![]()
Vor ein paar Jahren habe ich ein Projekt vorgestellt, in dem ein Raspberry Pi als Datenlogger arbeitete. An diesen Raspberry waren ein paar Sensoren angeschlossen, die Umweltdaten, wie Lufttemperatur, relative Luftfeuchte, den Luftdruck und auch die aktuelle GPS Position aufzeichneten. Die Sensoren bestanden größtenteils aus fertigen Breakoutboards, die über die diversen Busse (I²C, Serial, SPI…) an den RaspberryPi angeschlossen waren. Am PI selber liefen Python Skripten, die das Auslesen der Sensoren übernahmen, die Daten zusammenfassten und auf einen USB-Flashspeicher ablegten. Dieses Sammelsurium an Komponenten hatte ich dann in eine Kunststoffbox mit einer Größe von 150x80x50mm eingebaut.
Doch es geht auch um einiges kleiner. Im Rahmen eines kleinen Projektes war es die Aufgabe, diesen Sensor/Datenlogger zu verkleinern. Mein Ansatz, das zu realisieren, war ganz einfach: „Alles neu“. So habe ich das Konzept folgendermaßen geändert:
- der RaspberryPi wird durch einen Microcontroller ersetzt
- es wird eine Platine erstellt, auf der sämtliche Komponenten untergebracht sind
- die erfassten Daten werden auf einer MicroSD Karte gespeichert
- das Board ist auf die wesentlichsten Komponenten reduziert. Die Sensorelektronik und der SD-Card Reader wird direkt auf dem Board platziert
- ein GPS-Empfänger (in Form eines Breakoutboards) soll optional aufgesteckt werden können
- die Programmierung des Controllers wird durch eine ISP Schnittstelle durchgeführt
- die Spannungsversorgung beträgt 5V DC
Daraus habe ich folgendes Blockschaltbild erstellt:
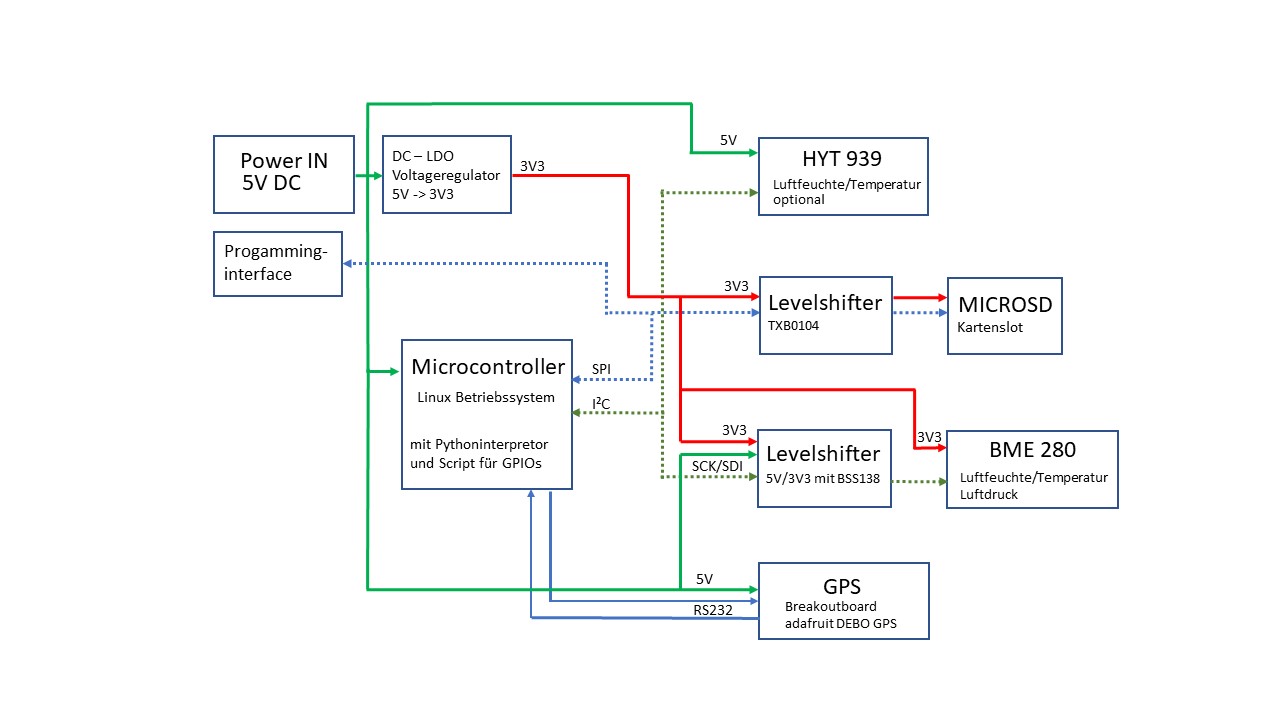
