Der Olympus Pearlcorder L200 ist ein analoges Diktiergerät mit Microcassette als Aufzeichnungsmedium. Das Modell stammt aus dem Jahr 1983 und wurde von der japanischen Firma Olympus hergestellt. Das ansprechende Design und die Vielzahl an technischen Raffinessen bescherten dem Modell einen derartigen Erfolg, sodass es heute, über 30 Jahre später, bei vielen Besitzern noch immer im Einsatz ist. Der kleine Recorder kann das Band mit zwei Geschwindigkeiten betreiben, 1.2 und 2.4 cm/s. Das ermöglicht Aufzeichnungszeiten von 120 min bei 1.2cm/s mit einer MC60 Microcassette. Das Laufwerk besitzt eine Auto-Stop-Funktion, es kann im Play Modus vor- und rückgespult werden. Eine CUE-Mark Taste zeichnet einen Markierungston auf das Band auf, sodass diese Positionen am Band beim Spulen der Kassette automatisch angefahren werden können. Die Aufzeichnung kann per „voice-activation“ erfolgen (VCVA). Das bedeutet, das Gerät befindet sich im Pause Modus und wird durch Überschreiten eines einstellbaren Schallpegels gestartet. Ein kleines Bandzählwerk ist ebenfalls an Board. Die Energieversorgung kommt aus zwei „AAA“ Batterien. Es gibt aber auch eine Netzteilbuchse für den Anschluss externer Energiequellen.
Technische Daten:
Tonband: Microcassette
Tonspur: 2 Spuren, 1 Kanal monophonisch
Antriebssystem: Capstan
Bandgeschwindigkeit: 2,4cm/s, 1.2cm/s
Schnellwiedergabe: In der F.PLAY Betriebsart läuft das Band etwa 30% schneller als normal
Programmwahl: Mittels CUE MARK Signal
Sprachaktivierung: Kontinuierlich einstellbar mittels VOLUME-Regler in VCVA-Aufnahmebetriebsart
Lautsprecher: 28mm dynamisch
Stromversorgung: Speisespannung 3V Gleichstrom (2.2 bis 3.5V)
Batterien: 2×1,5V „AAA“
Netzadapter: 3V Gleichstrom
Praktisch Max Ausgangsleistung: 220mW (2.4cm/s)
Ohrhörerbuchse 2,5mm 2kOhm
Frequenzbereich: 400-6000Hz (2.4cm/s)
Abmessungen: 107.4×51.4×13.9 mm
Gewicht: 125g mit Batterien
Die Mikrokassette (auch MC) ist eine kleine Version der Compact Kassette (auch bekannt aus Audiokassette). Sie wurde von Olympus entwickelt und erstmals 1969 vorgestellt. Durch die langsamere Bandgeschwindigkeit von 1,2 und 2.4 cm/s gegenüber 4,75 cm/s bei normalen Audiokassetten ergeben sich schlechtere Klangeigenschaften. Die obere Frequenzgrenze liegt bei Microcassetten bei ca. 6-7kHz. Daher werden sie hauptsächlich zur Aufnahme von Sprache verwendet. Anrufbeantworter und Diktiergeräte sind die typischen Anwendungen. Bei Kassetten der Größe MC60 beträgt die Kapazität 30 Minuten pro Seite bei 2,4 cm/s. Die Größen MC15, MC30 und MC90 waren ebenso erhältlich.
Ansicht des Pearlcorders bei entferntem Gehäusedeckel.
Alle elektronischen Komponenten sind auf einer sehr dünnen, schon fast flexiblen Printplatte untergebracht. Ein Service oder eine Reparatur erfordert hier schon ein wenig Geschick um nichts zu beschädigen. Nach den vielen Jahren ist ein Service allerdings schon fast unumgänglich, da zumindest die Antriebsriemen spröde und brüchig sind, da die Weichmacher des Kunststoffs das Weite gesucht haben. Auch Staub und Verunreinigungen an der Antriebseinheit, Ton Welle etc. sollten entfernt werden.
Nahaufnahme des Tonkopfes und der Andruckrolle.
Die Oberseite des Pearlcorders beherbergt den Lautstärkeregler, Pause Taste, Mikrofon- und Ohrhörer Anschluß, die CUE-MARK Taste und den Betriebsmodus Schalter. Rechts oben ist das eingebaute Mikrofon zu erkennen.
Seitlich sind die Bedientasten für das Bandlaufwerk angeordnet.
Die Anzahl der Erweitungsmöglichkeiten sind auf dieser Zeichnung dargestellt.
Sehr günstig und als defektes Bastlergerät habe ich diesmal dieses schmucke Teil erworben. Es handelt sich um einen Easote Sim7000 Challenge Ultraschallscanner, der in der Medizintechnik eingesetzt wurde. Das Gerät stammt aus dem Jahr 1998, hat in etwa die Größe eines alten PC-Gehäuses mit einer integrierten Tastatur und einem Trackball und wiegt knappe zehn Kilogramm. Ein eingebauter 10 Zoll Monochrommonitor ermöglicht das Arbeiten ohne weitere externe Geräte. Mitgeliefert wurde auch eine, als defekt markierte Ultraschallsonde der Type 5075 AA-C. Also ran an den „Speck“ und sehen, ob man das nicht reparieren kann. Ein kurzer Funktionstest zeigt, dass die Sonde zwar prinzipiell arbeitet, aber ein absolut verwischtes Bild produziert. Diejenigen, die das Prinzip des Filmprojektors noch kennen, können sich das in etwa wie einen Film vorstellen, der ohne Verschluss an der Projektionslinse vorbeigezogen wird…
Zum Prinzip der bildgebenden Ultraschallmessung:
(Quelle: Internet und Publikationen aus Fachzeitschriften) Das menschliche Ohr kann Töne mit Frequenzen von ca. 20 Hz bis 20 kHz hören. Schallwellen, die jenseits der Wahrnehmungsfähigkeit des menschlichen Gehörs liegen und einen Frequenzbereich von 20 kHz bis mehrere hundert MHz umfassen, bezeichnet man als Ultraschall).
Die Intensität von Schallwellen wird in Watt pro cm² gemessen und ist ein Maß für den Energieinhalt der Wellen. Bei der Absorption im Gewebe werden Schallwellen in Wärme umgewandelt und können dementsprechend eine Temperaturerhöhung bewirken. In enger Beziehung zur Energie der Ultraschallwellen steht der Schalldruck. Die Schallwelle erzeugt periodisch einen Unterdruck und einen Überdruck. Sehr hoher Unterdruck kann im Gewebe Gasblasen erzeugen (Kavitation) und nachfolgend zu Gewebeschäden führen. Daher gibt es Grenzwerte für den Schalldruck, der in der Einheit Pa (Pascal) gemessen wird. Die Schalldrücke im Gewebe bei diagnostischen Verfahren liegen üblicherweise unter 0,5 MPa. Die Eindringtiefe von Ultraschallwellen in das Gewebe ist bei niedrigen Frequenzen höher und nimmt mit höheren Frequenzen ab. Bei therapeutischen Anwendungen, bei denen es vor allem auf die thermische und mechanische Wirkung ankommt, werden Frequenzen zwischen 20 KHz und 800 KHz bevorzugt, in der Diagnostik zwischen 1 und 40 MHz.
Die bildgebende Ultraschalldiagnostik nutzt die Eigenschaft der Schallreflexion. Diese variiert in Intensität und Phase in Abhängigkeit der Dichte der Medien. Laufzeit, Amplitude und Phase der reflektierten Welle zur ausgesendeten Welle bilden die Grundlage zur elektronischen Erfassung und Darstellung des Schallbildes. Um das Schallbild auch zweidimensional darstellen zu können, muß die Schallwelle in einer Ebene zusätzlich noch mit ausreichender Geschwindigkeit gelenkt werden. Dies geschieht bei einem mechanischen Schallkopf mit Hilfe eines elektrischen Antriebes. Modernere Schallköpfe haben eine Reihe an Schallgebern nebeneinander angeordnet (Array), die je nach Anzahl eine entsprechend hohe Zeilenauflösung darstellen können. Die Eindringtiefe der Schallwellen ist, wie oben erwähnt, von der Frequenz der Welle abhängig. Grundsätzlich gilt: je höher die Frequenz, desto weniger tief dringt die Welle ins Gewebe ein. Oder anders ausgedrückt: je länger die Welle (Wellenlänge) desto tiefer. (bekanntlich gilt ja: λ = c/f wobei c die Schallausbreitungsgeschwindigkeit des Mediums ist. Als Vergleich: c(Luft)=343m/s und c(Wasser)=1484m/s)
Ultraschallmedien (Quelle: Fachzeitschriften) Um stärkere Schallreflexionen an der Grenzfläche zwischen Schallkopf und Haut – bedingt durch dazwischen eingelagerte Luft – zu vermeiden, werden Ultraschallmedien verwendet. Sie stellen den optimalen Kontakt zwischen Schallkopf und Haut her. Ultraschallmedien dürfen ebenfalls keine Luftbläschen enthalten, um den möglichst lückenlosen Schallübergang zu gewährleisten. Flüssigkeiten wie Wasser und Alkohole wären prinzipiell zwar geeignet; aufgrund ihrer Flüchtigkeit und niedrigen Viskosität sind sie aber sehr unpraktisch. Daher wurden spezielle Gele entwickelt. Gele sind nichts anders als Flüssigkeiten, die mittels eines Verdickungsmittels bequem auf der Haut verteilbar sind. Man unterscheidet zwischen Hydrogelen und Lipogelen (Oleogele). Lipogele bestehen aus Ölen pflanzlicher, synthetischer oder mineralischer (Erdöl) Herkunft. Sie sind weniger geeignet, da sie fetten und nach der Behandlung nur mühsam zu entfernen sind. Hauptkomponente der Hydrogele ist – wie der Name schon andeutet – Wasser. Daher kann man Hydrogele nach Gebrauch praktisch ohne Rückstand einfach abwischen.
Von dem theoretischen Exkurs nun zur technischen Beschaffenheit und der Fehlersuche:
Zuerst habe ich mich ein wenig über die Ultraschallsonde schlau gemacht. Hierbei handelt es sich um eine mechanische Sektor Ssonde, die bei 3.5 und 5.0MHz arbeitet. Der Kristall ist hier auf einem, in einer Achse beweglichen Kopf (man kann sich eine Wippe vorstellen) montiert, die über einen kleinen Aktuator mittels Bowdenzugs angetrieben wird. Die folgenden Bilder zeigen die Ultraschallsonde in den unterschiedlichen Demontagezuständen.
Die hintere Verschlusskappe ist mit zwei Schrauben befestigt. Diese sind hinter der Silikon Vergussmasse versteckt. Entfernt man die Schrauben, so ist die Kabelzugentlastung auch gelöst und man kann die Steckverbindung abziehen.
Jetzt kann man vier kleine Madenschrauben lösen, die das Abschrauben des Deckels ermöglichen. Um zu den Madenschrauben zu gelangen, muss die Silikonummantelung der Sonde nach vorne abgerollt werden.
Ist das Kabel abgezogen, so kommt darunter eine Platine zum Vorschein. Diese ist wiederum mit zwei Schrauben befestigt. Löst man die Schrauben, so kann auch die Platine abgezogen werden.
Die Anschlussleitung sollte auf Beschädigungen bzw. Verunreinigungen geprüft und gereinigt werden.
Hier ist eine klebrige Masse (ich vermute das Öl bzw. Gel aus dem Inneren des Sonden Kopfes) anhaftend. Diese Verunreinigung lässt sich nach Abstecken des Kabels dann einfach mit Alkohol oder Platinen Reiniger entfernen und reinigen.
Ist die Platine nun abgezogen, so kommen dahinter die Anschluss Stifte zum Vorschein. In der Mitte befindet sich ein Gummipfropfen der den „Öl?-„gefüllten Bereich der Sonde freilegt. Ein Spannring am Gehäuserand hält die Antriebseinheit in Position. Darunter befindet sich ein Dichtring sowie ein O-Ring.
Nun kann das Öl? (falls jemand weiß, welches Material das wirklich ist – ich würde mich freuen, es zu erfahren) – entfernt werden. Ich habe es vorsichtig mit 2ml Spritzen herausgezogen um es aufzuheben und wieder einfüllen zu können.
Das Zeug ist extrem klebrig und zähflüssig. Ich vermute, dass das auch das eigentliche Problem ist. Die Viskosität der Flüssigkeit. Die ist wahrscheinlich aufgrund des Alters zähflüssig geworden und der Schwingkopf kann sich nicht mehr mit seiner Sollgeschwindigkeit bewegen.
Jetzt kann begonnen werden, die Membrane zu lösen. Eigentlich ist die Membrane mit einer, mit Innengewinde versehenen Aluminiumhülse angeschraubt und sollte sich lösen lassen. (Im Bild ist die Membrane das graue Kunststoffhütchen und die Aluminiumhülse im Bereich des Daumens zu sehen.) Leider ist es mir nicht gelungen, diese Verschraubung zu lösen. So musste ich die Membrane quasi aus dem Gewinde heraushebeln. Das wiederum ist mir ganz gut gelungen. Zumindest ist die Membrane nicht gerissen und hat Ihre Dichtheit bewahrt.
Das Innenleben kommt zum Vorschein. In der Spitze der Membrane ist deutlich ein verdickter Klumpen von dem zähflüssigen Medium zu erkennen.
Hier ist der Kristall montiert auf seiner Wippe zu sehen, ebenso der Bowdenzug Antrieb und in der ganz rechten Bildhälfte noch das Gehäuse des Aktuators. Diese komplette Einheit lässt sich übrigens auch wieder mit zwei Miniaturmadenschrauben lösen.
