Es gibt Projekte, die entstehen aus einer spontanen Idee, und dann gibt es solche, die sich über Monate hinweg entwickeln. Unser Mini-Arcade-Automat gehört definitiv zur zweiten Kategorie. Alles begann an einem kalten Wintertag, als mein Sohn und ich uns an den Küchentisch setzten, um wieder einmal ein kleines Bastelprojekt zu starten. Damals ahnten wir noch nicht, dass aus einem einfachen Papiermodell irgendwann ein funktionierender Mini-Arcade-Automat werden würde. Doch genau das ist passiert – und in diesem Beitrag möchte ich euch Schritt für Schritt mitnehmen, wie wir dieses Projekt umgesetzt haben.
Die Inspiration: Ein Arcade-Automat aus Papier Die Idee, einen Mini Arcade-Automaten zu bauen, kam uns ganz spontan. Ich habe ja schon vor einigen Jahren einen Tabletop- bzw. Bartop Arcade Automaten gebaut, den mein Sohn immer wieder einmal in Beschlag nimmt und damit spielt. Irgendwann einmal hat er eine ganz kleine „Mini Arcade Machine“ (die man in Fernost für unter 10 Euros kaufen kann) bekommen. Die bereitet aber aufgrund der sehr kleinen Abmessungen und dem Bildschirm von knapp 5 cm nur kurz Vergnügen. Auch die Qualität der fix eingebauten Spiele ist etwas grenzwertig. Als er wieder einmal mit dem kleinen Teil spielte kam die Frage: „Können wir so etwas aus Papier basteln?