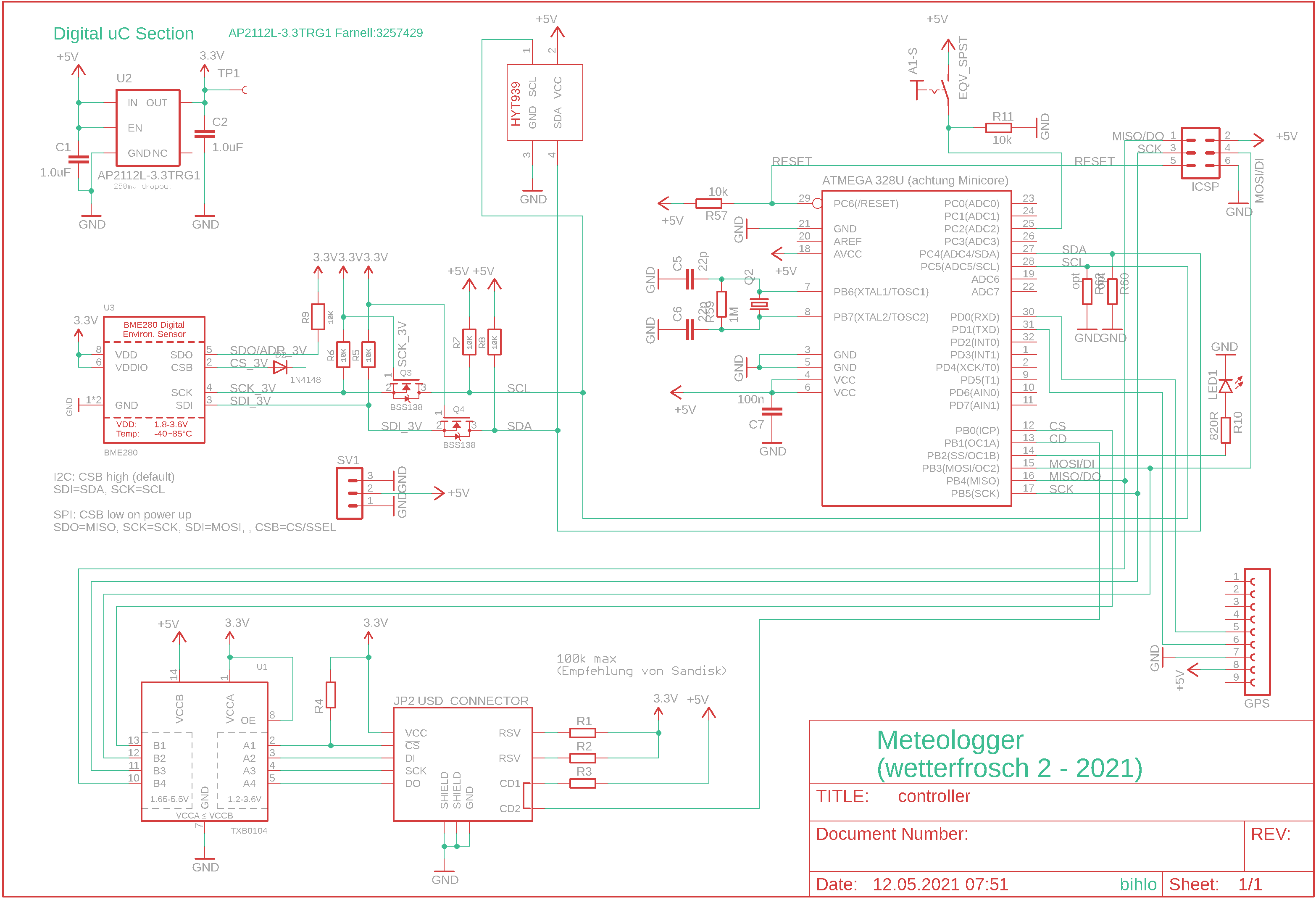
Das zentrale Element ist, wie so oft, der Microcontroller Atmega328. Er benötigt als externe Beschaltung lediglich einen Quarz als Taktstabilisierung. (genauer gesagt bietet er aber auch die Optionen interne Oszillatoren zu benutzen…) Der Microcontroller kommuniziert über den I²C Bus mit den Sensoren HYT939 und BME280. Über die ausgeklügelte bidirektionale Levelshifter Schaltung mittels BSS138 Mosfet mit integrierter Body Diode wird die Anpassung der Pegel von 5V auf der Controller Seite zu den 3,3V auf der Sensorseite realisiert. Diese Schaltung wird sowohl für die SCL- (Serial Clock), als auch für die SDA-Leitung (Serial Data) angewendet.
Die Datenspeicherung findet auf einer MicroSD-Karte statt. Dafür wird ein Card Slot verbaut, der per SPI (Serial Peripheral Interface) mit dem Controller kommuniziert. Auch hier ist eine Anpassung der Signalamplituden notwendig. Das übernimmt dieses Mal jedoch der Chip TXB0108 von Texas Instruments. Das ist ein 8Bit Bidirektionaler Levelshifter.
Ein Taster wird die Datenaufzeichnung starten und stoppen und eine LED soll diverse Statusmeldungen durch Blinkfolgen darstellen.
Das optional aufsteckbare GPS Modul arbeitet mit 5V Spannungsversorgung und die Pegel der seriellen Datenkommunikation (RS232) sind ebenfalls 5V kompatibel.
Zu guter letzt ist natürlich auch die Spannungsversorgung zu planen. Hier soll lediglich eine externe, stabilisierte 5VDC Quelle angeschlossen werden, um den Logger zu versorgen. Die für die Sensoren und SD-Card benötigten 3,3VDC werden am Board mittels einem LDO (Low Drop Out) Regler erzeugt.
