16 for me the rest for the students 🙂
")
16 for me the rest for the students 🙂
A few posts before I wrote about about the project “Campus Door System “. In our real time environment part of the project we are using the miniMODUL-167 which is equipt with an RTC-8583.
For I²C < -> RTC interfacing we are using sources which can be downloaded from the Phytec ftp servers. For the whole project we have been using this source without problems 🙂
After rolling out the system to one of our customers a few weeks later the system suddenly stopped, only a reset could clear the situation. Our in-house systems have never shown this kind of symptoms. So what the hell was going on?
After some days I found out that the problem might be located on the RTC part. After the crash the RTC delivers such funny things like 56 h 78 m 99 s , lol, ok so the RTC counters only compare for equals thats for sure :-). But what part of our code is setting the RTC ?
To make it short, the problem was a combination of our system architecture and the way the used I²C library is working.
Because the I²C library has a low level layer which is responsible for generating the bit pattern of the I²C data, this part of the code is prone to wrong designed interrupt architecture.
Sample of the low level I²C:
/****************************************************************************/
/* sends one bit to I2C-bus, also used for sending ACKNOWLEDGE condition */
void I2CSendBit(BYTE State) {
// I2CDelay();
I2CPutSCL(0); /* setup SCL (redundant) */
// I2CDelay();
I2CPutSDA(State); /* setup SDA */
// I2CDelay();
I2CPutSCL(1); /* enable SDA writing */
// I2CDelay(); /* let SCL get stabilized High */
while(!I2CGetSCL()); /* wait until SCL-line is released */
// I2CDelay();
I2CPutSCL(0); /* disable SDA writing (SDA is now */
/* clocked) */
// I2CDelay();
I2CPutSDA(1); /* release SDA */
}
/****************************************************************************/
/* set SCL-line to desired state */
void I2CPutSCL(BYTE State)
{
if(!State)
{
I2C_PORT &= ~I2C_SCL_MSK; /* set SCL-Line to ZERO */
#ifdef __C166__
I2C_PORT_DIR |= I2C_SCL_MSK; /* set SCL-Pin for OUTPUT Mode */
#endif
/* enable output AFTER setting of */
/* correct level to avoid '1'-level */
/* spikes */
}
else
{
#ifdef __C166__
I2C_PORT_DIR &= ~I2C_SCL_MSK; /* set SCL-Pin for INPUT Mode */
#endif
/* this is possible because of the */
/* external pull-up resistor ! */
/* set SCL-line to ONE */
I2C_PORT |= I2C_SCL_MSK;
}
}
/****************************************************************************/
/* read state of SCL-line */
/* WARNING: This function should be used only if SCL-line is in High-level !*/
/* (This function is for used only for realizing the Slow-Down-Mode) */
BYTE I2CGetSCL(void)
{
#ifdef __C166__
I2C_PORT_DIR &= ~I2C_SCL_MSK; /* set SCL-Pin for INPUT Mode */
#endif
if(I2C_PORT&I2C_SCL_MSK)
return(1); /* read SCL-line status */
else
return(0);
}
This is exactly what happend. In-house we have only a certain amount of readers connected to the external buses of the access system. But our customer has over 100 readers installed. So the interrupt load was at a level where the situation could arise that at the moment where the I²C bit pattern is generated a few interrupts suspended the pattern generation. This leads in the worst case to a write instead of a read flag 🙂
A quick fix was to globally disable interrupts in I²C write situations or a better solution would be to move the accourding code to a high priojority interrupt.
I’m also writing this because some of my colleagues also use this lib – and yes they also do not read manuals 🙂
have fun
Mario
This time he is building our heavy current switch.
[local /files/2010/10/0001.flv]
thx Markus
 One week ago the Android part of the mobile application has started. Two students and Markus, the Android-Application project leader, are going to develop the Android version of the current iPhone app. prototype.
One week ago the Android part of the mobile application has started. Two students and Markus, the Android-Application project leader, are going to develop the Android version of the current iPhone app. prototype.
Fortunately he has managed to get the cell phone carrier Orange on board. Orange has sponsored two state of the art smart phones (Samsung Galaxy Leo) running Android OS version 2.2 for the development of the app. The project has officially started and now we are all looking forward to get all the parts of the project, the middle ware (which is my part), the iPhone app and the Android-app. up and running.