“, fragte er. Natürlich konnten wir! Also suchten wir uns eine alte Verpackungsschachtel, die von einer Lieferung eines großen Onlineversenders übrig geblieben war, und begannen, die ersten Entwürfe zu zeichnen.
Schritt 1: Skizzen und Planung Mit einem Lineal, einem Bleistift zeichneten wir die Umrisse des Automaten direkt auf die Kartonage. Wir orientierten uns dabei an den Massen des kleinen Arcade-Automaten: ein leicht nach hinten geneigtes Display, ein breiter Sockel und eine Frontplatte mit Platz für Tasten und Hebel. Die Proportionen wurden einfach hochskaliert… Sohnemann musste abmessen und seine in der Schule erwobenen Multiplikationsfähigkeiten praktisch anwenden …
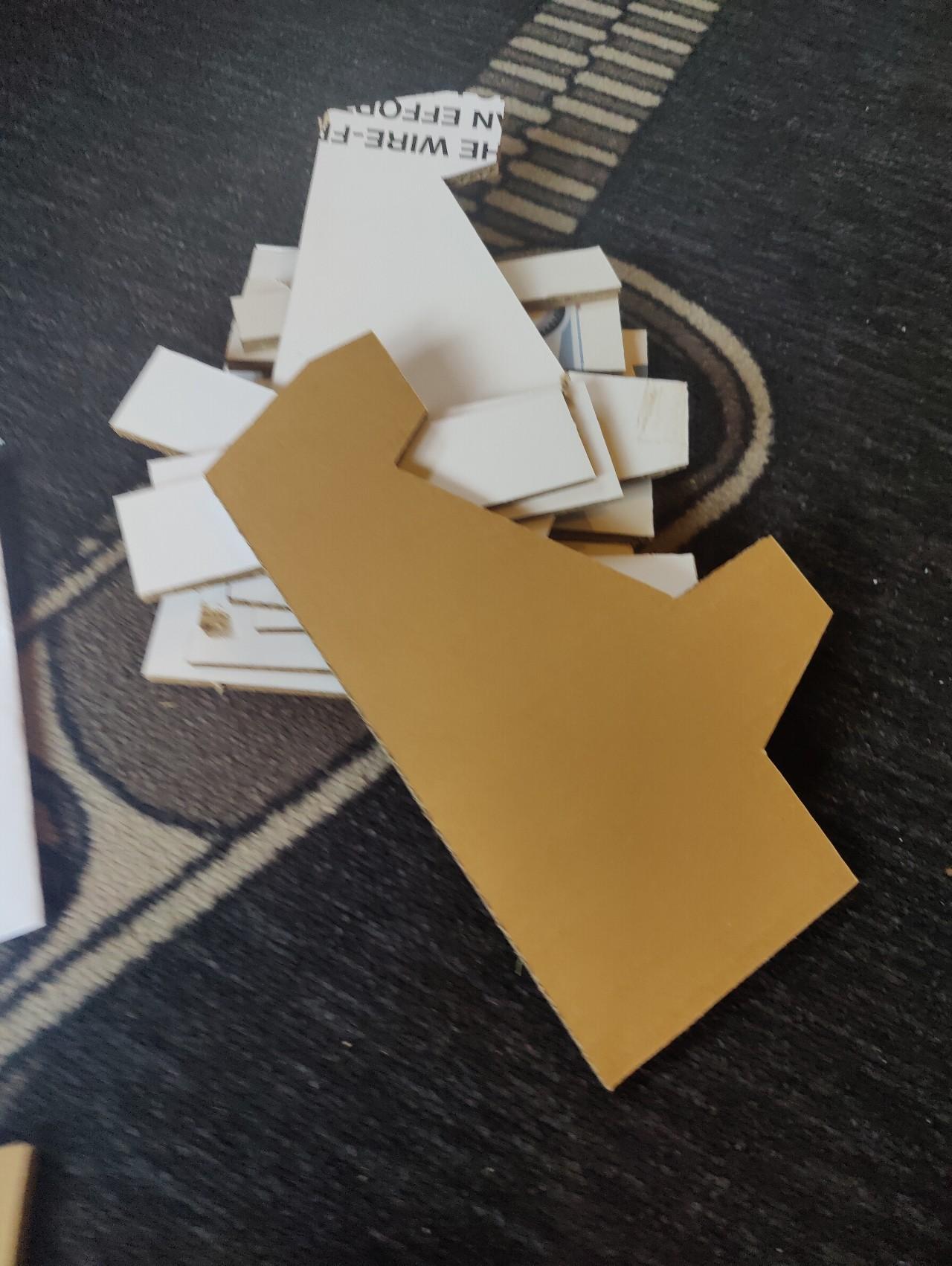
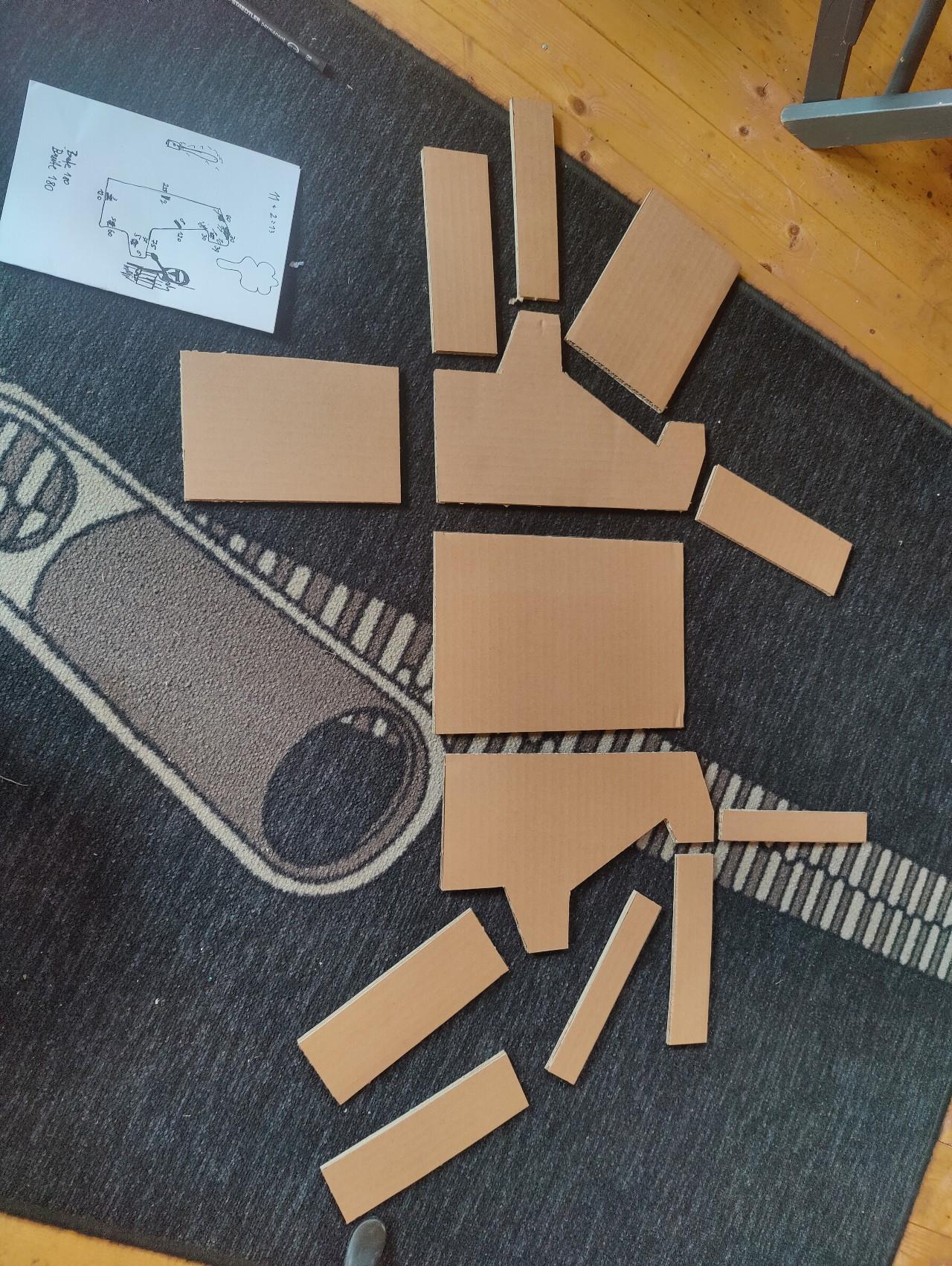
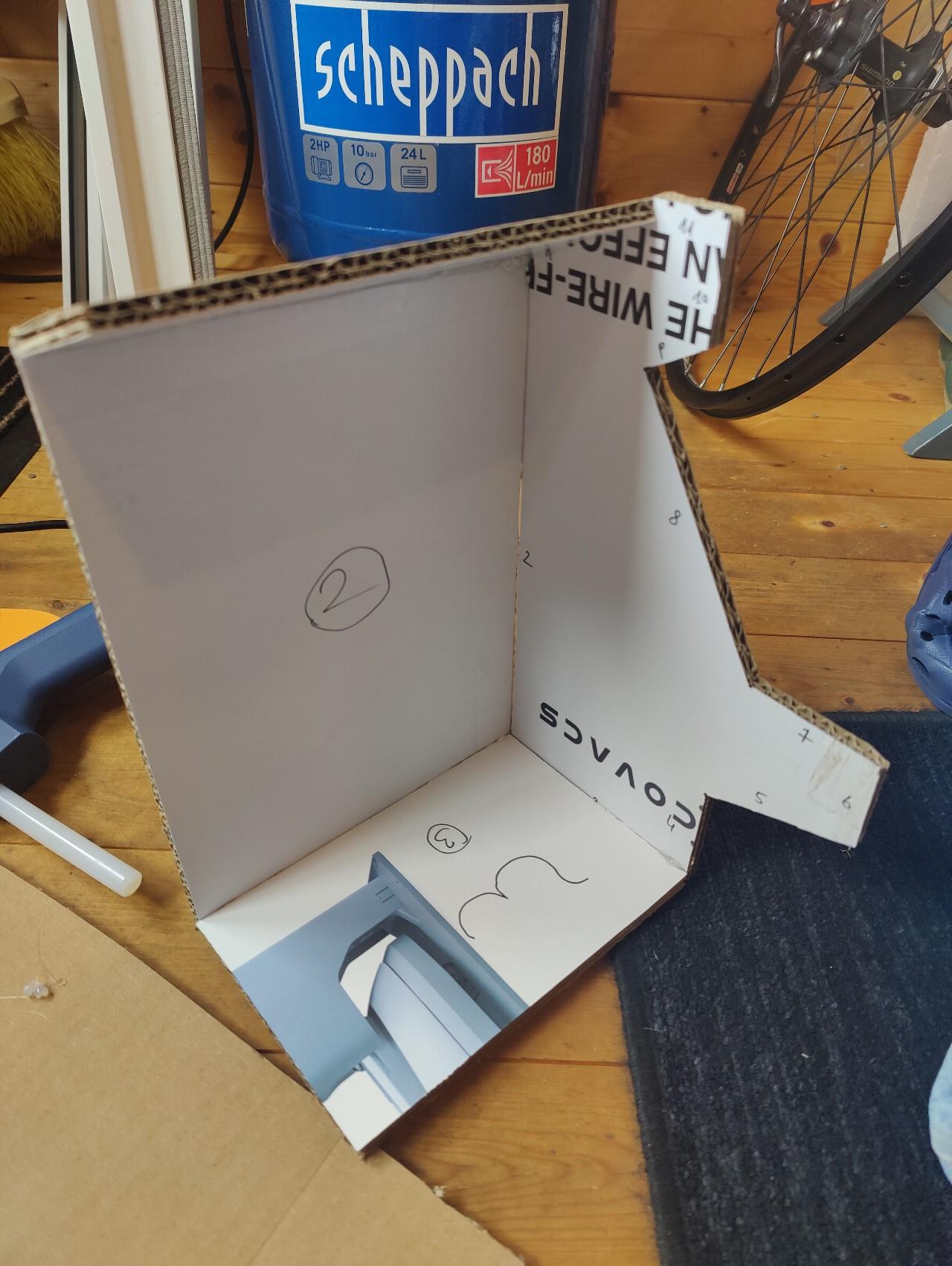
Schritt 2: Ausschneiden und Zusammenkleben Mit einer Schiene und einem Teppichmesser schnitten wir die einzelnen Teile aus. Das war gar nicht so einfach, denn der Karton war