![]()
Nachdem ich im letzten Teil die Installation der Arduino-Matlab Packages zum Laufen bekommen habe, kann es nun weitergehen. Ziel dieses kleinen Beispiels ist es ja, an einen Arduino Uno einen NTC-Widerstand anzuschließen. Dieser soll als analoger Temperatursensor dienen (was er ja ist 😀 ) und über einen der A/D – Eingänge des Arduino eingelesen werden. Matlab soll dann schlussendlich die eingelesenen A/D- Werte in Temperaturwerte umrechnen. Das Ganze soll über eine gewisse Zeit laufen, wobei alle paar n-Sekunden ein Wert eingelesen wird. Am Ende soll ein wunderschöner Temperaturplot mit Temperatur über Zeit erstellt werden.
Doch zuerst zum Sensor. Ich verwende hier einen NTC-Widerstand von dem Hersteller VISHAY mit einem R25 von 2200 Ohm (s.Datenblatt). Das bedeutet, er hat bei 25°C einen ohmschen Widerstand von 2.2kOhm. Je wärmer es nun wird, umso kleiner wird der Widerstand und umgekehrt. Der analoge Eingang des Arduino hat eine Auflösung von 10Bit. Das bedeutet, er kann den Spannungshub am Eingang (eingestellt durch die ADC Referenz) in 210 , also 1024 Teile auflösen (zerlegen). Der Standard beim Arduino ist 0V bis 5V. Also 0V am Eingang bedeutet einen ADC-Wert von 0 und 5V bedeutet einen ADC-Wert von 1024. Die Auflösung, also die kleinste auflösbare Spannungsänderung ist daher:
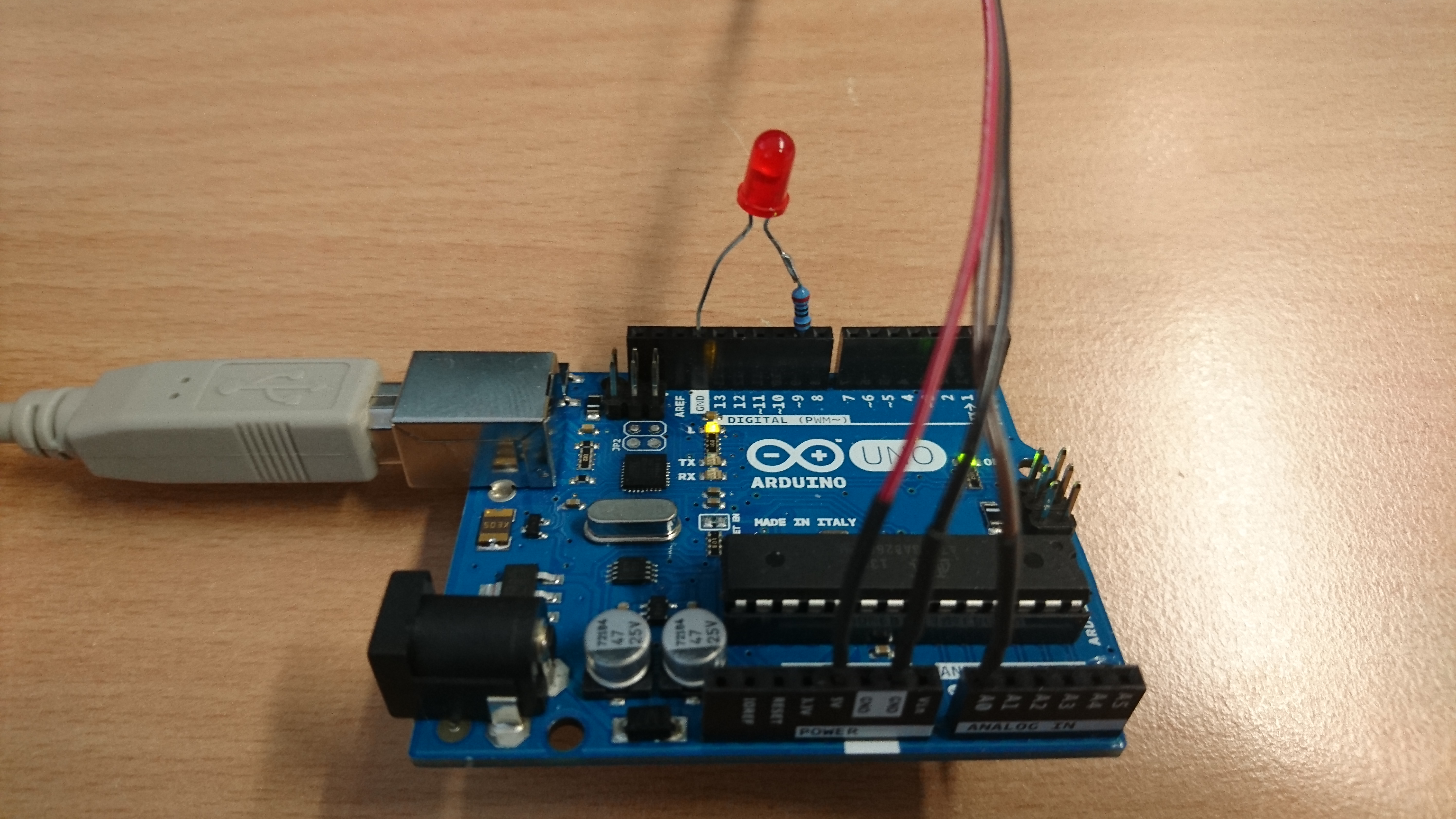
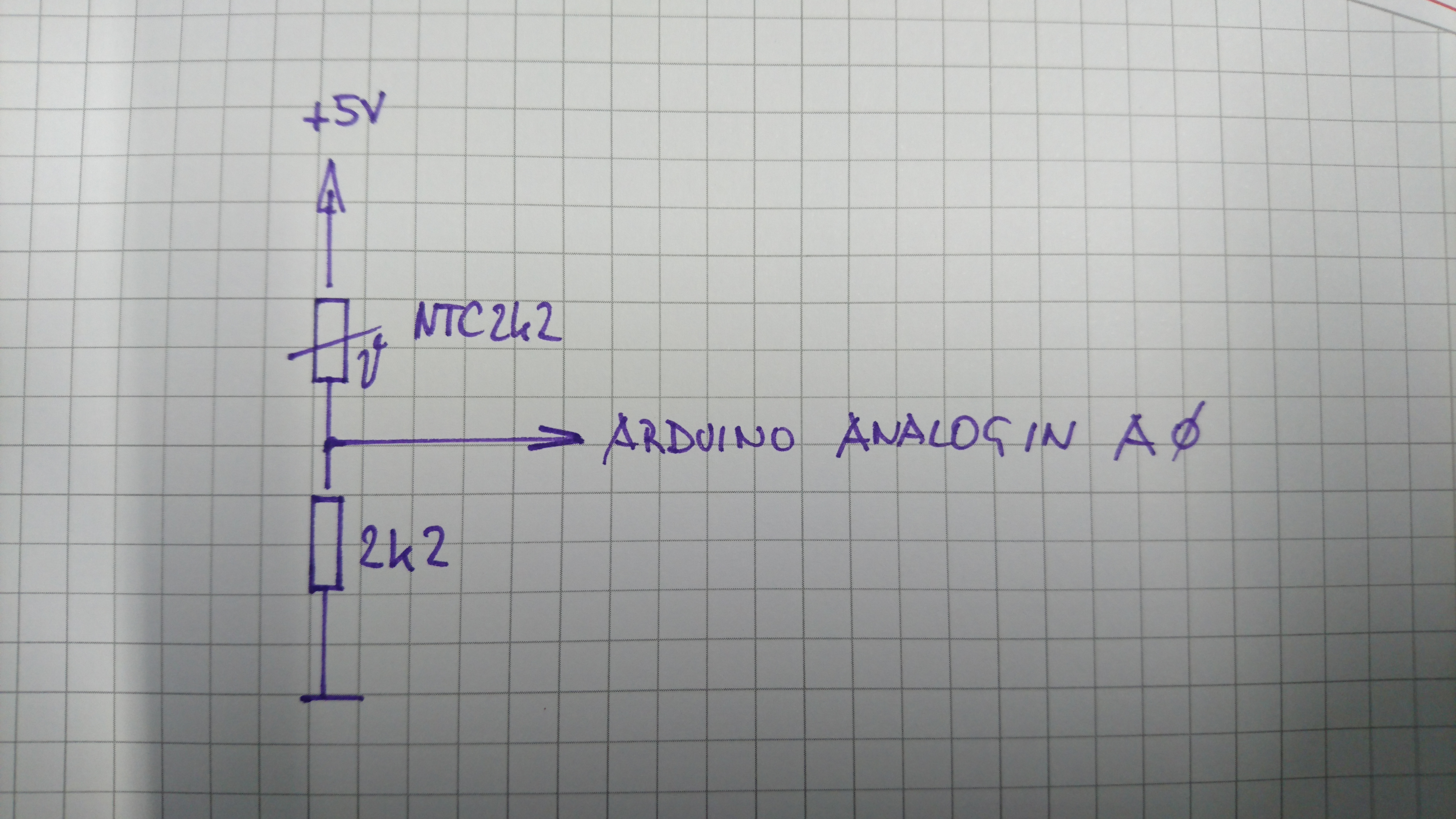 Gibt der ADC beispielsweise einen Wert von 558 aus, so entspricht dies einer Spannung am Eingang von 558*0.00488V = 2.72304V. Doch wie soll der NTC jetzt an den Eingang angeschlossen werden? Ganz einfach. Man nehme einen Spannungsteiler und dimensioniere ihn so, dass der Strom durch die beiden Widerstände nie so groß werden kann, dass er zum einen die