Das ist das gesamte Innenleben des Schallkopfes. Jetzt können alle Leitungen überprüft werden, ob hier irgendwelche mechanischen Beschädigungen vorliegen.
In diesem Fall war keinerlei Beschädigung zu erkennen. Alle Koaxial Leitungen zum Kristall sind in Ordnung. Alle Anschlusspins sind ebenso ok. Der Aktuator funktioniert. Der Bowdenzug ist ebenso ok. Also kann es nur mehr das „Öl?“ sein. Also habe ich die Einheit wieder zusammengebaut.Nach dem Zusammenbau habe ich auch wieder das alte Öl eingefüllt. Das erweist sich als recht mühsam, zumal es lange dauert, die Luftblasen los zu werden. Es geht jedoch wesentlich schneller, wenn man dieses Öl erwärmt (ich habe das mit einem Fön bewerkstelligt). Und genau das hat mich auf eine Idee gebracht, den Schallkopf nach dem Zusammenbau zu erwärmen und das Verhalten nochmals zu testen. Wenn das Öl wirklich merklich dünnflüssiger wird, dann sollte auch die Beweglichkeit der Wippe leichter werden. Gesagt, getan. Zuerst wollte ich jedoch testen, ob der Schallkopf meine Zerlege Prozedur generell überlebt hat. Und ja – er hat. Das Schallbild sieht jetzt schon um einiges besser aus als zuvor. Also habe ich den Versuch mit dem Heißluftfön gestartet. Vorsichtshalber habe ich die obere Temperaturgrenze auf 45° C eingestellt. Und siehe da, das Schallbild wird zunehmend besser. Es ist jetzt ein deutliches Bild zu erkennen. Es wackelt und zittert nur noch ein wenig in der x-Achse – die Ursache ist also doch das Öl. Wenn hier jemand Erfahrung damit hat, oder eine Quelle, wo man die passenden Öle und auch Ersatzteile bekommen kann – ich bin für jede Information dankbar 🙂
Jetzt sind es doch schon zwei Jahre, in denen ich den „Technik- und Retroblog“ mit Beiträgen füttere. Wer hätte das gedacht…
Es haben sich mittlerweile auch schon ein paar Leser hier her verirrt und angefragt, ob ich das eine oder andere Gerät hier vorstellen könne. Wenn es mir möglich ist, werde ich natürlich versuchen es zu realisieren. Die Rubrik mit den Computern der 80er ist leider immer noch leer. Hier fehlt mir noch der „Faden“, wie ich das ganze aufbereiten soll – es schwebt mir auch zu jedem Gerät ein kleines Video vor, in dem die Geräte im lebendigen Zustand gezeigt werden sollen. Wenn dazu jemand Ideen hat, … gerne.
Ein großes Dankeschön möchte ich meinem Kollegen Mario Wehr aussprechen, der mir die WordPress – Umgebung zur Verfügung stellt und so exzellent serviciert!
Update 06/2020: Die übrig gebliebenen Platinen sind verteilt – ich habe jetzt keine mehr.
Info 05/2020: Da ich weitere Zähler an die HomeMatic angebunden habe, musste ich auch wieder Platinen fertigen. Dieses Mal habe ich testweise auf einen fernöstlichen Leiterplattenhersteller zurückgegriffen. Da die Platine sehr klein ist und ich eine Mindestgröße bestellen musste, wurden auch mehrere Boards hergestellt. Also habe ich auch wieder ein paar Platinen übrig…
Mit dem von HomeMatic angebotenen Energiezähler-Erfassungssystem kann man mit Hilfe unterschiedlicher Zählersensoren die Anzeigen- bzw. Zähleinheiten der Energieversorger ablesen und für eigene Datenerfassungssysteme aufbereiten. Dies geschieht auf unterschiedliche Weise. Es kann die Drehscheibe (Ferraris Scheibe) eines Wirbelstromzählers abgetastet werden, oder der Led-Blinkimpuls von modernen elektronischen Zählern, sowie auch mittels Reedkontakt die Zählimpulse der mechanischen Gaszähler. Dies kann alles mit dem HomeMatic Funk-Zähler Erfassungssystem HM-ES-TX-WM bewerkstelligt werden. Für die unterschiedlichen Zählertypen sind unterschiedliche Sensoren erhältlich, die alle über eine 6polige Western-Modular-Steckverbindung angeschlossen werden können. Die Sensortype wird dabei vom Funksender automatisch erkannt und stellt in seinen Softwareeinstellungen die entsprechenden Umrechnungsoptionen (Impulse/kWh, Umdrehungen/kWh, m³/kWh) dar.
Hat man jetzt zum Beispiel einen eigenen elektronischen Subzähler verbaut, so kann natürlich auch mit dem LED-Sensor die Impuls LED abgefragt werden, um so zu den Daten des Zählers zu gelangen. Die meisten elektronischen Hutschienenzähler haben aber auch einen sogenannten S0-Ausgang, der einen potentialfreien (open-collector) Ausgang über Schraubklemmen zur Verfügung stellt. Wenn man die Schaltung des LED-Sensors ein wenig geändert neu aufbaut, so kann der S0-Ausgang des Hutschienenzählers anstelle der Fotodiode angeschlossen werden. Der Sensortyp wird dann weiterhin korrekt erkannt und am Funk-Zähler Erfassungssystem angezeigt.Mit dieser Schaltung erkennt der HM-Sender den LED-Sensor. Anstelle der Fotodiode wird die Kollektor-Emitter-Strecke des Hutschienenzählers angeschlossen.
Die ganze Schaltung wird auf eine kleine Platine gebracht, diese dann geätzt und bestückt. Die Bauteile sind Standard SMD-Teile der Größe 0805. Der Transistor ist ein BC848 und die Spule L1 ist eine Würth Induktivität mit 680nH (Würth Nr. WE7447604)
Mehrere Platinen direkt aus dem Ätzbad… Danach erfolgt der Zuschnitt und das Beschichten mit Lötlack.
Die Platinen sind nun zugeschnitten, lackiert und können jetzt bestückt werden.
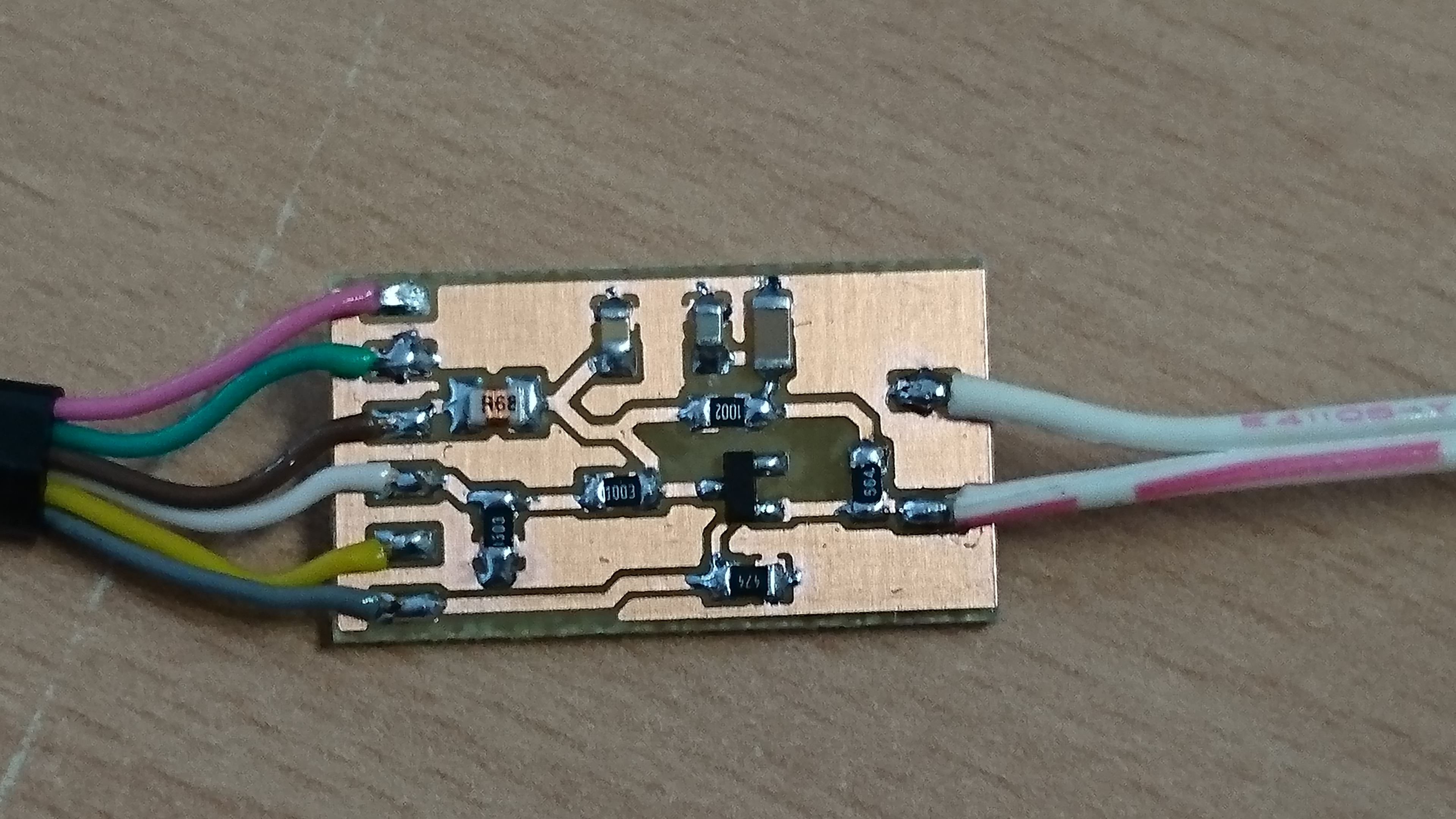
Mit Bauteilen versehen, fehlen jetzt nur mehr die Zuleitungen.
Es sind nun alle Leitungen angelötet. Zum Schutz vor Kurzschlüssen wird die Platine mit einem Schrumpfschlauch überzogen. Jetzt kann alles angeschlossen und eingebaut werden.
An den S0-Ausgang des Hutschienenzählers angeschlossen, kann es dann gleich losgehen. Im Homematic-Funksender oder in den Geräteeinstellungen der CCU2 muss nur mehr die dem Zähler entsprechende Impulsanzahl pro kWh eingestellt werden. Diese Information sind in den Datenblättern des Zählers zu finden. Sie sind aber auch fast immer direkt auf den Zählern zu finden. In diesem Fall erzeugt der Zähler 1600 Impulse/kWh.
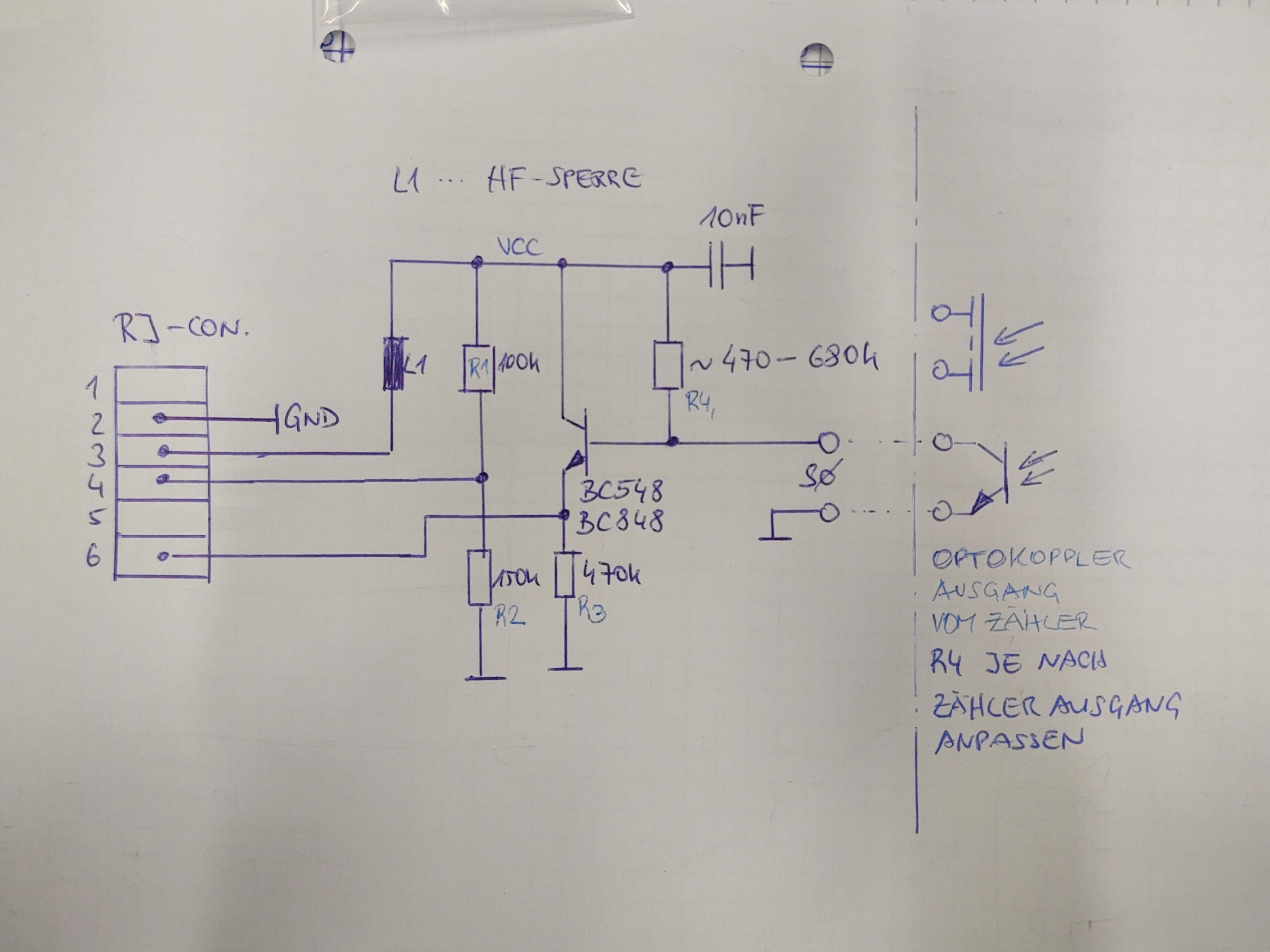
Die Zeichnung oben stellt den Schaltplan des Aufbaus dar. Mit dem Spannungsteiler aus R1 und R2 weiss das Homematicmodul welche Art Sensor angeschlossen ist. Der Transistor schaltet dann die Impulse die vom S0 Ausgang kommen zum Homematic Modul durch.