dicker, als wir gedacht hatten, und die Kanten sollten möglichst sauber sein. Nachdem alle Teile ausgeschnitten waren, klebten wir sie mit Schmelzkleber zusammen. Der Schmelzkleber war ideal, da er schnell abkühlt und eine stabile Verbindung schafft.
die ausgeschnittenen Kartonteileund so sind sie angeordnetmit Schmelzkleber werden die Teile aneinandergeklebt
Schritt 3: Bemalen und Dekorieren
Der fertige Papierautomat sah schon ganz gut aus, aber er war noch etwas langweilig. Also bemalten er ihn mit seinen Filzstiften en und verpasste ihm ein klassisches Design in Schwarz. Für die Tasten und Hebel bastelten er kleine Knöpfe aus Papier, die er auf die Frontplatte klebte. Das Ergebnis war ein kleiner, aber detailreicher Arcade-Automat aus Papier.
der fertig zusammengeklebte Papier Arcadedas fast fertig bemalte Papiermodell
Die Idee wächst: Vom Papiermodell zum fuktionstüchtigen Automaten Das Papiermodell war ein voller Erfolg, und wir hatten viel Spaß beim Basteln. Doch irgendwann kam mir der Gedanke: Was wäre, wenn wir das Ganze aus Holz bauen und mit echten Tasten, einem Bildschirm und einem kleinen Computer, zum Beispiel