Versorgung des Arduino gefährdet und zum anderen auch nie so groß werden kann, dass er den NTC selbst erwärmt. In der Skizze ist nun dargestellt wie der Spannungsteiler aufgebaut und angeschlossen ist. Jetzt gilt es noch herauszufinden, wie aus der Spannung am ADC der gemessene Widerstandswert berechnet werden kann. Hier hilft die Spannungsteilerregel:
Gibt der ADC beispielsweise einen Wert von 558 aus, so entspricht dies einer Spannung am Eingang von 558*0.00488V = 2.72304V. Doch wie soll der NTC jetzt an den Eingang angeschlossen werden? Ganz einfach. Man nehme einen Spannungsteiler und dimensioniere ihn so, dass der Strom durch die beiden Widerstände nie so groß werden kann, dass er zum einen die Versorgung des Arduino gefährdet und zum anderen auch nie so groß werden kann, dass er den NTC selbst erwärmt. In der Skizze ist nun dargestellt wie der Spannungsteiler aufgebaut und angeschlossen ist. Jetzt gilt es noch herauszufinden, wie aus der Spannung am ADC der gemessene Widerstandswert berechnet werden kann. Hier hilft die Spannungsteilerregel:
In diesem Beispiel hier besteht der Spannungsteiler aus dem NTC (2k2 @ 25°C) und einem 2k2 Festwiderstand. Wenn der NTC null Ohm haben sollte (nur rein theoretisch), so fließt ein maximaler Strom von 0.002A durch die Widerstände (5V/2200Ohm). Wir lesen jetzt in Matlab den Spannungsabfall am NTC ein und können uns über den Spannungsteiler den Widerstandswert berechnen. Jetzt fehlt nur noch die Formel zur Berechnung der Temperatur. Und die ist, samt den notwendigen Konstanten A1, B1, C1 und D1, im Datenblatt angegeben: Das Ergebnis dieser Berechnung ist die Temperatur in Kelvin. Um die Temperatur aber in °Celsius angezeigt zu bekommen, rechnet man: °C = °K-273,15. Mit all diesen Informationen kann man jetzt ein Matlab-Script schreiben, das dann in etwa so aussieht:
