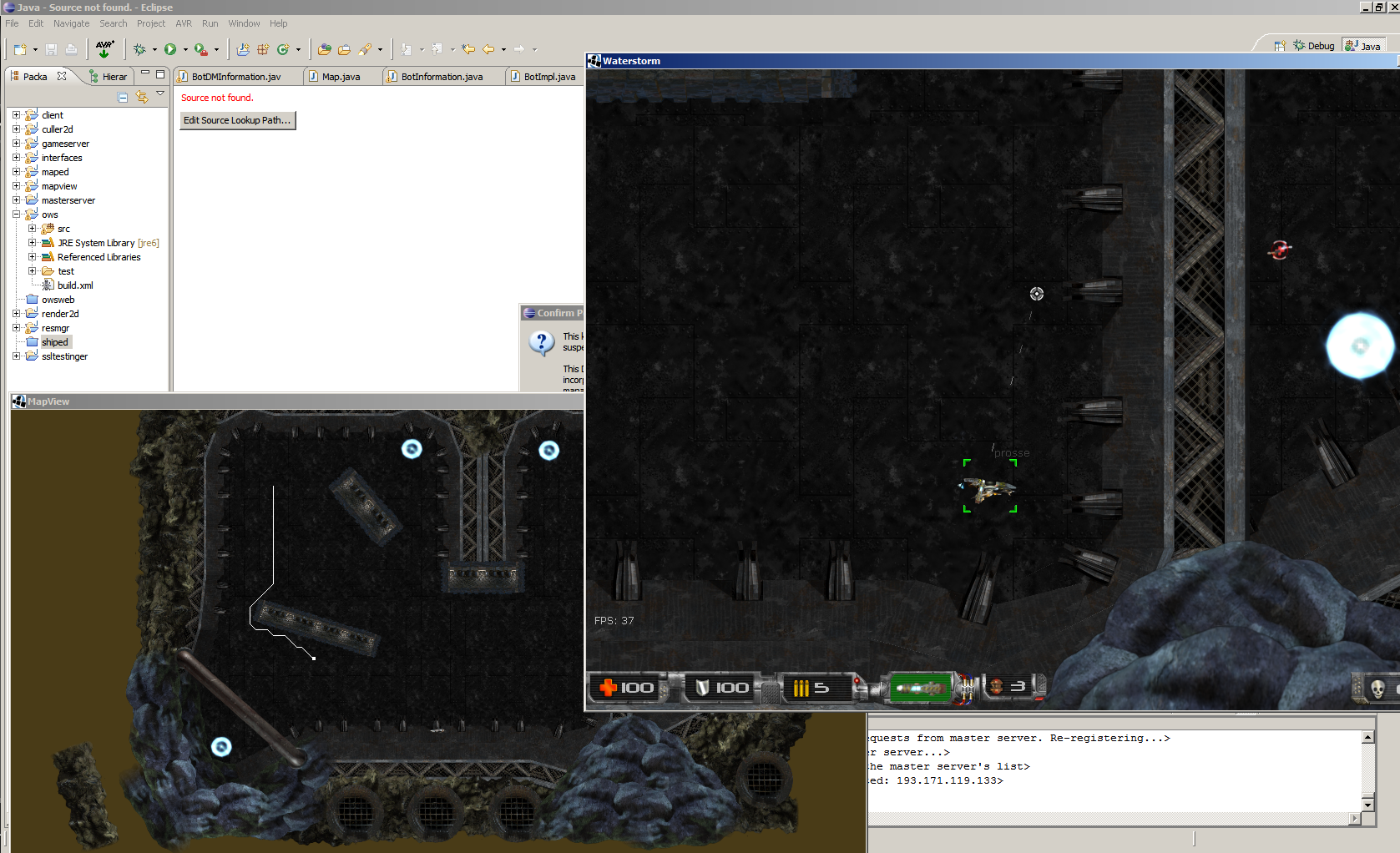
The game belongs to the 2D multiplayer shooter genre. It is entirely written in java, They decided to use lwjgl for the game engine and FengGUI for the Graphic User Interfaces.