Ich hatte den Schaltplan aus dem Beitrag herausgenommen, da er nicht allgemeingültig ist und ein paar User den Nachbau nicht zum Laufen brachten. Da viele Hutschienenzähler unterschiedliche Optokopplerausgänge haben (Transitorausgang, FETausgang etc., kann es durchaus möglich sein die Schaltung anzupassen. Ziel ist es jedenfalls, dass der Transistor sauber aus- und eingeschaltet wird, wenn der Schaltimpuls ausgelöst wird…
Edit 07/2019: Nach einigen Anfragen stelle ich eine Skizze der Belegung des RJ12 Stecker (6pol) online.
Edit 02/2021:das Foto mit der Steckerbelegung war seitenverkehrt. Dank des Hinweises von Guido hier nun die korrigierte Skizze:
Funktionstest der Platine:
1. die fertig bestückte Platine über den 6pol RJ Stecker am Homematic-Sensor anstecken
2. Batterien in den Homematic Sensor einlegen.
3. Jetzt muss im Display des Homematic Sensor „LED“ angezeigt werden. (Durch den Spannungsteiler an pin4 wird der Homematic-Sensor in den Modus LED geschaltet)
(Ist der RJ Stecker nicht gesteckt, so muss der HM-Sensor nach dem Batterie einlegen „Err“ anzeigen
4. Durch wiederholtes Überbrücken der Pins TP8 und TP9 (Impulseingang) mit Drahtbrücke etc. können Zählerimpulse simuliert werden – der HM-Sensor muss jetzt auch entsprechend der simulierten Impulse zählen. Diese Aufgabe übernimmt dann der Impulsausgang des Zählers.( Meist ein Transistor oder FET eines Optokopplers)
Der Raspberry Pi in seiner Anwendungsvielfalt wurde bisher immer als kleiner Server, oder Datenlogger, oder auch als TV-Frontend betrieben. Dabei wurde er über seinen HDMI-Ausgang an einen TV oder Monitor angeschlossen. Im Server- bzw. im Datalogger Betrieb war kein externer Monitor notwendig. Sämtliche Einstellungen sind über die Konsole über das Netzwerk durchführbar. Will man den Raspberry aber einmal als – beispielsweise – mobiles, Akku betriebenes Gerät aufbauen, so gibt es eine Vielzahl an Anzeigenelementen und Displays. Von einfachen LC-Displays, die mehrzeilig Zeichen darstellen können, über monochrome Dot-Displays bis hin zu TFT-Farbdisplays in unterschiedlichen Größen ist hier alles erhältlich.
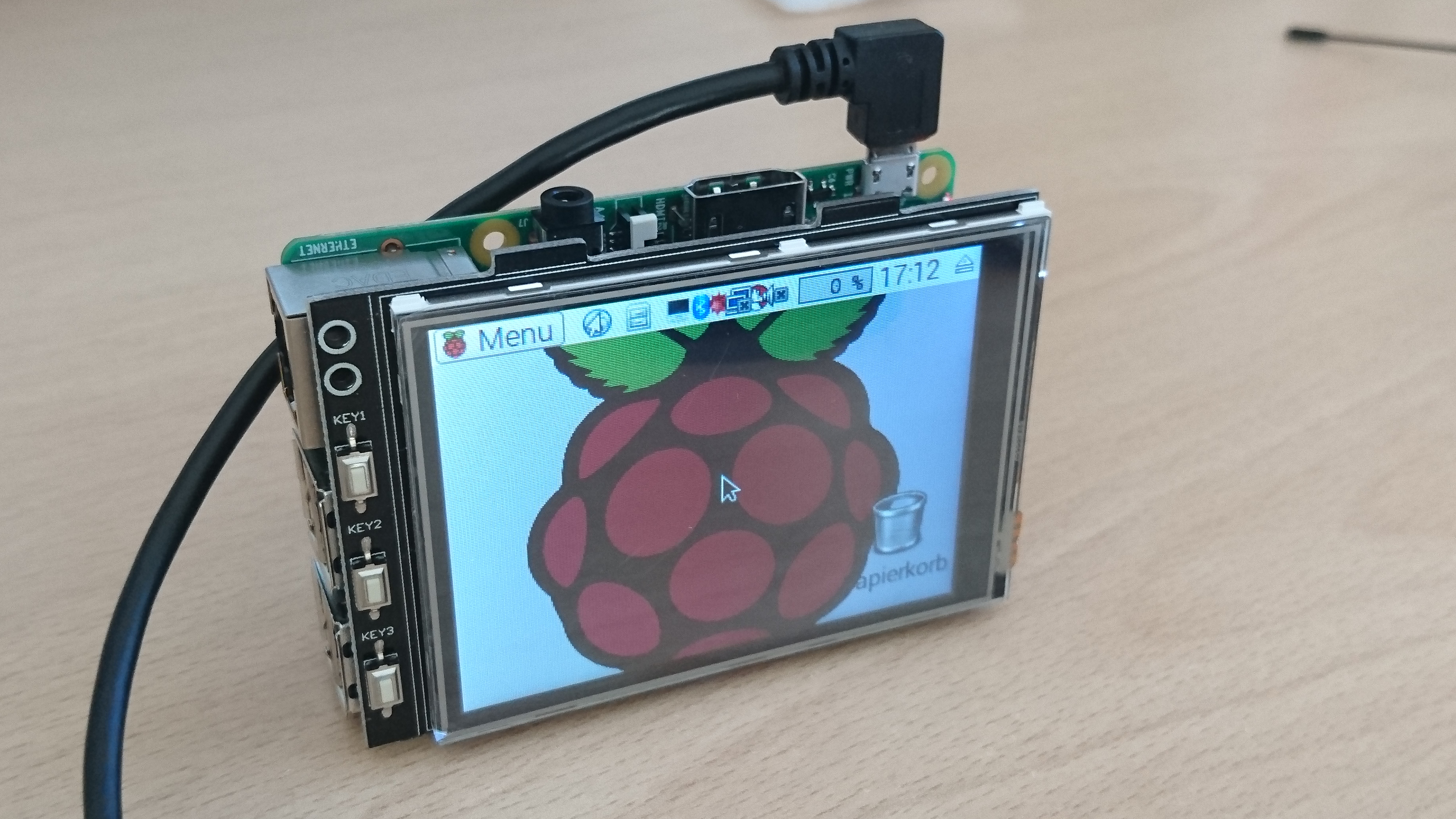
Ich stelle hier das 3,2 Zoll TFT 65k Farbdisplay von „joy-it.net“ vor. Das Display ist mit einem Touchscreen ausgestattet und wird über eine 26-polige Buchsen Leiste direkt auf die GPIO-Pinheader Leiste des Raspberry gesteckt. Weitere Verbindungen sind nicht notwendig. Das Display hat dieselben Abmessungen wie das Raspberry Pi Board und bildet so ein kompaktes, handliches PI-Paket…
Ist das Display aufgesteckt, und auf der SD-Karte ein Raspbian-Image mit graphischer Oberfläche installiert, dann kann es losgehen. Zur Einrichtung des Displays sind noch ein paar Schritte durchzuführen. Nach dem Einschalten wird erst einmal nur die Hintergrundbeleuchtung des Displays hell. Mehr passiert vorerst nicht. Darum verbindet man den Raspberry vorher noch einmal mit einem Monitor über HDMI oder über das Netzwerk mit einem Terminal. Hat man nun Zugriff so wird folgende Datei bearbeitet:
sudo nano /boot/config.txt
Hier sind die folgenden Zeilen am Ende einzufügen:
dtparam=spi=on dtoverlay=waveshare32b:rotate=270
Dann die Datei speichern und den Editor wieder schließen. Jetzt die cmdline.txt bearbeiten: sudo nano /boot/cmdline.txt
An das Ende der Zeile ist folgendes anzufügen:
fbcon=map:10
Und die Datei wieder speichern. Jetzt wird eine neue Datei erstellt: sudo nano /usr/share/X11/xorg.conf.d/99-calibration.conf
Hier die folgenden Zeilen eintippen und die Datei wieder speichern:
Hier ist in der Zeile: Option „fbdev“ „/dev/fb0“ das fb0 in fb1 zu ändern. Das soll dann so aussehen: Option „fbdev“ „/dev/fb1“ Und wieder speichern.
Jetzt in den tmp Ordner wechseln (cd /tmp) und folgende Datei herunterladen: wget http://www.joy-it.net/anleitungen/rpi/tft32b/waveshare32b-overlay.dtb und nach
sudo cp waveshare32b-overlay.dtb /boot/overlays/waveshare32b.dtbo kopieren.
Das war´s dann schon. Mit sudo reboot und angestecktem Display dann neu starten.
Wenn alles geklappt hat, so sollte das Display jetzt arbeiten und der Touchscreen funktionieren.