einen alten Raspberry PI ausstatten würden? So könnte er einen schönen Arcade Automaten haben und auch tatsächlich darauf spielen. Die schlechteren Tage der Sommerferien boten sich dafür an und so begann die Planung für den Bau eines echten Mini-Arcade-Automaten.
Materialwahl: MDF-Platten und Lasercutter Für den Bau des Automaten entschied ich mich für MDF-Platten mit einer Dicke von 6 mm. MDF ist ein ideales Material für solche Projekte: Es ist stabil, leicht zu bearbeiten und hat eine glatte Oberfläche, die sich gut lackieren lässt. Außerdem ist es relativ günstig, was bei einem Hobbyprojekt natürlich ein großer Vorteil ist.
Schritt 1: Digitalisieren der Skizzen Die Skizzen des Papierautomaten dienten als Vorlage für die Holzkonstruktion. Mit der Software Inkscape zeichnete ich die Entwürfe und passte sie an die Maße der MDF-Platten an. Dabei achtete ich darauf, dass die Proportionen stimmten und die einzelnen Teile später gut zusammenpassen würden. Die endgültigen Maße des Automaten sollten etwa 25 x 30 cm betragen – klein genug, um handlich zu sein, aber groß genug, um ein authentisches Arcade-Gefühl zu vermitteln.