Sind alle Komponenten und deren Zusammenspiel definiert, dann wird daraus der Schaltplan gezeichnet. Für meine Bastelprojekte verwende ich hauptsächlich den Schaltplan- und Layout Editor „Eagle“. Aus dem Blockschaltbild ergibt sich die unten abgebildete Schaltung.
 Aus dem Schaltplan habe ich ein Layout mit zwei Layern erstellt, dessen Grundriss die Abmessungen 55x25mm hat. Bis auf die Steckverbinder befinden ausschließlich SMD Komponenten auf dem Board.
Aus dem Schaltplan habe ich ein Layout mit zwei Layern erstellt, dessen Grundriss die Abmessungen 55x25mm hat. Bis auf die Steckverbinder befinden ausschließlich SMD Komponenten auf dem Board.
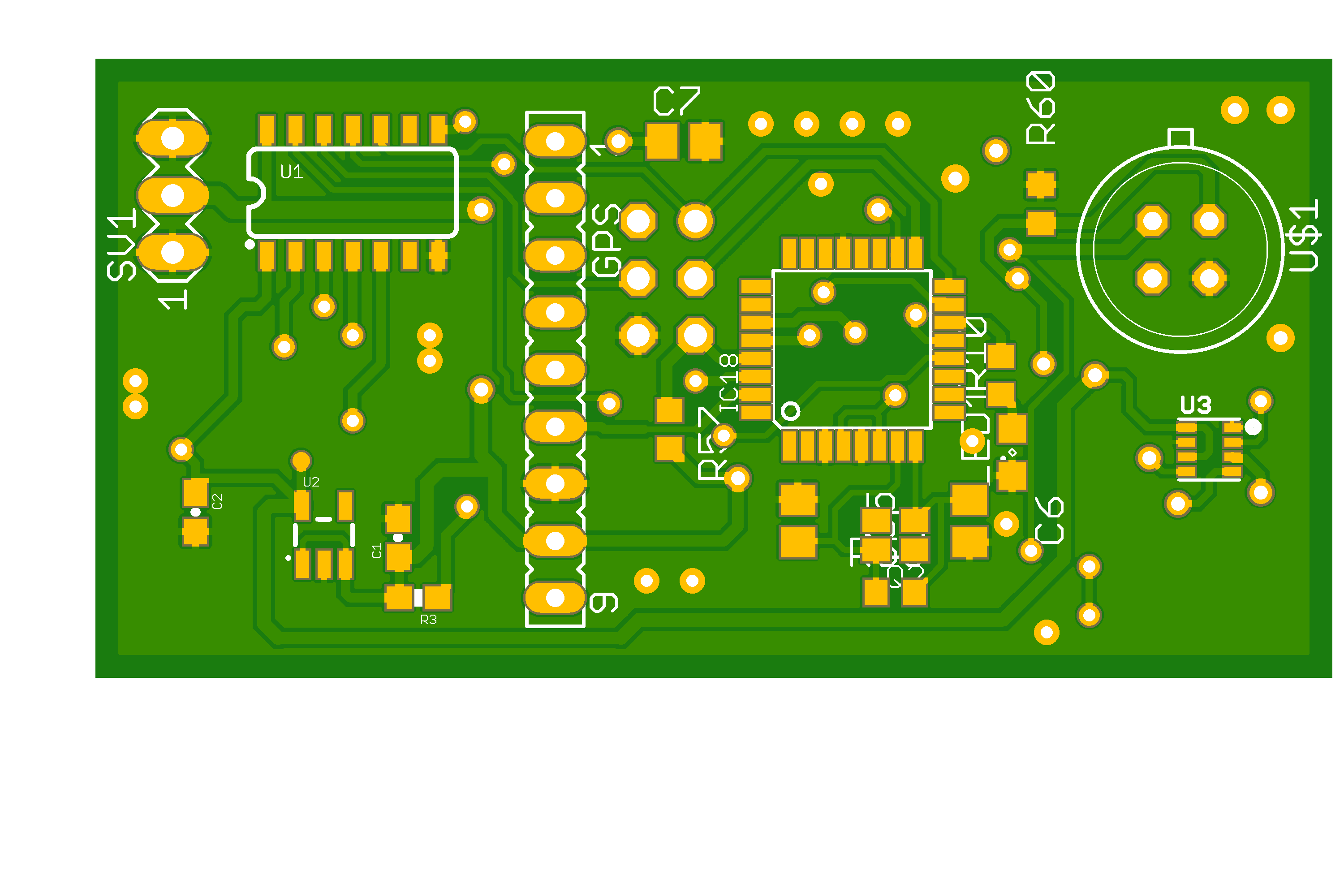 Im Layout Tool gibt es die Funktion, eine optische Vorschau der gefertigten Platine zu betrachten. So kann man vorab überprüfen, ob die Platine den Vorstellungen entspricht und gegebenenfalls die Lage der Bauteile optimieren. Ist das erledigt, wird aus dem Design ein Paket mit Produktionsfiles (Gerberdateien) erzeugt und das dann dem Platinen Hersteller seines Vertrauens gesendet. Da der auch sehr, sehr weit weg angesiedelt ist, dauert die Produktion auch ein paar Tage. Aber schlussendlich kommen die Platinen an und können sich auch sehen lassen.