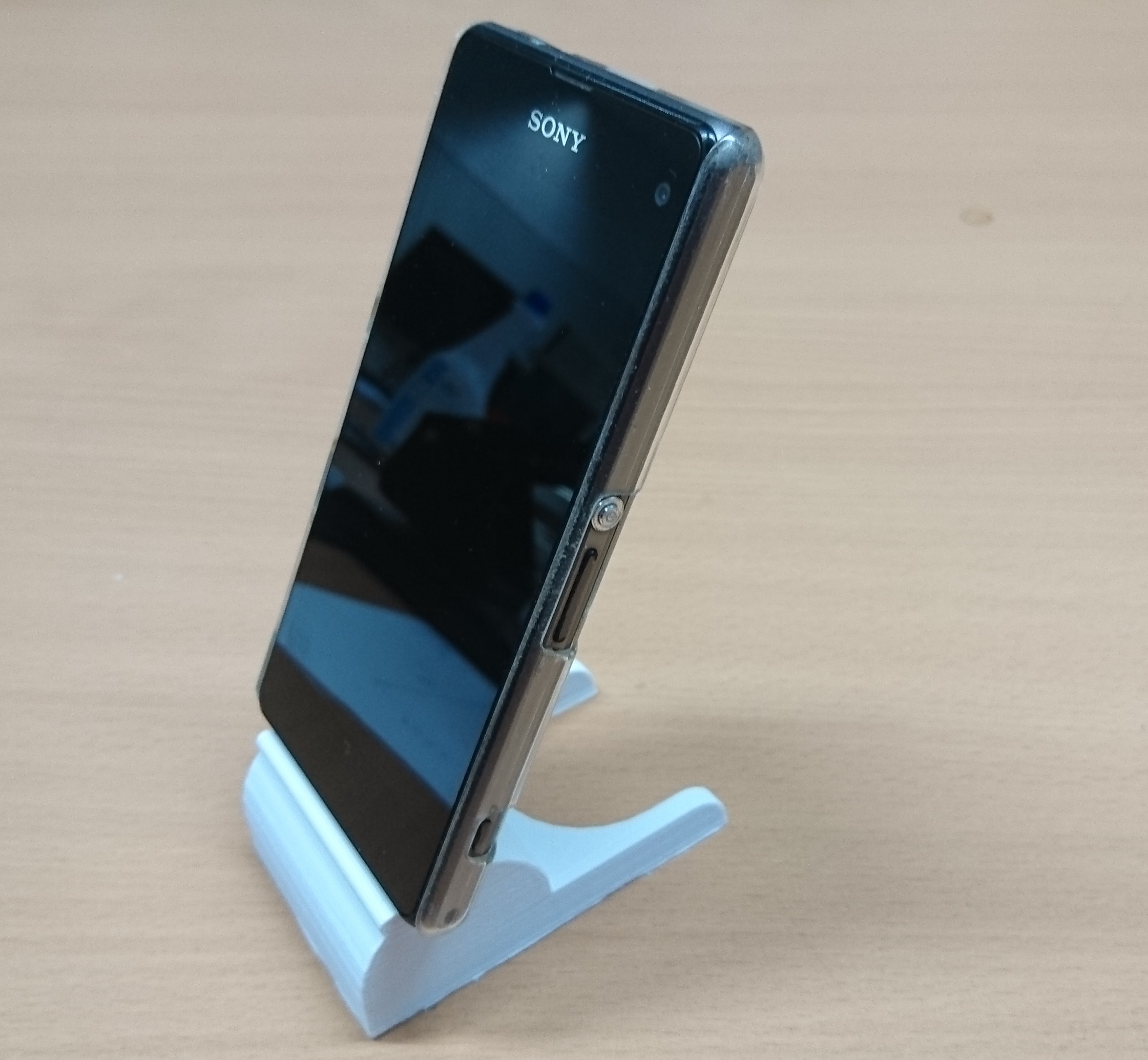
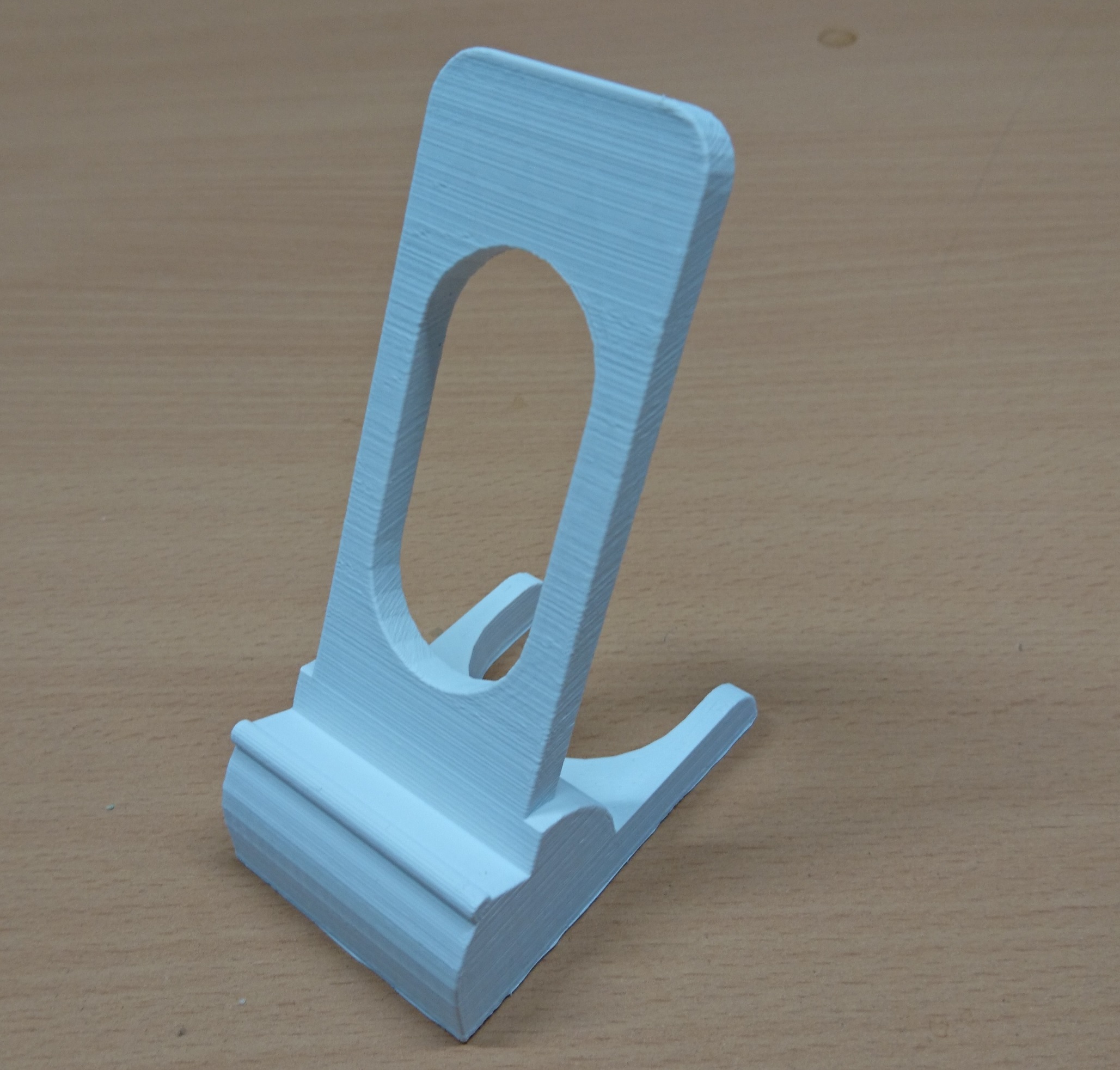
Einfach praktisch ist er schon, der 3D-Drucker. Ein Kunststoff-Filament bis zum flüssigen Zustand erwärmen und mit einem Drei – Achsen – Positionierer den Kunststoff schichtweise auftragen. Das ist ganz das grob beschriebene Prinzip eines 3D-Druckers. Und mit genauso einem Drucker habe ich schlussendlich das hier beschriebene Objekt ausgedruckt. Bei dem verwendeten Drucker handelt es sich um einen Ultimaker 2+, der mit ABS-Filament mit 2.85mm Durchmesser als Druckmedium befüllt ist.
Doch vor dem Ausdrucken muss erst einmal ein Druckmodell her. Hier gibt es im Netz eine Vielfalt an fertigen herunterladbaren Modellen, die direkt gedruckt werden können. Eine Website ist hier zum Beispiel thingiverse. Hier können die Community – Mitglieder ihre Designs und Objekte veröffentlichen und frei zugänglich machen. Doch ich wollte kein fertiges Modell nehmen, sondern den gesamten Designflow einmal von Beginn an durchmachen und testen, ob die, hier bei uns in der Arbeit verwendeten Tools auch zuverlässig funktionieren. Für dieses Testobjekt, einen Telefonaufsteller – oder „Handyhalter“ habe ich folgende Tools verwendet:
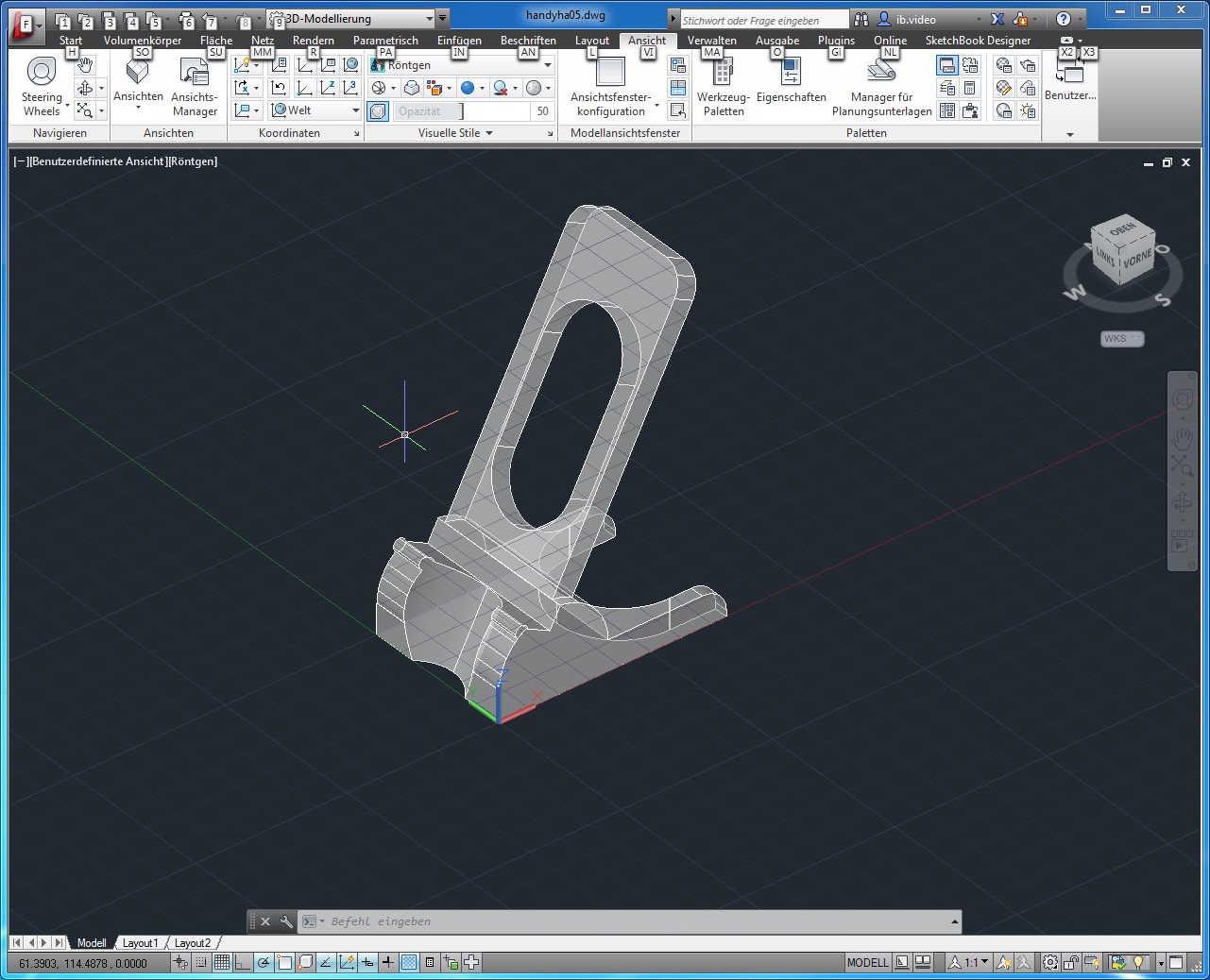
Die 3D – Konstruktion habe ich mit AutoCad 2013 von Autodesk gezeichnet. Hier kamen einfach nur 3D Körper wie Quader und Zylinder zum Einsatz, die durch Addition, Subtraktion und extrudieren von Objekten das gewünschte Ergebnis liefern. Das fertige Objekt wird dann als Stereo-Lithografie-Datei (.stl) exportiert.
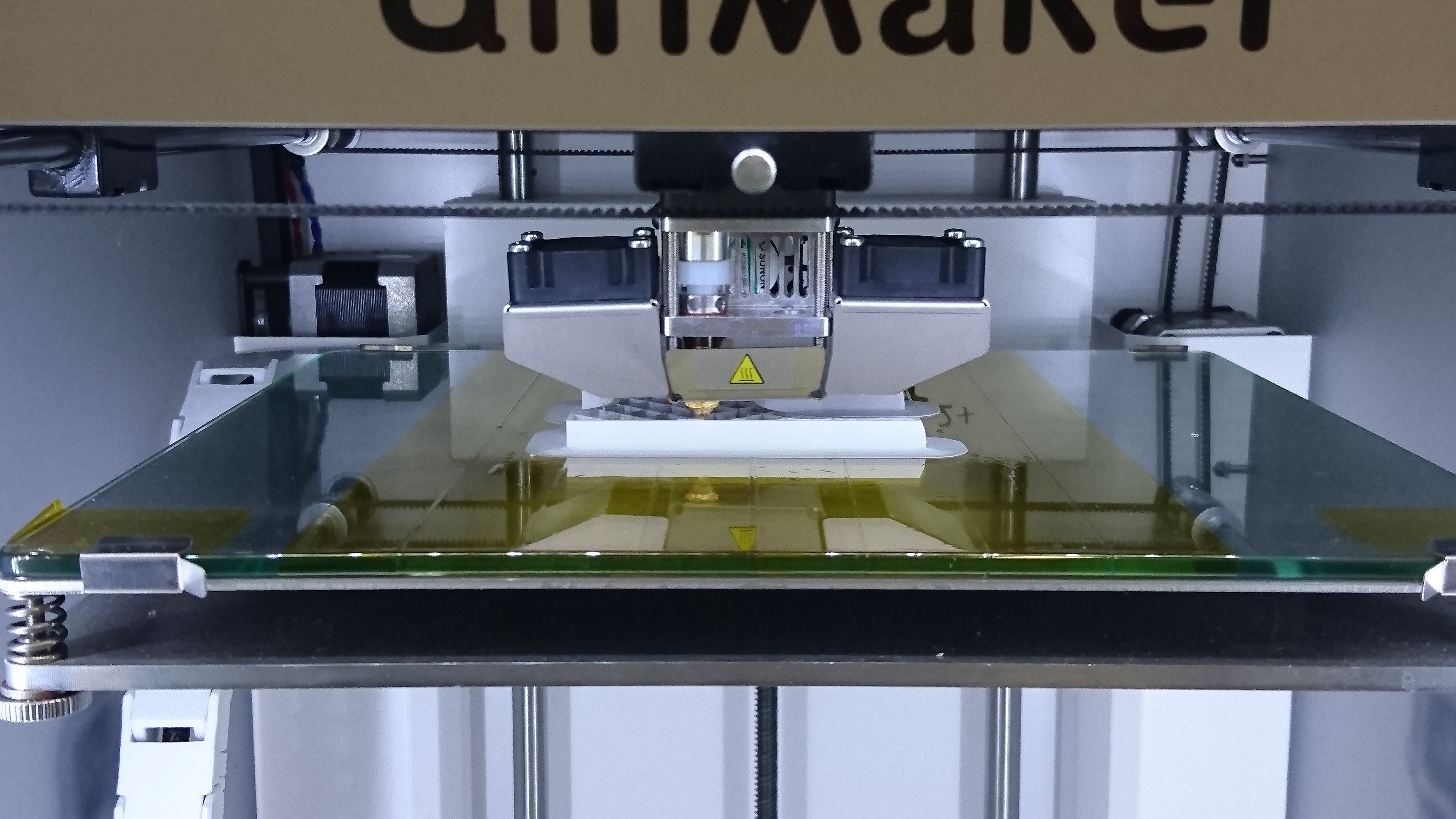
Jetzt kommt die sogenannte Slicer – Software zum Einsatz. Slicer bedeutet sinngemäß so viel wie zerschneiden, aufschneiden. Und nichts anderes macht diese Software. Das dort geladene Druckmodell wird in Schichten zerlegt, so wie sie der Drucker später auch als Kunststoffebene schichtenweise aufträgt. Auch hier gibt es einiges an open-source und freeware Software. Ich habe Cura verwendet. Dieses Slicer-Tool wird auch von Ultimaker angeboten und kann auch direkt mit deren Hardware arbeiten. Im Slicer werden dann einige Parameter festgelegt, die für den Druck dann wichtig sind. Das sind die Temperatur auf die das Filament erwärmt wird, die Plate Temperatur, die Materialvorschubgeschwindigkeit (ist abhängig von der Druckdüse und dem Material selbst), die Druckgeschwindigkeit usw. Hier sind etliche Dinge zu beachten und definieren, die schlussendlich erhebliche Auswirkung auf die Qualität, den Materialverbrauch und die Druckzeit haben…
Der Ultimaker bei der ArbeitDas Modell im Cura-Slicer
Heute stelle ich kurz ein Miniprojekt, das aus gegebenem Anlass entstanden ist, vor. Zum Thema 3D-Druck mit dem Ultimaker 2 Drucker gibt es ja mittlerweile schon tonnenweise Informationen im Web. Auch die Steuerung über einen Webserver (octoprint) samt Webkamera Überwachung ist sehr gut dokumentiert und einfach zu realisieren. So haben es viele selbsternannte 3D-Drucker-Experten einfach, und können auf das umfangreiche Wissen aus dem Web zurückgreifen. An meinem Arbeitsplatz im Labor ist seit kurzem auch ein Ultimaker 2+ Drucker im Einsatz und wird, da ja viele Druckaufträge oft mehrere Stunden bis zur Vollendung benötigen, per Webcam überwacht. Jetzt könnte man den Drucker unbeaufsichtigt drucken lassen und den Raum oder das Gebäude verlassen und den Fortschritt remote überwachen. Doch wenn jetzt etwas nicht nach Plan verläuft und der Druckkopf beispielsweise mit dem Druckobjekt kollidiert oder das Druckobjekt selbst nicht so gedruckt wird, wie es der Slicer vorsieht, dann kann der Drucker nicht per Remote not-abgeschaltet werden.