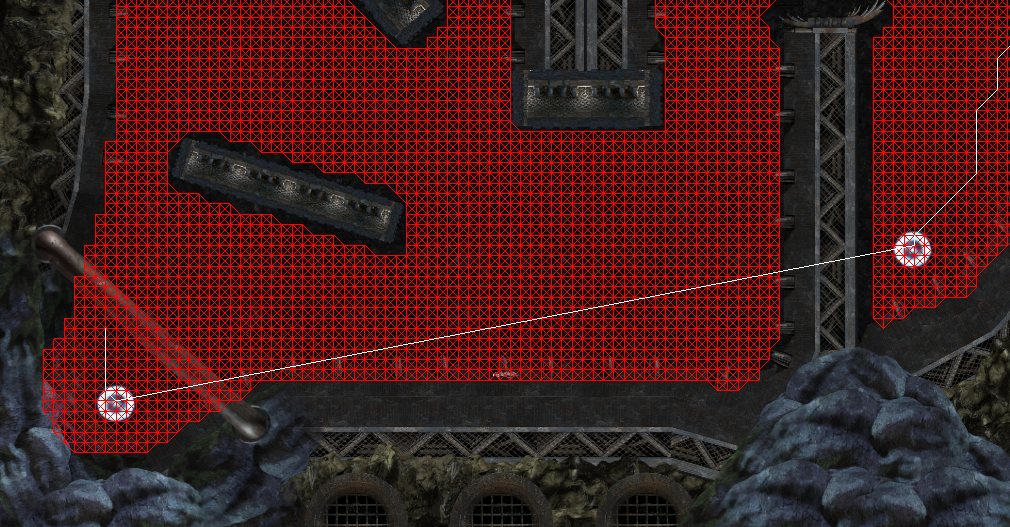
Our part was to implement the Bot System considering the intelligent bahavior of the bots as well as an automatic path finding, which is Markus’ hobbyhorse. To make it short – if you ever want to know how a navigation system finds the right route, ask Markus, he will explain it to you in detail 🙂
Markus will shoot me 🙂 but in the next few sentences i will try to describe what kind of algorithm we decided to use.
Little change of the master plan, Markus misplaced his gun, so he will explain it to you 🙂 ….
Markus its your turn.
First of all we had to decide, what the overall game behavior of the bots should be. We wanted them to act like a human player: (a) select a target, (b) find the best way to the target, (c) attack it or (d) flee to some power ups in case of low ammo or low health. The task of (a), (c) and (d) is simple: if the bot has enough ammo, than attack the closest enemy (could be another bot as well). If the ammo or the health is low, than select one of the power ups as the target. The task (b) is the more sophisticated part of the Bot System – the bot has to find a shortest path towards the target (the enemy or the power up). There are a lot of well-known shortest path algorithms out there, that will handle the task.
But there are some points that have to be considered: the path must not be predictable by a human player (so simple „follow-the-shortest-path“ won’t work) and the server has a limited capacity (there are a number of bots in the game, so the algorithm has to be designed very resource-conserving).
So we decided to use one of the shortest path algorithms, that uses a heuristics to search the space to efficiently reduce the time needed and to „manipulate“ the outcome of the algorithm: the path. We have picked the IDA* (IDAstar), which is a variant of the A* algorithm and allows to perform a series of independent depth-first searches, each with the cost bound increased by a minimal amount. This leads to two ways, to manipulate the resulting path between the bot and its target. First the estimation value (used in the heuristic search) can be blurred by a random value and second the number of iterations can be limited. Both together leads to an unpredictable path as well as speeding up the time needed for the path calculation.
It’s fun to play against the bots – just try it for free at www.waterstorm-game.com

A few months ago me and my colleagues wrote a project proposal for an internal project call/funding. Our goal was to evaluate the possibility of using small drones, in our case we want to use Quadrocopters, for catastrophe management. Our drones should be used as communication relays, disaster reconnaissance, air gas analysis…
Since a few of us are active members in certain Quadrocopter OpenSource community projects, we have also a basic knowledge about this type of drones.
But sadly we didn’t got the fundings 🙁 just a matter of politics,…….
But as I wrote in my caption There is always another one who did the job in our case the guys from the TU Ilmenau.
[youtube whogQY0h8Sc]
If you would like to read the whole article refer to spiegeltv.de link. (German only)
|
|
In our case |