Im Layout Tool gibt es die Funktion, eine optische Vorschau der gefertigten Platine zu betrachten. So kann man vorab überprüfen, ob die Platine den Vorstellungen entspricht und gegebenenfalls die Lage der Bauteile optimieren. Ist das erledigt, wird aus dem Design ein Paket mit Produktionsfiles (Gerberdateien) erzeugt und das dann dem Platinen Hersteller seines Vertrauens gesendet. Da der auch sehr, sehr weit weg angesiedelt ist, dauert die Produktion auch ein paar Tage. Aber schlussendlich kommen die Platinen an und können sich auch sehen lassen.
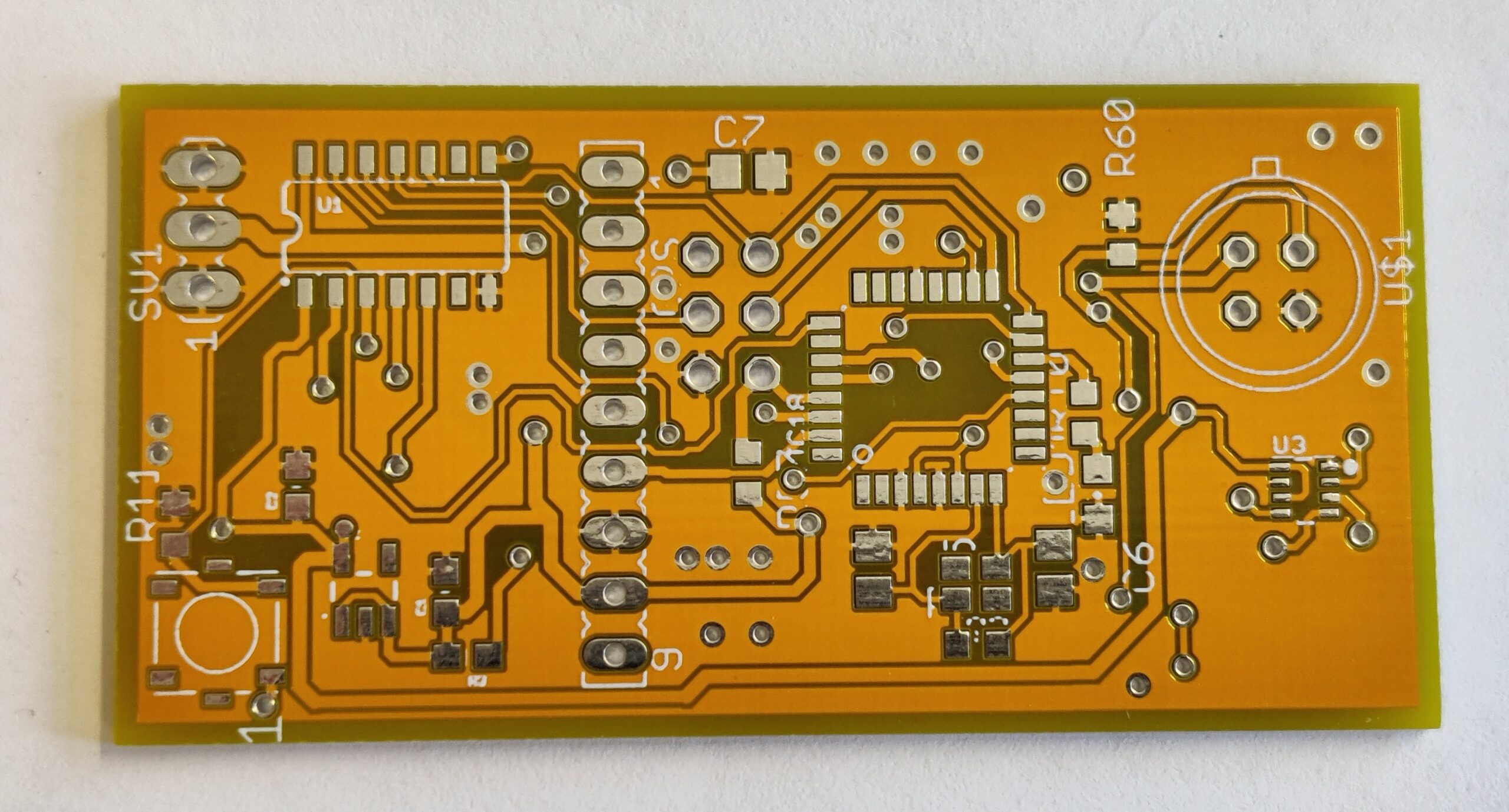
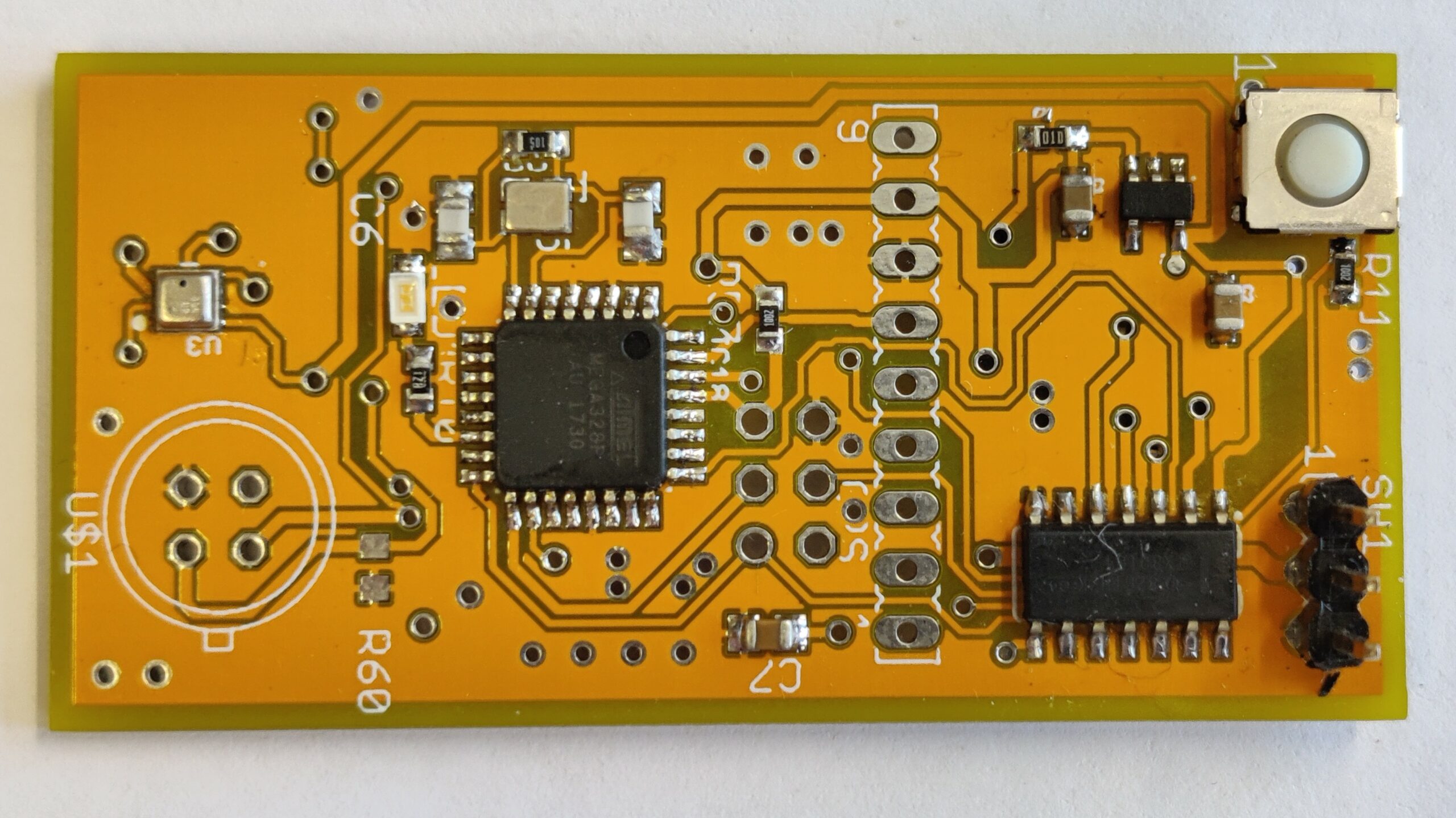
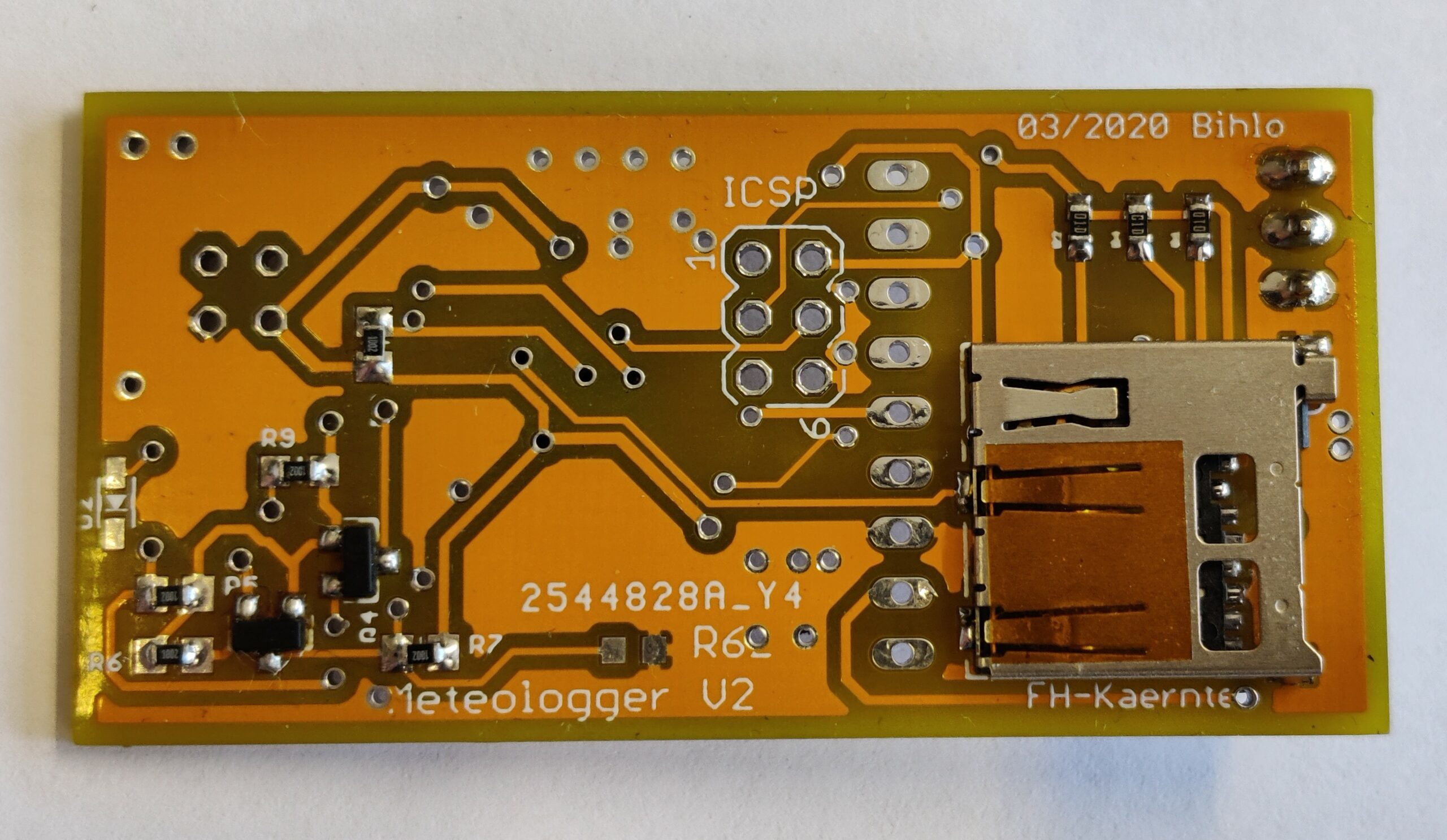