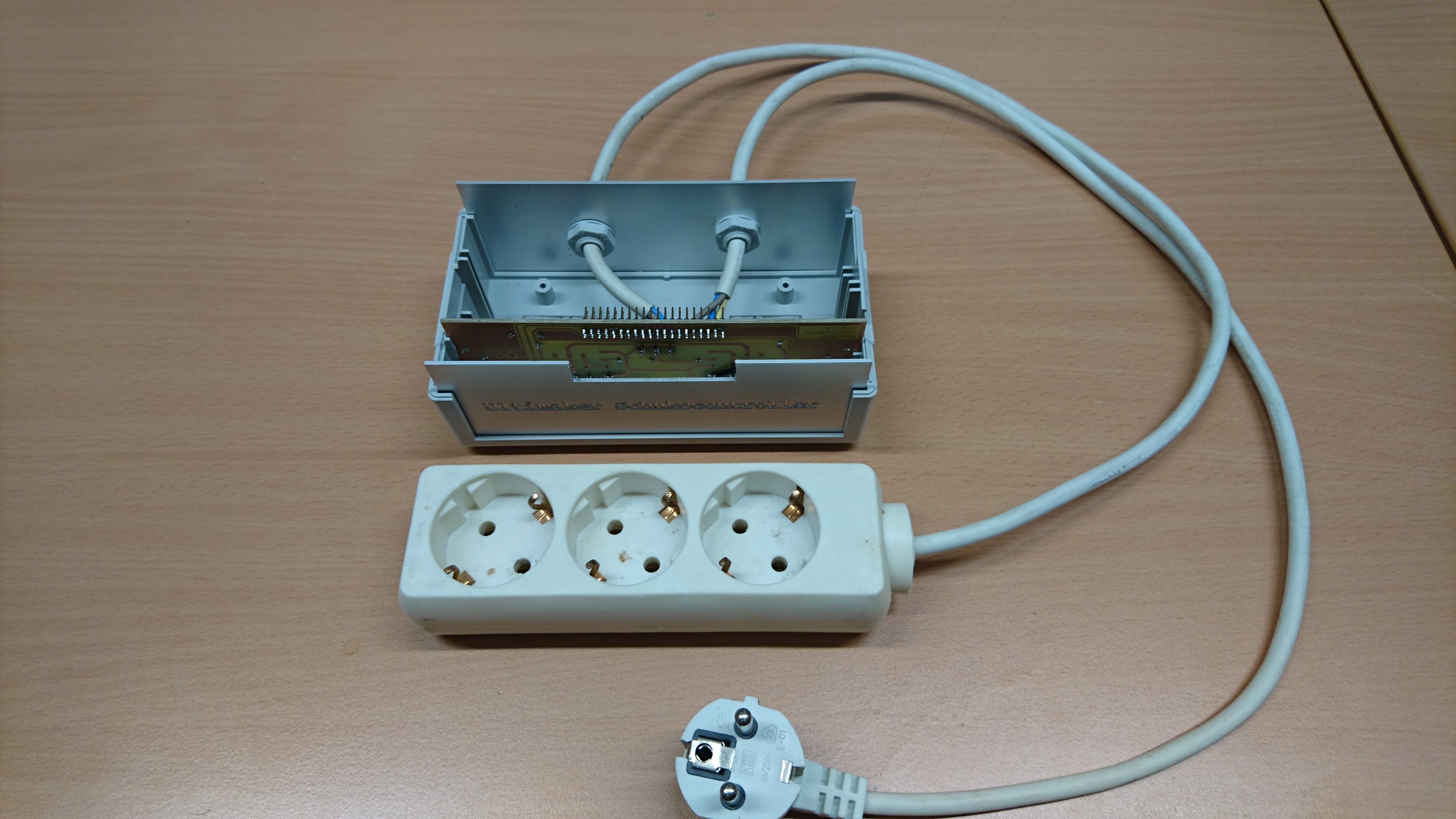
Da der Octoprint – Server nun aber auf einem Raspberry PI läuft, dessen GPIO Port – Pins einfach ungenutzt herumstehen :), bieten sich diese an, ein Interface zu bauen, das im Falle des Falles die Stromversorgung des Druckers abschalten kann. Eine, in ein kleines Kunststoffgehäuse eingebaute Relaisplatine soll an die GPIOs angeschlossen werden. Die Relaiskontakte werden dann daran angeschlossene Schuko Steckdosen schalten. Ich habe die Relaisplatine für vier Kanäle dimensioniert, um nicht nur den Drucker notabschalten zu können, sondern zukünftig auch ein Abluftventilator etc. damit zu schalten. Die Schaltbefehle werden dann direkt am Raspberry, über z.B. Python-Skripten, oder einfach nur bash Kommandos ausgeführt.
Hier ist die supereinfache Schaltung für den Aufbau der Relaiskarte dargestellt:
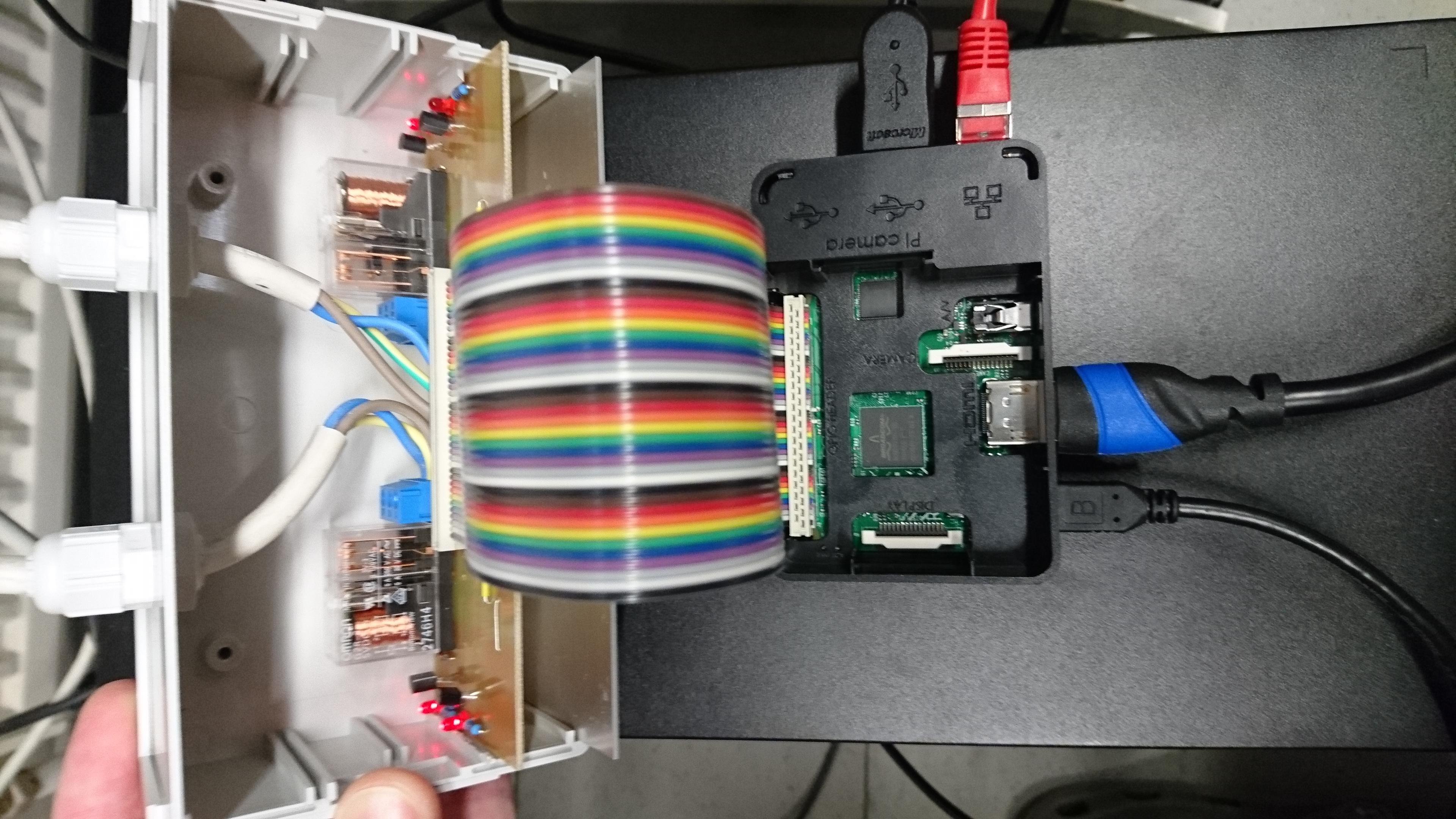
Vom Papier zur fertigen Platine und diese dann in ein Gehäuse eingebaut und per 40poliger Stiftleiste und Flachbandkabel an den Raspberry PI angesteckt, ist im folgenden Bild zu sehen. Als Geräte Bezeichnung ist mir „Ultimaker Schuko Controller“ eingefallen. Da die Aluminium-Frontplatte des Gehäuses wegen der Aussparung für das Flachbandkabel ohnehin in den Fräsbohrplotter musste, habe ich den Schriftzug „Ultimaker Schuko Controller“ auch gleich dort verewigt.
Die Hardware ist nun fertig und mit dem Raspberry verbunden. Als GPIO Pins habe ich, wie im Schaltplan zu erkennen, die GPIOs 08, 23, 24 und 25 verwendet. Als einfachen Test kann man die Relais jetzt über das Terminalfenster des Raspberry (entweder lokal, oder über einen Putty) ganz einfach ansteuern. Als Beispiel ist hier GPIO Pin8 angegeben:
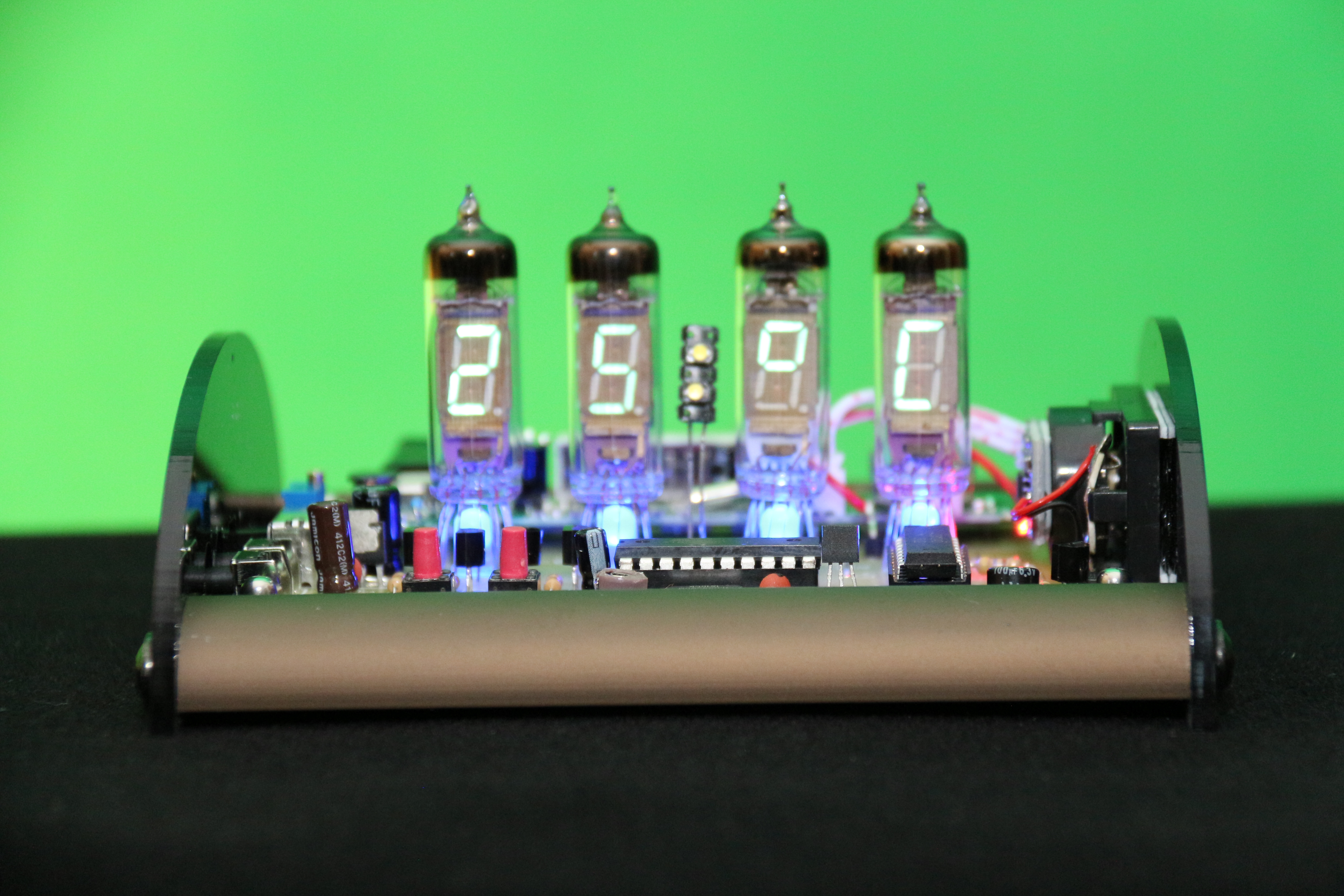
In einem früheren Blogeintrag habe ich einen Uhrenbausatz vorgestellt, dessen Anzeigenelemente mit VFD-Röhren aufgebaut sind. Diese Vakuum-Fluoreszenz-Display Röhren stammen, wie auch die Nixieröhren, aus den 60iger, 70iger Jahren und wurden dann von den LED 7-Segment Anzeigen abgelöst. Doch der Reiz der glimmenden, in Glaskolben verpackten Leuchtziffern erobert heute wieder so manches Wohnzimmerregal. Über den damaligen Beitrag über den VFD – Uhrenbausatz von gr-projects, bin ich mit dem Konstrukteur und Hersteller dieses Bausatzes, Herrn Rother in Kontakt gekommen. Herr Rother hat mir weitere Uhrenmodelle zur Verfügung gestellt, deren Auf- und Zusammenbau ich in Form kurzer Filme aufbereitet und dokumentiert habe. Die verwendeten Anzeigeröhren sind russische Röhren der Typen IV-11, IV-6 und IV-3.