Das Ergebnis dieser Berechnung ist die Temperatur in Kelvin. Um die Temperatur aber in °Celsius angezeigt zu bekommen, rechnet man: °C = °K-273,15. Mit all diesen Informationen kann man jetzt ein Matlab-Script schreiben, das dann in etwa so aussieht:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Beispielscript um mit ArduinoUno einen Temperaturverlauf aufzuzeichnen
% 02/2016 by I.Bihlo
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%a = arduino('com5','Uno');
a = arduino('com5','Uno','TraceOn', true)
analogpin=0;
analog=0;
%ein paar konstanten für die weiteren berechnungen
%
r=2200; %Spannungsteilerwiderstand
rt=0; %das wird der errechnete widerstand des NTC
urt=0; %das wird der errechnete Spannungsabfall am NTC
% konstanten für berechnung der Temperatur aus NTC Widerstand
% B25=3977K
a1=3.354016E-03;
b1=3.2569850E-04;
c1=2.61013E-06;
d1=6.38309e-08;
rref=2200;
%Lesen eines Temperaturabhängigen Widerstandes am Analog Eingang A0
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
for x=1:50
analog(x)=readVoltage(a, analogpin) %Liest den AnalogIn von A0 und gibt in Volt aus
urt(x)=5-analog(x); %spannungsabfall am NTC
rt(x)=(r/analog(x))*urt(x); %widerstand des NTC
%berechung der temperatur
rvsrref(x)=rt(x)/rref;
temp(x)=1/(a1+(b1*log(rvsrref(x)))+(c1*(log(rvsrref(x)^2)))+(d1*(log(rvsrref(x)^3))));
tempc(x)=temp(x)-273.15 %Kelin in Celsius umrechnen
pause(2);
end
clear a;
%plot den mist
figure(1);
time=1:50;
plot(time,analog,'b');
grid on; hold on;
plot(time,rt/1000,'r');
plot(time,urt,'g');
plot(time,tempc,'m');
legend('Analogspannung des ADC','Widerstand des NTC in kOhm','Spannung am NTC','Temperatur [°C]');
%ende