 Die beiden Bilder oben zeigen die Platine von der TOP und der BOTTOM Seite. Der nächste Schritt besteht darin, die Komponenten entsprechend der Planung zu bestellen und danach zu bestücken.
Die beiden Bilder oben zeigen die Platine von der TOP und der BOTTOM Seite. Der nächste Schritt besteht darin, die Komponenten entsprechend der Planung zu bestellen und danach zu bestücken.
 Die Bestückung erledige ich per Hand mit einem, für die SMD-Komponenten geeigneten Lötkolben mit entsprechend kleiner Spitze. Für die ganz kleinen Teile, wie den BME280 Sensor, kommt auch noch ein Mikroskop, bzw. eine Mikroskop Kamera zum Einsatz.
Die Bestückung erledige ich per Hand mit einem, für die SMD-Komponenten geeigneten Lötkolben mit entsprechend kleiner Spitze. Für die ganz kleinen Teile, wie den BME280 Sensor, kommt auch noch ein Mikroskop, bzw. eine Mikroskop Kamera zum Einsatz.
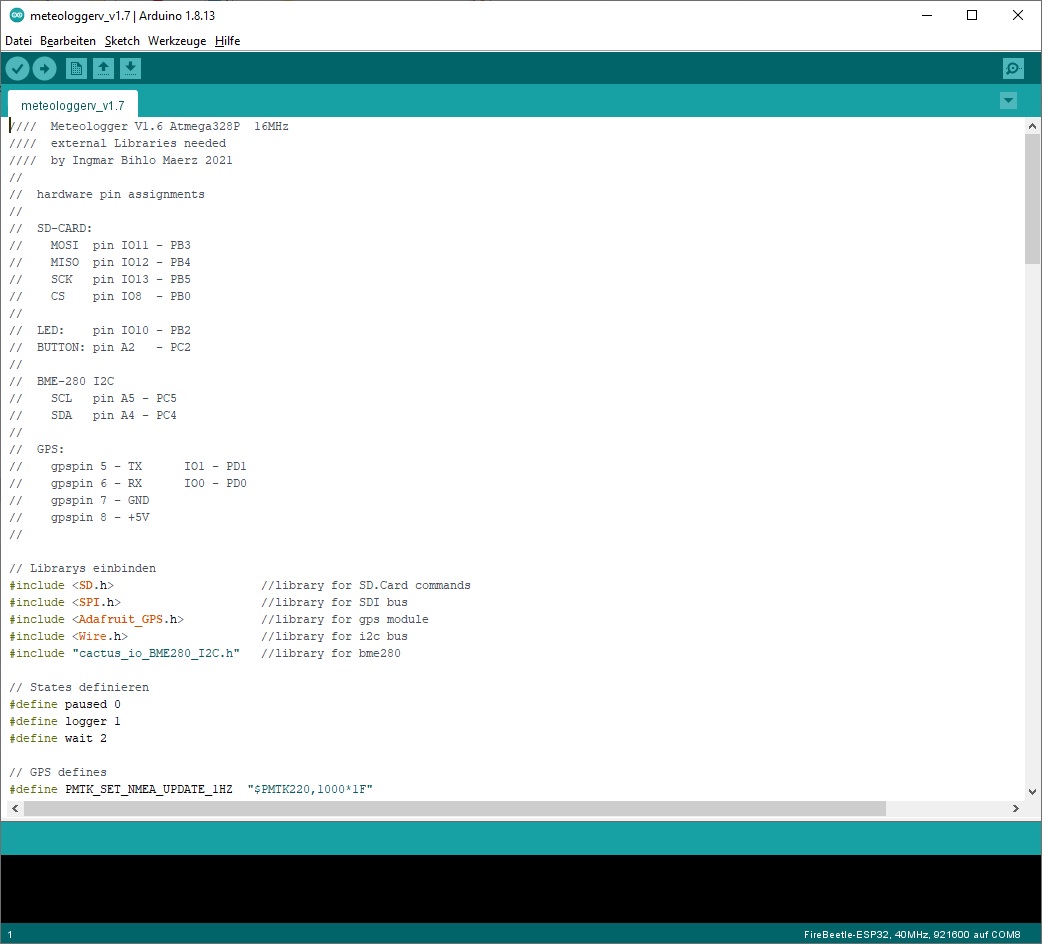
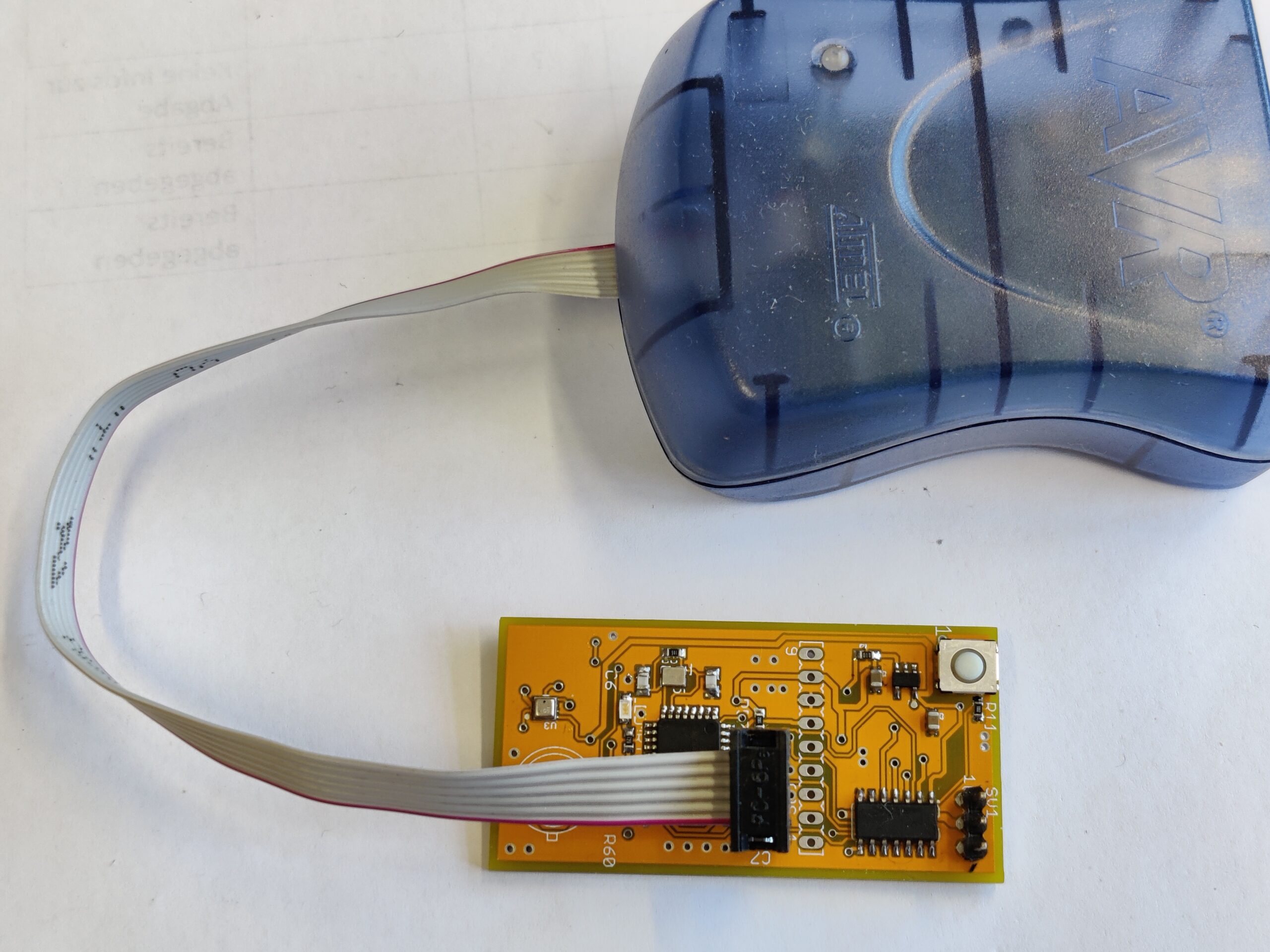
Wie die Platine nach der Bestückung aussieht, zeigen die beiden Bilder oben. Das folgende Foto zeigt den Größenunterschied des fertigen Loggers mit dem aufgesteckten GPS Modul im Vergleich zum alten „Wetterfrosch“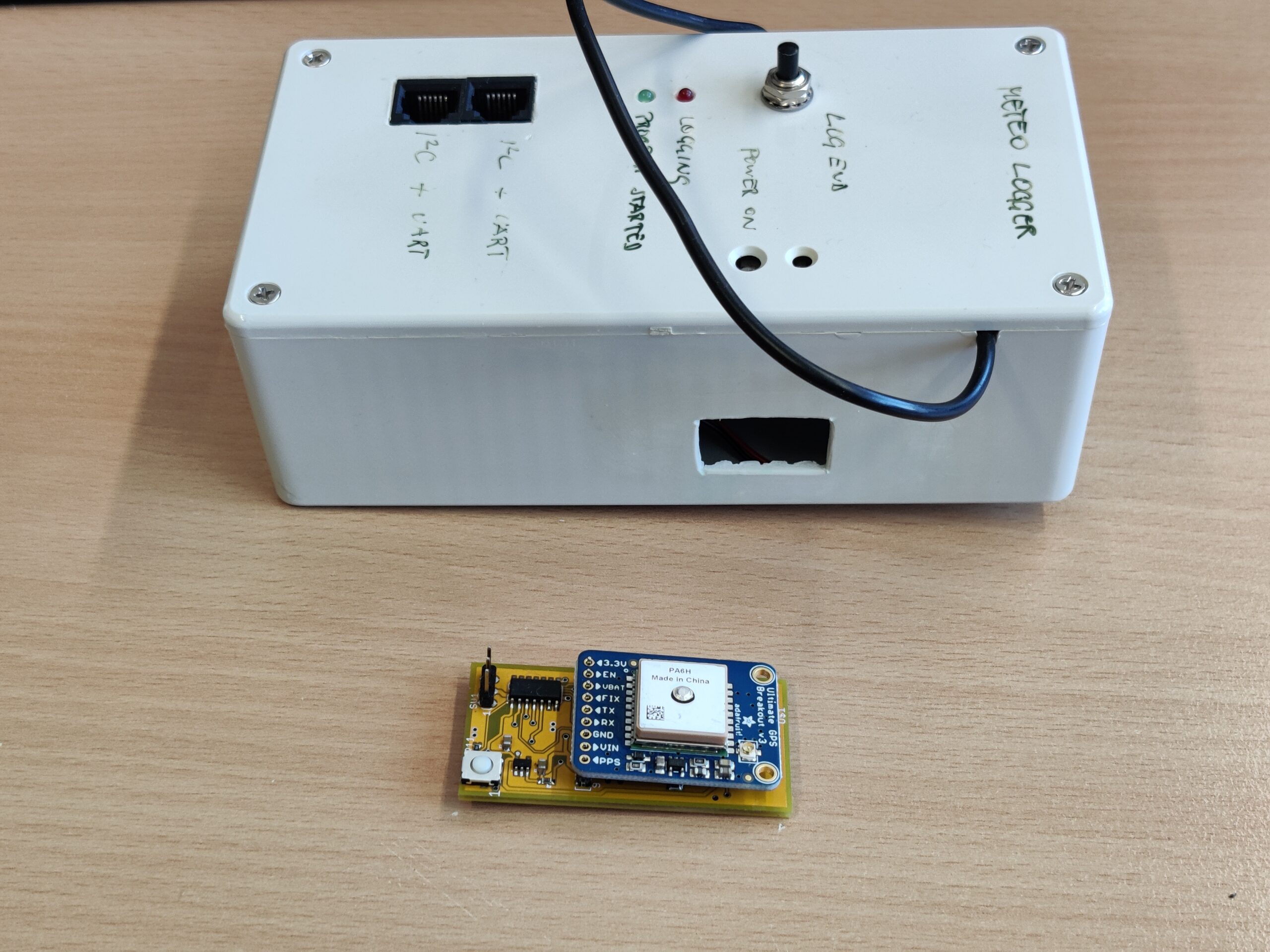 Nach der Fertigstellung der Hardware, geht es nun an die Software. Die habe ich praktischer Weise mit dem Arduino IDE Tool gebastelt und per AVRISP mk2 über ISP auf den Controller geflashed. Um den AVRISP auf einem Windows 10 Rechner zum Laufen zu bekommen, muss ein geeigneter Treiber installiert sein. (hier hilft libusb-win32-1.2.6.0)