Hier die Infos zu den Röhren:
IV-11:
Glaskolben mit einer Höhe von 55mm und einem Durchmesser von 22mm.
Anzeigehöhe 20x13mm (HxB)
Heizspannung 1,5V bei einem Strom von 50-70mA
Gitterspannung ca 25-30V
Lebensdauer ca. 5000h
IV-6:
Glaskolben mit einer Höhe von 40mm und einem Durchmesser von 12mm.
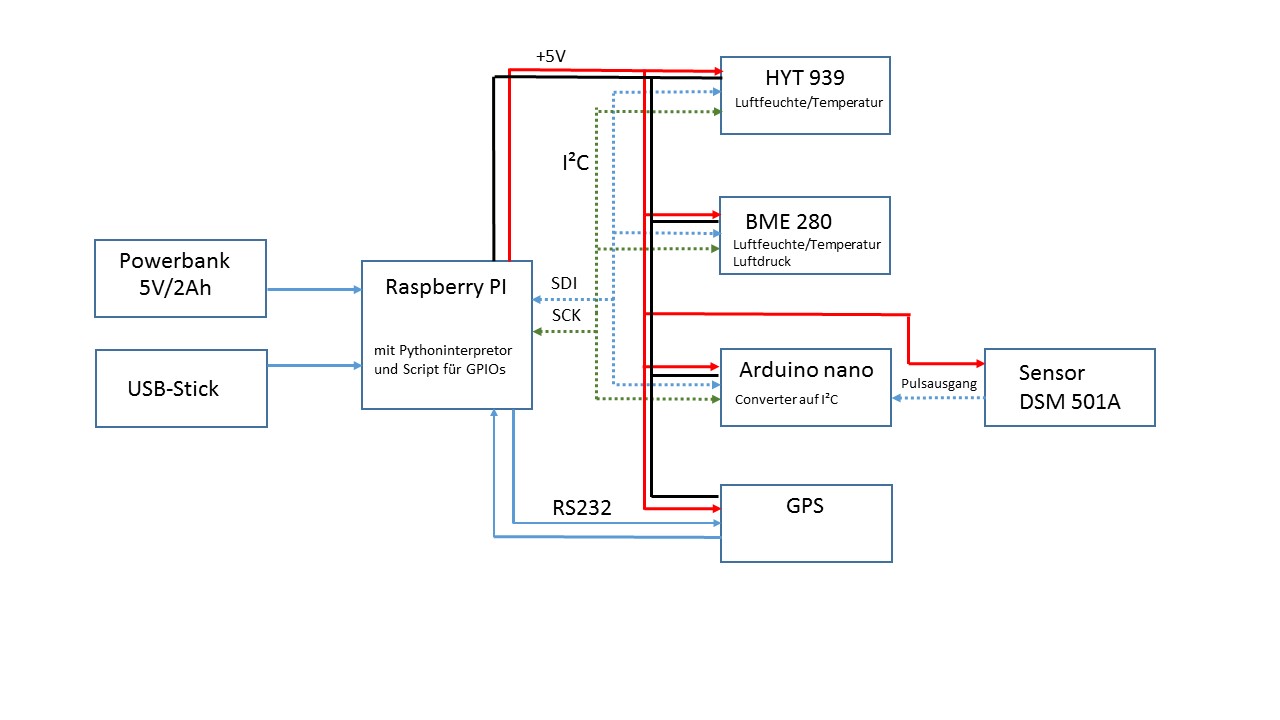
Im letzten Teil des Projektes „Raspberry Pi als Datenlogger“ habe ich einen Raspberry Pi als Datenlogger für unterschiedliche Sensoren konfiguriert. Als Schnittstelle dient der I²C Bus und die RS232 Leitungen, an denen die Sensoren angeschlossen sind. Die Sensoren waren ein HYT939 (Luftfeuchtigkeit und Temperatur), ein BME280 (Luftdruck, Luftfeuchte und Temperatur) sowie ein Ultimate GPS Board an der seriellen Schnittstelle. Der Raspberry Pi ist dabei in eine Box eingebaut, wird mit einer Powerbank, die sich ebenfalls in der Box befindet, versorgt und stellt als Schnittstelle eine 8 polige RJ45 Buchse mit I²C und RS232 nach außen zur Verfügung. An diese Buchse können dann die Sensoren angeschlossen werden. Will man die Sensorik nun ändern, bzw. erweitern, so können einfach weitere I²C Bus – Sensoren angeschlossen werden. Es muss lediglich noch die Software (in diesem Fall Python Skripten) angepasst werden und schon können die Daten des neuen Sensors empfangen und aufgezeichnet werden. Wie aber geht das System um, wenn der Sensor nicht über I²C spricht? Wenn zum Beispiel ein analoger Wert eingelesen werden soll? Ganz einfach: Soll die Hardware des Datenloggers nun nicht mehr modifiziert werden, so muss man einfach dafür sorgen, dass der neue Sensor, der beispielsweise analoge Spannungen ausgibt, diese an eine, nennen wir sie Black Box weitergibt, die wiederum an ihrem Ausgang ein I²C Bussignal bereit stellt. Das kann dann wieder in das bestehende System integriert werden.
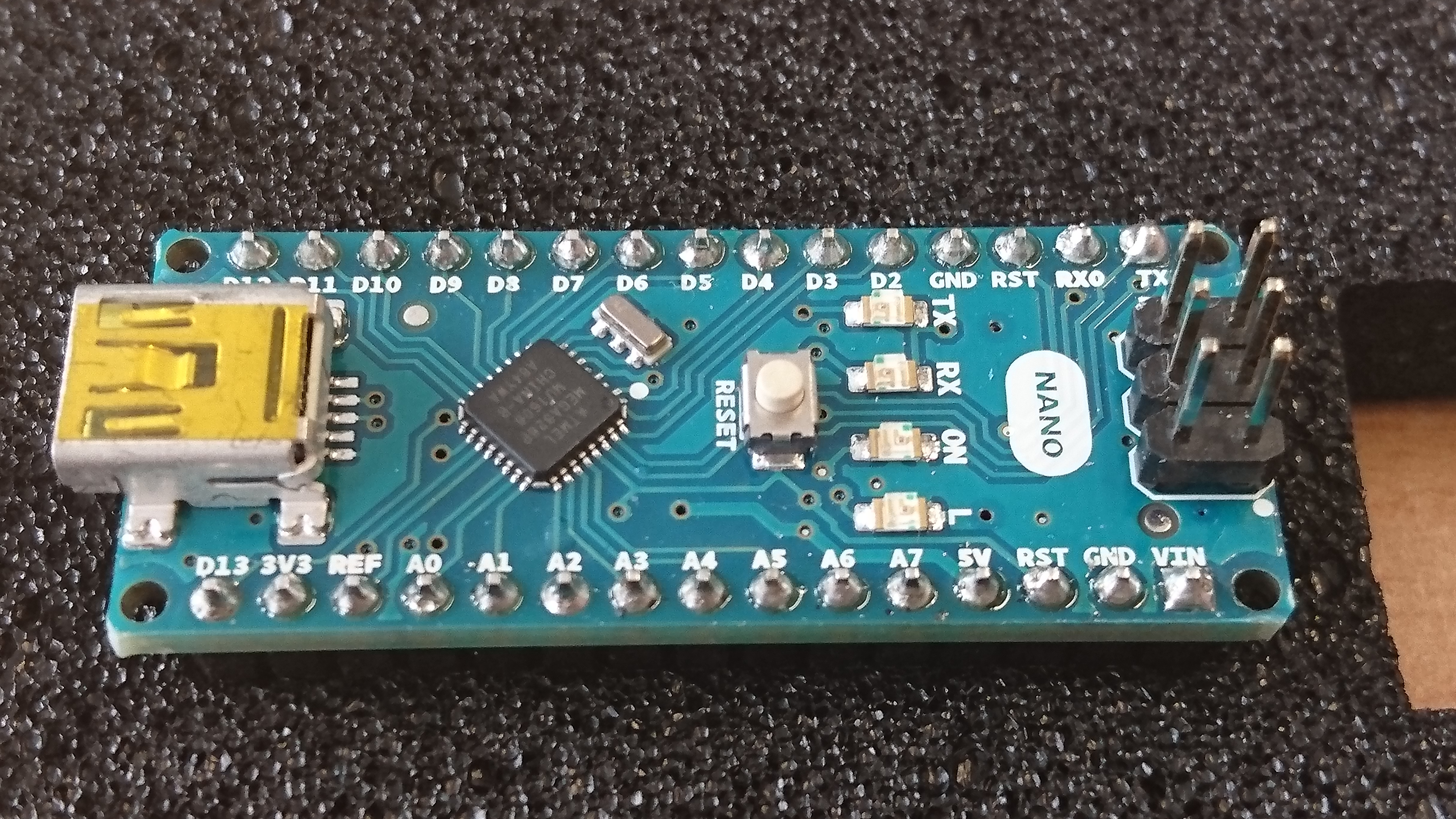
Arduino Nano als I²C Converter
Und genau diese Aufgabe erfüllt ein Microcontroller. Praktischer Weise habe ich diesmal einen Arduino Nano dazu verwendet. Der Arduino Nano mit dem Atmega 328 besitzt ja mehrere analoge und Digitale Eingänge, sowie zwei Interrupts. Über entsprechende Libraries ist einfach das I²C Bus Protokoll zu realisieren. Somit ist das geeignete Black-Box Gerät gefunden.
Der folgende Arduino Code stellt einen einfachen I²C Bus Slave dar. Die Busadresse soll beispielsweise 0x08 sein, von einer Messung haben wir den Messwert 1.3321 erhalten. Dieser Wert soll bei Anfrage an diese Busadresse gesendet werden. Das Beispiel sieht wie folgt aus:
Im Skript ist eine Funktion „dtostrf“ zu sehen. Sie wandelt den Inhalt einer Variablen des Datentyps „floating point“ in ein Charakter Array um. Infos sind hier zu sehen. Im Python Interpreter des Raspberry können wir nun überprüfen, ob die Daten ankommen. Doch zuvor soll der gesamte Aufbau einmal schematisch dargestellt werden.
Schematische Darstellung des Systems
Sind alle Sensoren inklusive des Arduino angeschlossen, so kann das folgende Python-Skript aus der Linux Konsole des Raspberry aufgerufen werden:
# Reading data from arduino as sensor slave
# V0.1 by bihlo 09/2016
import smbus, time
bus = smbus.SMBus(1) # Raspberry Rev. 2
address = 0x08 # Fixed default address of Arduino
# Initialize sensor to acquire measurements
#def MeasurementRequest():
# void = bus.write_quick(address)
#time.sleep(0.1)
# Read from bus
def ReadMeasurement():
void= bus.write_quick(address)
time.sleep(0.1)
# Acquire 6 byte from sensor
Readout = bus.read_i2c_block_data(address,0,6)
out=''.join(chr(i) for i in Readout) #byte array von ascii in string wandeln
print "Antwort vom Arduino: ", Readout, " ."
print "Antwort als String: ", out
ReadMeasurement()
Wenn der Python Interpreter jetzt keinen Fehler meldet und der Inhalt der Variable „wert“ des Arduino in ASCII und im Klartext dargestellt wird, dann kann jetzt mit einem „richtigen“ Messwert eines Sensors weiter gearbeitet werden.