have fun
Markus & Mario
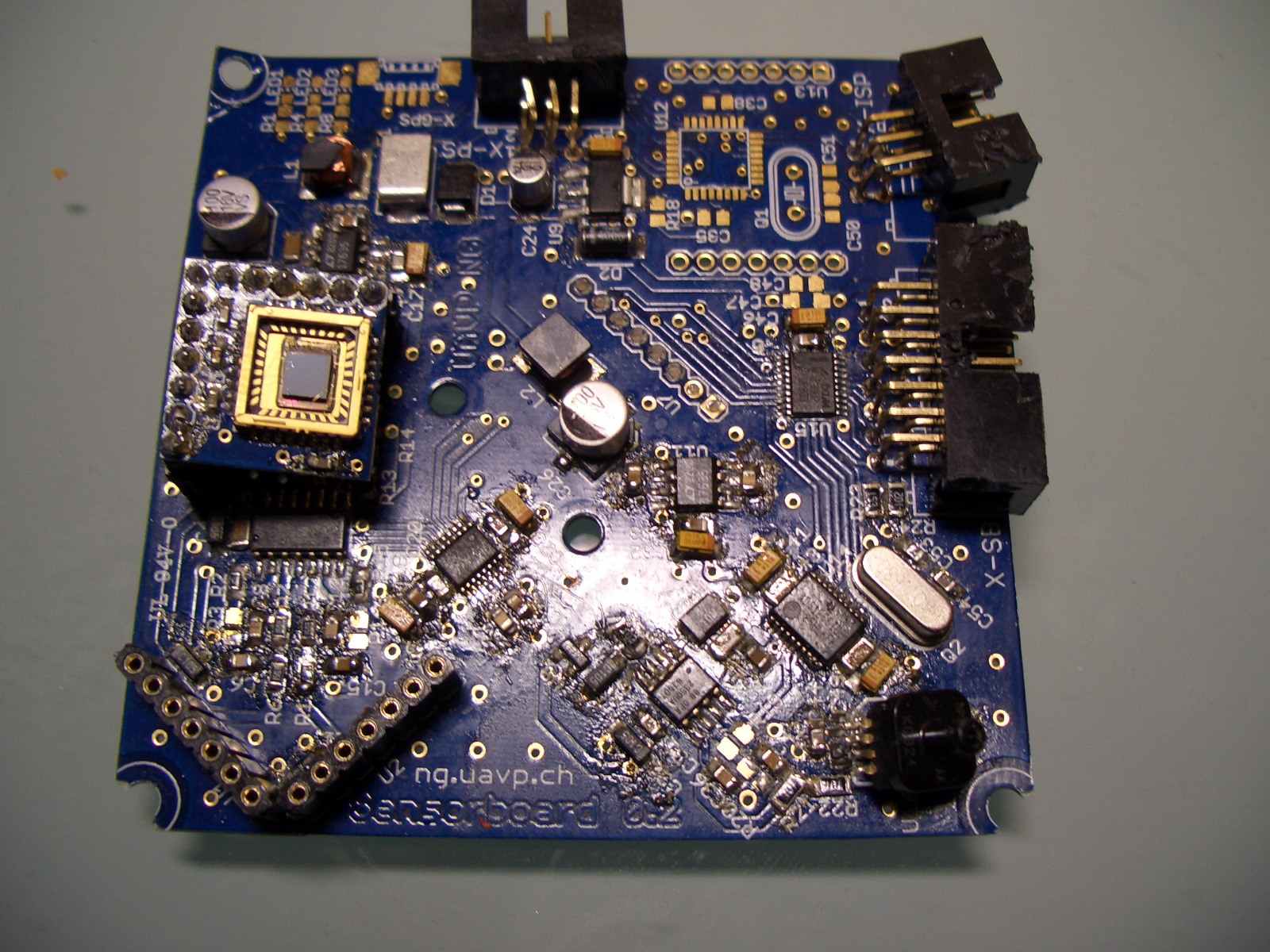
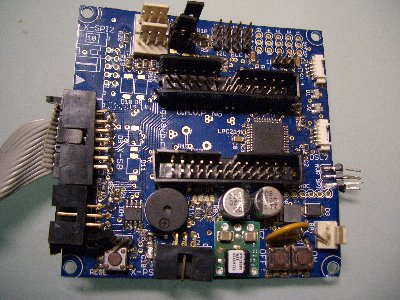
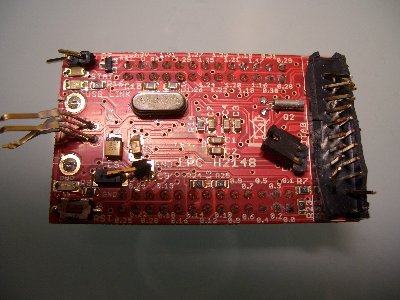
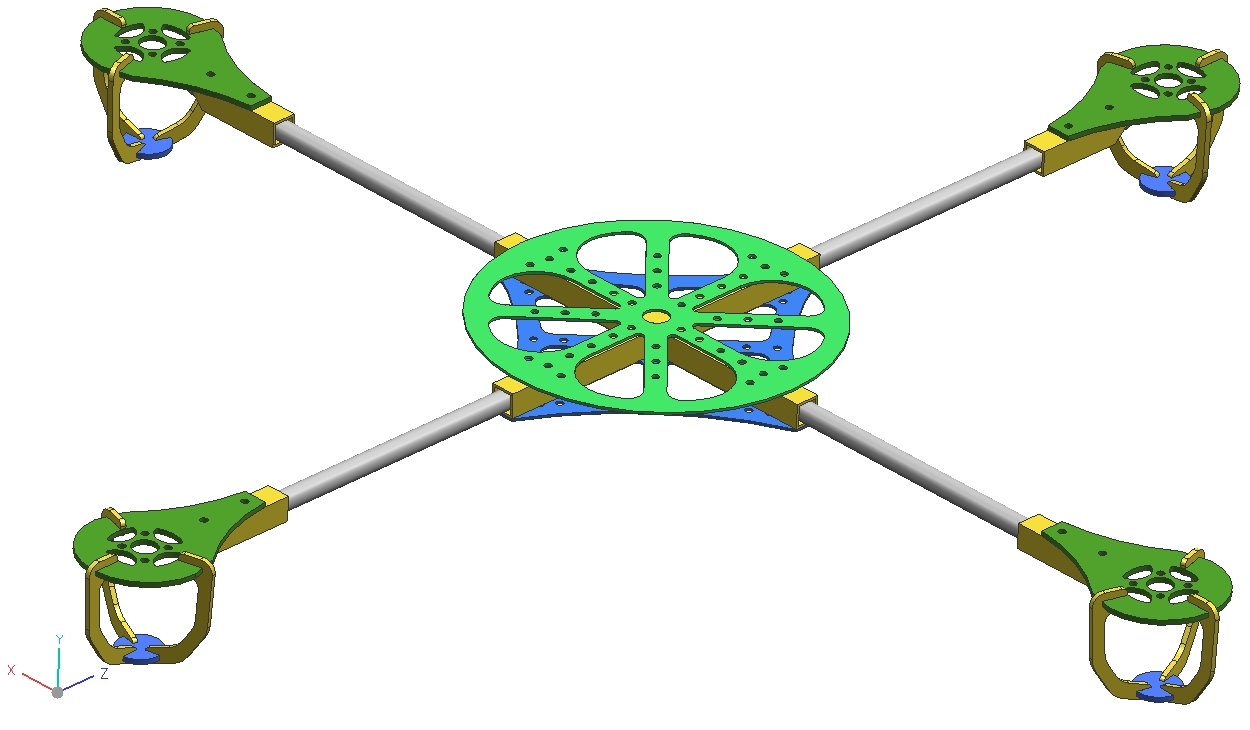
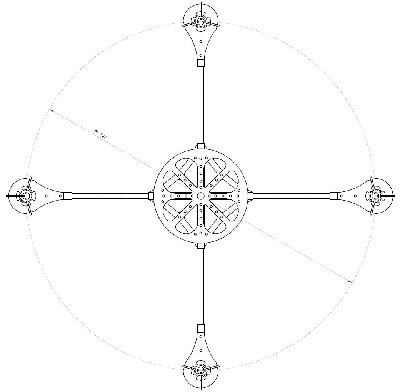
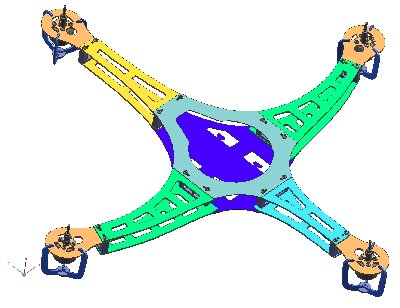
As some of you properly know one of my hobbies is to play around with drone technology 🙂 . Particular Quadrocopters are the name of the game. Currently I’m building 7 Quadros with colleagues and students.
Here are some impressions of my predecessor Copters 🙂







At a test flight with one of our early prototypes we had lets say a unforeseen occurrence.
The short story … After hovering around at our testing side and testing some controller configs our Copter suddenly defies our control. The QuadroCopter was just landed by our brave pilot, as it suddenly spinup its motors and started for a moderate and well balanced ascent towards the sky. You could imagine, in my brain was only one sentence, WHAT THE HELL was going on. Yeah and the hell was really going on. After a minute or so the Copter was only a tiny black point in the sky… nice… there it goes… up to the stars… This would be a new altitude record for Quadrocopters… indeed. I did a short phone call to notify our police… just in case…. :-).
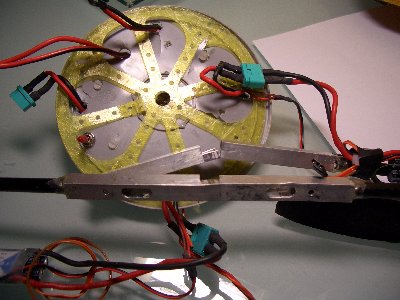
The End of the Story…, nothing stays in the sky, this is also the case with our Copter.
A picture is worth a thousand words, see for your self what we found after the “landing”
One thing I should mention: The failure was a configuration mistake on our side!