Nach der Fertigstellung der Hardware, geht es nun an die Software. Die habe ich praktischer Weise mit dem Arduino IDE Tool gebastelt und per AVRISP mk2 über ISP auf den Controller geflashed. Um den AVRISP auf einem Windows 10 Rechner zum Laufen zu bekommen, muss ein geeigneter Treiber installiert sein. (hier hilft libusb-win32-1.2.6.0)
Auf der SD-Karte wird nach Anlegen der Versorgungsspannung und nach Betätigen des Tasters die Datenaufzeichnung gestartet. Die Messwerte werden im Sekundentakt geschrieben. Wenn, wie in diesem Beispiel der GPS-Sensor gesteckt ist, so werden auch die GPS Daten mit aufgezeichnet. Die Software zeichnet auch auf, wenn der GPS Sensor noch keinen „fix“ hat. (Da in dem Beispiellog unten noch kein GPS-Fix vorhanden war, sind auch keine gültigen GPS Daten enthalten.)
Beispiel des Datenlogs:
Luftdruck962.41 Luftfeuchte37.05 Temperatur26.96 ----------------------------- $PGACK,103*40 $PGACK,105*46 $PMTK011,MTKGPS*08 $PMTK010,001*$GPGGA,235947.799,,,,,0,00,,,M,,M,,*71 $GPGLL,,,,,235947.799,V,N*73 $GPGSA,A,1,,,,,,,,,,,,,,,*1E $GPGSV,1,1,00*79 $GPRMC,235947.799,V,,,,,0.00,0.00,050180,,,N*48 $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32 $GPGGA,235948.799,,,,,0,00,,,M,,M ----------------------------- Luftdruck962.39 Luftfeuchte36.72 Temperatur26.95 ----------------------------- Luftdruck962.43 Luftfeuchte36.66 Temperatur26.97 -----------------------------