Partikeldetektor
Als Sensor soll an an den Arduino ein DSM501 Dust Sensor Module angeschlossen werden. Der DSM501A ist ein Staubsensor, der mit 5V bei einer Stromaufnahme von 90mA betrieben wird. Er erkennt Partikel ab einer durchschnittlichen Größe von 1µm bei einer Konzentration von 0 bis ca. 1.4mg pro Kubikmeter Raumluft. Laut Datenblatt und Herstellerinformationen wird die Luft im Bereich der Messkammer erhitzt, sodass eine Luftzirkulation entsteht. Die sich ständig bewegende Luft wird mit einem getakteten Lichtstrahl beleuchtet. Ein in einem Winkel zur Lichtquelle angebrachter Fotodetektor empfängt nun, im Falle dass sich Partikel im Licht befinden, dessen Streulicht. Die Intensität des Streulichtes ist von der Anzahl und Größe der Partikel abhängig und kann so erfasst werden. Als Ausgangssignal erzeugt der Sensor ein Puls/Pausensignal mit einer Periode von 100ms. Das Verhältnis von High- zu Lowtime stellt nun die Grundlage für die Berechnung der Partikelanzahl bzw. -dichte dar. Über einen Countereingang des Arduino werden die Impulse gemessen und der korrespondierende Partikelwert errechnet. Dieser Wert wird nun wie oben beschrieben als Busdatum für den I2C Bus herangezogen und bei Auslösen des Bus Events übertragen. Somit hat der Arduino die Aufgabe eines einfachen Protokollkonverters übernommen. Mit dieser Methode lassen sich alle möglichen Messwerte so aufbereiten, dass der Raspberry mit einer Schnittstelle damit umgehen kann.
Wie das im Detail funktioniert und wie der Code dazu aussieht, werde ich vielleicht später einmal posten.
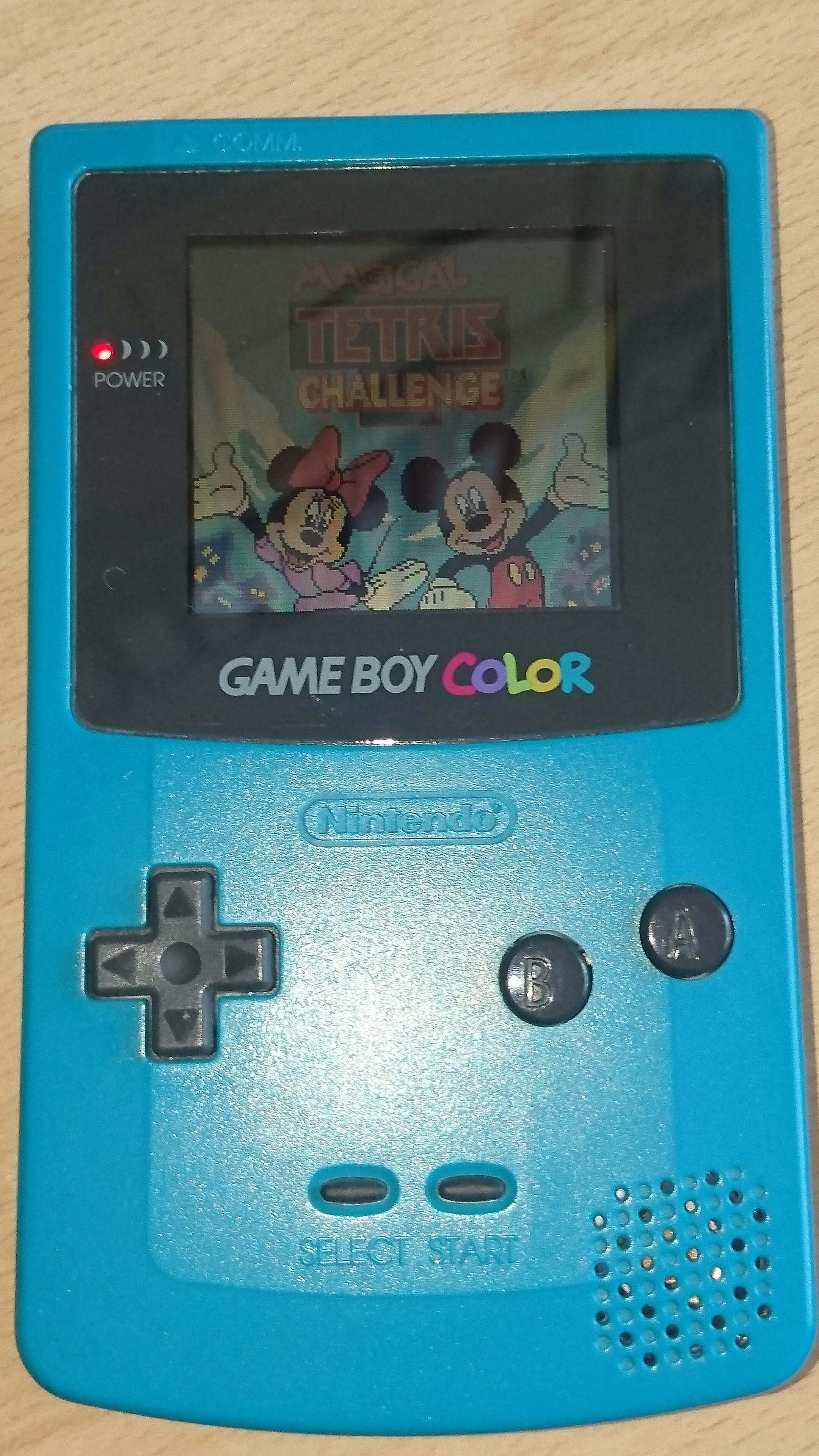
Dieses Mal habe ich wieder ein Stück für die Rubrik Nostalgie Technik aus meiner Altgerätesammlung ausgegraben. Ich bezeichne es zumindest als Nostalgie Technik. Den Game Boy Color. Dabei handelt es sich um eine „Handheld Spielekonsole“ von dem Hersteller Nintendo. Der Game Boy Color wurde von Nintendo Ende des Jahres 1998 auf dem internationalen Markt veröffentlicht. Er ist der Nachfolger des legendären Game Boy mit dem monochromen Display. Der Game Boy Color bekam seinen Namen von seiner Eigenschaft, einen farbigen LCD-Bildschirm zu besitzen. Der Bildschirm hat auch hier, gleich wie sein Vorgänger, noch keine Hintergrundbeleuchtung.
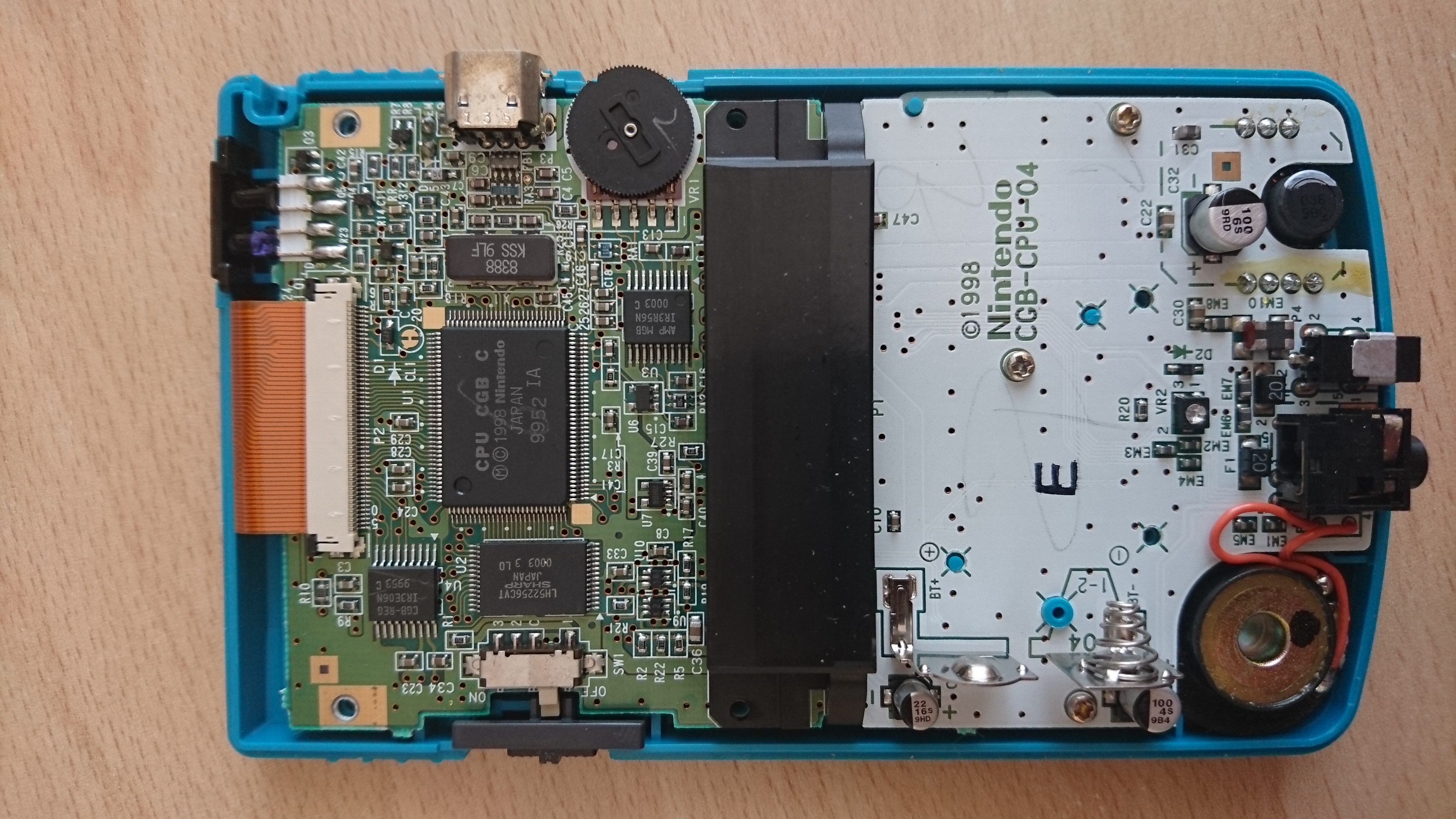
Gleich wie der Ur-Game Boy rechnet in seinem Inneren ein 8-Bit Prozessor von Sharp (LR35902), der auf der Basis des Zilog Z80 aufgebaut ist. Der „color“ wurde bis 2003 hergestellt und wiederum von seinem Nachfolger, dem Game Boy Advance ersetzt. Laut Online-Quellen sind vom Game Boy Color ca. 50 Millionen Stück verkauft worden.
Hier nun die technischen Details:
CPU: Sharp LR35902 (8bit CPU auf Basis des Z80)
CPU Geschwindigkeit 4MHz/8MHz (4.338 bzw. 8.338MHz)
RAM: 32kB
VRAM: 16kB (das Videoram ist in die CPU integriert)
ROM: maximal 8 MB
RAM auf dem Cartridge 128kB
Bildschirmauflösung: 160×144 Pixel bei einer Farbtiefe von 15bit (32768)
Gleichzeitig auf dem Bildschirm darstellbare Farben: 10, 32, 56
Sprites: 40 max, 10 pro Zeile bei 4 Farben pro Sprite 8×8 bzw. 16×16 Pixel Spritegröße
Schnittstellen: Serial I/O Port mit 512kbit/s, Infrarot I/O, Cartridge I/O zur Aufnahme der Spiele-ROMS
Abmessungen: 133x75mm, 27 mm Dick
Gameboy Color InnenlebenSeitenansicht linksRückseiteMainboard NahaufnahmeNahaufnahme BildschirmSpielmodul (Cartridge)
Die Gameboy Spiele Cartridges sind auch im Gameboy Color spielbar. Die Module beherbergen einen ROM-Baustein mit dem Spiele-Code, einen SRAM-Baustein, sowie auch bei vielen Modulen eine Backup Batterie in (CR1616), die den Status des SRAM bei stromlosem, oder ausgesteckten Modul aufrecht hält. Über den Cartridge Steckplatz lässt sich der Gameboy und Gameboy Color auch für andere Anwendungen, außer Spielen, nutzen. Hier haben einige Entwickler und Bastler Module gebaut, mit denen der Gameboy zum Messgerät wird, die Software im Bereich Autotuning modifizieren kann, oder als programmierbare Steuerung fungiert. Es existieren hunderte Spieltitel für die Gameboy Serie. Der Boom und die Faszination der fernöstlichen Großaugen-Comics hat auch unsere Jugend erreicht und für die Epoche der 90er Jahre geprägt. So sind folgende Spieletitel auf der Liste der meist-verkauften Spiele gelandet. (Quelle: nintendo.wikia)
 Der Olympus Pearlcorder L200 ist ein analoges Diktiergerät mit Microcassette als Aufzeichnungsmedium. Das Modell stammt aus dem Jahr 1983 und wurde von der japanischen Firma Olympus hergestellt. Das ansprechende Design und die Vielzahl an technischen Raffinessen bescherten dem Modell einen derartigen Erfolg, sodass es heute, über 30 Jahre später, bei vielen Besitzern noch immer im Einsatz ist. Der kleine Recorder kann das Band mit zwei Geschwindigkeiten betreiben, 1.2 und 2.4 cm/s. Das ermöglicht Aufzeichnungszeiten von 120 min bei 1.2cm/s mit einer MC60 Microcassette. Das Laufwerk besitzt eine Auto-Stop-Funktion, es kann im Play Modus vor- und rückgespult werden. Eine CUE-Mark Taste zeichnet einen Markierungston auf das Band auf, sodass diese Positionen am Band beim Spulen der Kassette automatisch angefahren werden können. Die Aufzeichnung kann per „voice-activation“ erfolgen (VCVA). Das bedeutet, das Gerät befindet sich im Pause Modus und wird durch Überschreiten eines einstellbaren Schallpegels gestartet. Ein kleines Bandzählwerk ist ebenfalls an Board. Die Energieversorgung kommt aus zwei „AAA“ Batterien. Es gibt aber auch eine Netzteilbuchse für den Anschluss externer Energiequellen.
Der Olympus Pearlcorder L200 ist ein analoges Diktiergerät mit Microcassette als Aufzeichnungsmedium. Das Modell stammt aus dem Jahr 1983 und wurde von der japanischen Firma Olympus hergestellt. Das ansprechende Design und die Vielzahl an technischen Raffinessen bescherten dem Modell einen derartigen Erfolg, sodass es heute, über 30 Jahre später, bei vielen Besitzern noch immer im Einsatz ist. Der kleine Recorder kann das Band mit zwei Geschwindigkeiten betreiben, 1.2 und 2.4 cm/s. Das ermöglicht Aufzeichnungszeiten von 120 min bei 1.2cm/s mit einer MC60 Microcassette. Das Laufwerk besitzt eine Auto-Stop-Funktion, es kann im Play Modus vor- und rückgespult werden. Eine CUE-Mark Taste zeichnet einen Markierungston auf das Band auf, sodass diese Positionen am Band beim Spulen der Kassette automatisch angefahren werden können. Die Aufzeichnung kann per „voice-activation“ erfolgen (VCVA). Das bedeutet, das Gerät befindet sich im Pause Modus und wird durch Überschreiten eines einstellbaren Schallpegels gestartet. Ein kleines Bandzählwerk ist ebenfalls an Board. Die Energieversorgung kommt aus zwei „AAA“ Batterien. Es gibt aber auch eine Netzteilbuchse für den Anschluss externer Energiequellen.  Technische Daten:
Technische Daten:
 Die Mikrokassette (auch MC) ist eine kleine Version der Compact Kassette (auch bekannt aus Audiokassette). Sie wurde von Olympus entwickelt und erstmals 1969 vorgestellt. Durch die langsamere Bandgeschwindigkeit von 1,2 und 2.4 cm/s gegenüber 4,75 cm/s bei normalen Audiokassetten ergeben sich schlechtere Klangeigenschaften. Die obere Frequenzgrenze liegt bei Microcassetten bei ca. 6-7kHz. Daher werden sie hauptsächlich zur Aufnahme von Sprache verwendet. Anrufbeantworter und Diktiergeräte sind die typischen Anwendungen. Bei Kassetten der Größe MC60 beträgt die Kapazität 30 Minuten pro Seite bei 2,4 cm/s. Die Größen MC15, MC30 und MC90 waren ebenso erhältlich.
Die Mikrokassette (auch MC) ist eine kleine Version der Compact Kassette (auch bekannt aus Audiokassette). Sie wurde von Olympus entwickelt und erstmals 1969 vorgestellt. Durch die langsamere Bandgeschwindigkeit von 1,2 und 2.4 cm/s gegenüber 4,75 cm/s bei normalen Audiokassetten ergeben sich schlechtere Klangeigenschaften. Die obere Frequenzgrenze liegt bei Microcassetten bei ca. 6-7kHz. Daher werden sie hauptsächlich zur Aufnahme von Sprache verwendet. Anrufbeantworter und Diktiergeräte sind die typischen Anwendungen. Bei Kassetten der Größe MC60 beträgt die Kapazität 30 Minuten pro Seite bei 2,4 cm/s. Die Größen MC15, MC30 und MC90 waren ebenso erhältlich. Ansicht des Pearlcorders bei entferntem Gehäusedeckel.
Ansicht des Pearlcorders bei entferntem Gehäusedeckel. Alle elektronischen Komponenten sind auf einer sehr dünnen, schon fast flexiblen Printplatte untergebracht. Ein Service oder eine Reparatur erfordert hier schon ein wenig Geschick um nichts zu beschädigen. Nach den vielen Jahren ist ein Service allerdings schon fast unumgänglich, da zumindest die Antriebsriemen spröde und brüchig sind, da die Weichmacher des Kunststoffs das Weite gesucht haben. Auch Staub und Verunreinigungen an der Antriebseinheit, Ton Welle etc. sollten entfernt werden.
Alle elektronischen Komponenten sind auf einer sehr dünnen, schon fast flexiblen Printplatte untergebracht. Ein Service oder eine Reparatur erfordert hier schon ein wenig Geschick um nichts zu beschädigen. Nach den vielen Jahren ist ein Service allerdings schon fast unumgänglich, da zumindest die Antriebsriemen spröde und brüchig sind, da die Weichmacher des Kunststoffs das Weite gesucht haben. Auch Staub und Verunreinigungen an der Antriebseinheit, Ton Welle etc. sollten entfernt werden. Nahaufnahme des Tonkopfes und der Andruckrolle.
Nahaufnahme des Tonkopfes und der Andruckrolle. Die Oberseite des Pearlcorders beherbergt den Lautstärkeregler, Pause Taste, Mikrofon- und Ohrhörer Anschluß, die CUE-MARK Taste und den Betriebsmodus Schalter. Rechts oben ist das eingebaute Mikrofon zu erkennen.
Die Oberseite des Pearlcorders beherbergt den Lautstärkeregler, Pause Taste, Mikrofon- und Ohrhörer Anschluß, die CUE-MARK Taste und den Betriebsmodus Schalter. Rechts oben ist das eingebaute Mikrofon zu erkennen.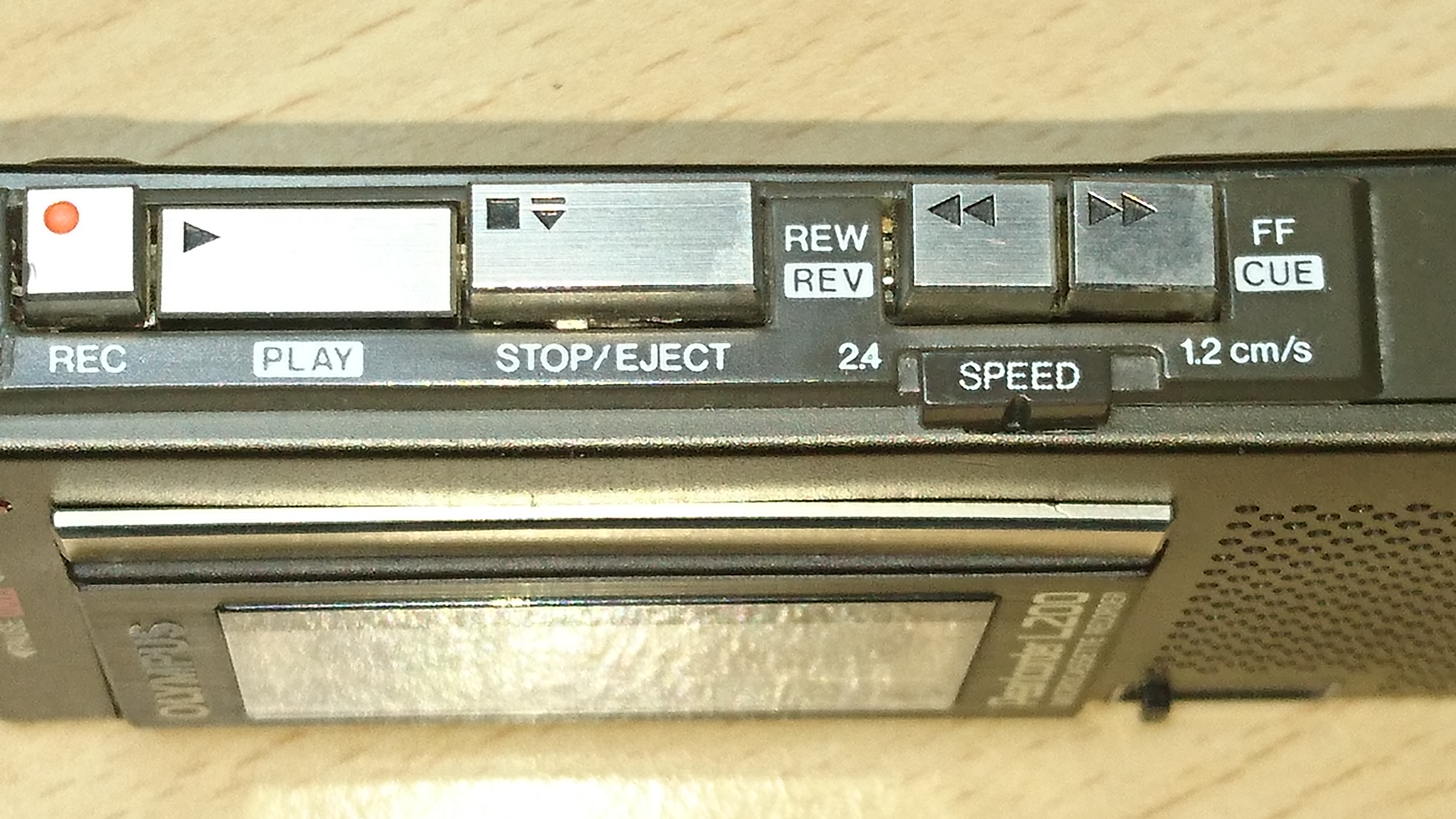 Seitlich sind die Bedientasten für das Bandlaufwerk angeordnet.
Seitlich sind die Bedientasten für das Bandlaufwerk angeordnet. 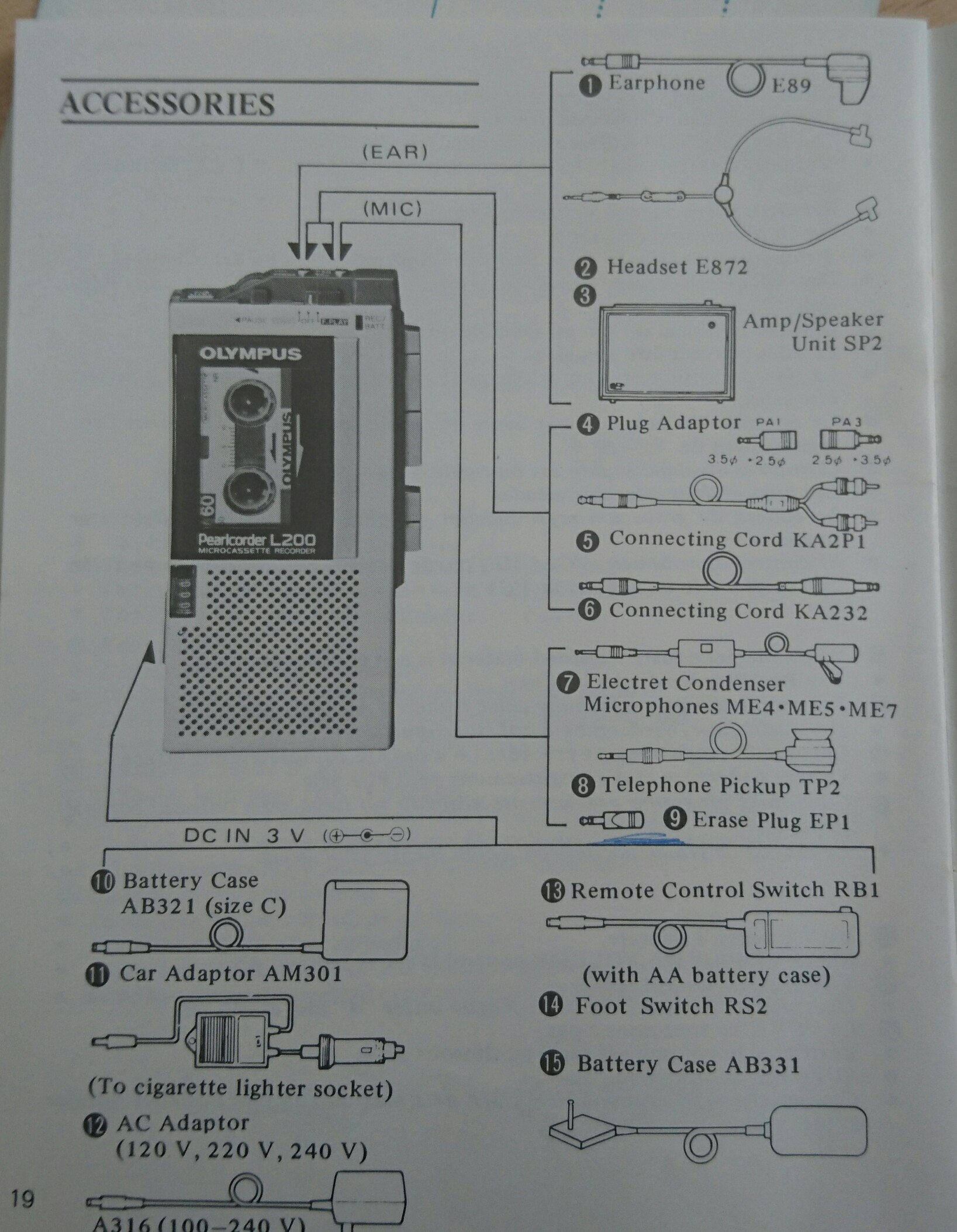 Die Anzahl der Erweitungsmöglichkeiten sind auf dieser Zeichnung dargestellt.
Die Anzahl der Erweitungsmöglichkeiten sind auf dieser Zeichnung dargestellt.