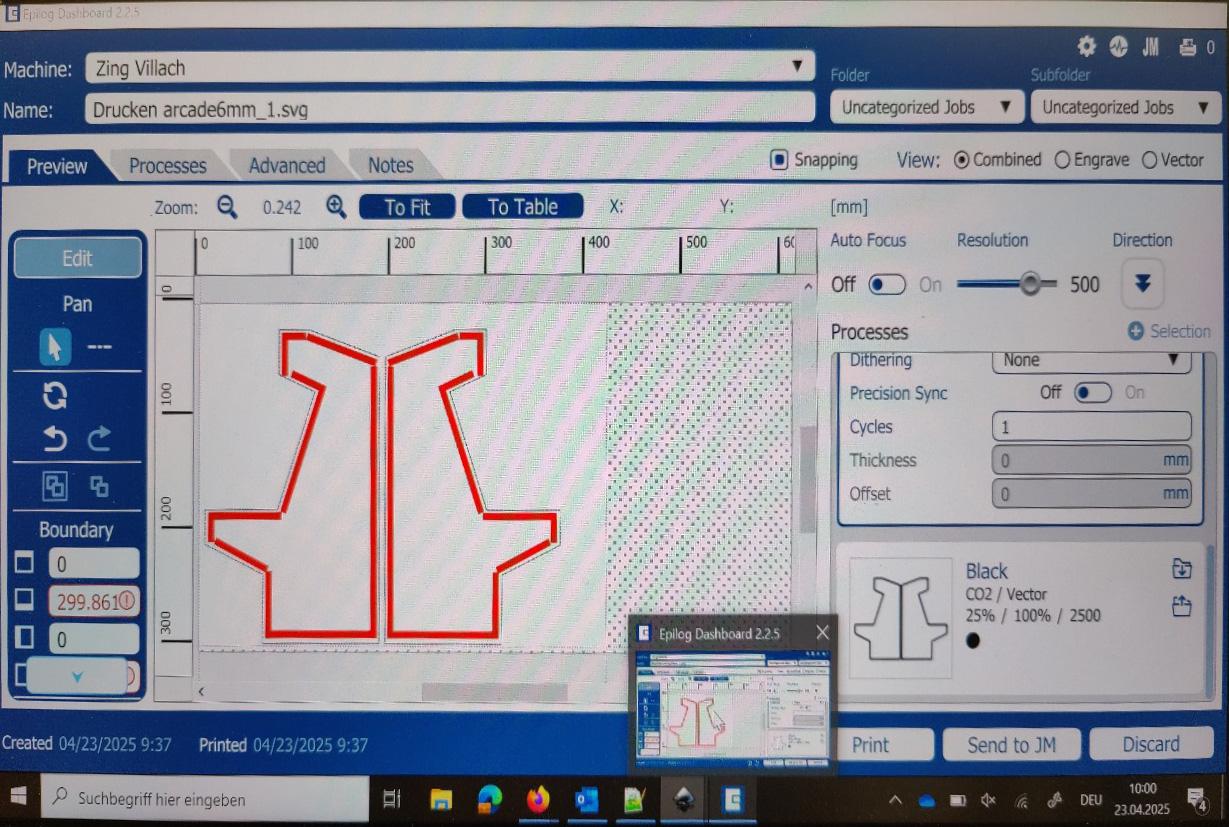
die in den Lasercutter importierten inkscape files
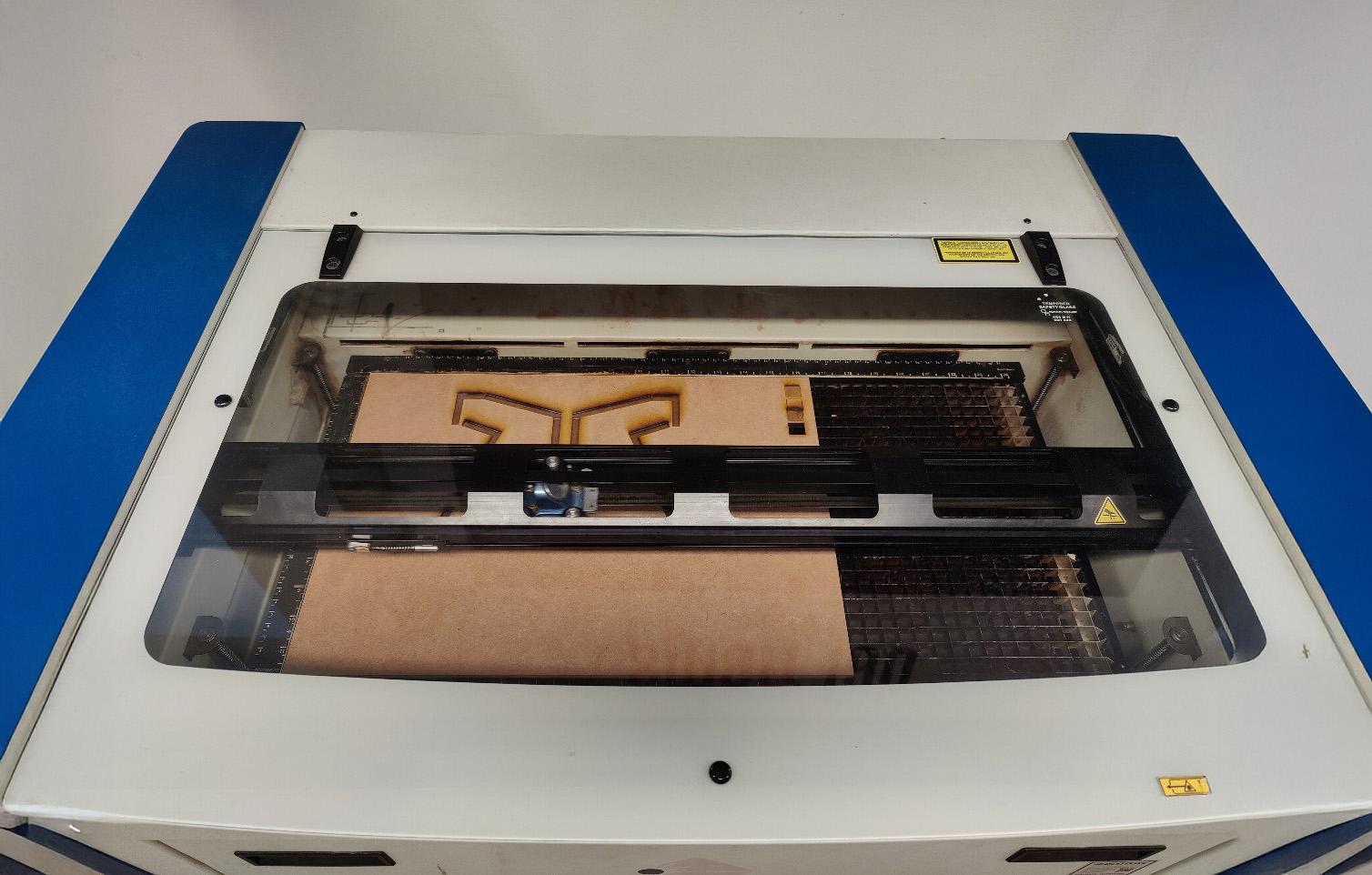
Schritt 2: Zuschnitt mit dem Lasercutter Der nächste Schritt war der Zuschnitt der MDF-Platten. Hier kam ein Lasercutter zum Einsatz, der die Teile mit hoher Präzision ausschneiden konnte. Die Möglichkeit, Nuten in die Platten zu schneiden, war hier besonders praktisch: Diese Nuten ermöglichten es, die Teile später passgenau rechtwinklig zusammenzusetzen und zu verkleben.
der Lasercutter bei der Arbeit
Nachdem alle Teile ausgeschnitten waren, begann der Zusammenbau. Zunächst prüfte ich die Passform der einzelnen Teile. Dank der präzisen Arbeit des Lasercutters passte alles perfekt zusammen. Die Nuten erleichterten den Aufbau enorm, da sie die Platten in der richtigen Position hielten, während der Kleber trocknete.
alles passt zusammenauch das Bedienpanel wird bedienbar sein
Schritt 3: Lackierung Nachdem der „Rohbau“ fertig war, ging es an die Lackierung. Ich entschied mich für einen schwarzen Acryllack, der dem Automaten ein etwas professionelleres Finish verleihen sollte. Die glatte Oberfläche der MDF-Platten war ideal für die Lackierung, und nach zwei Schichten sah der Automat fast aus wie ein echtes Arcade-Gerät in klein.
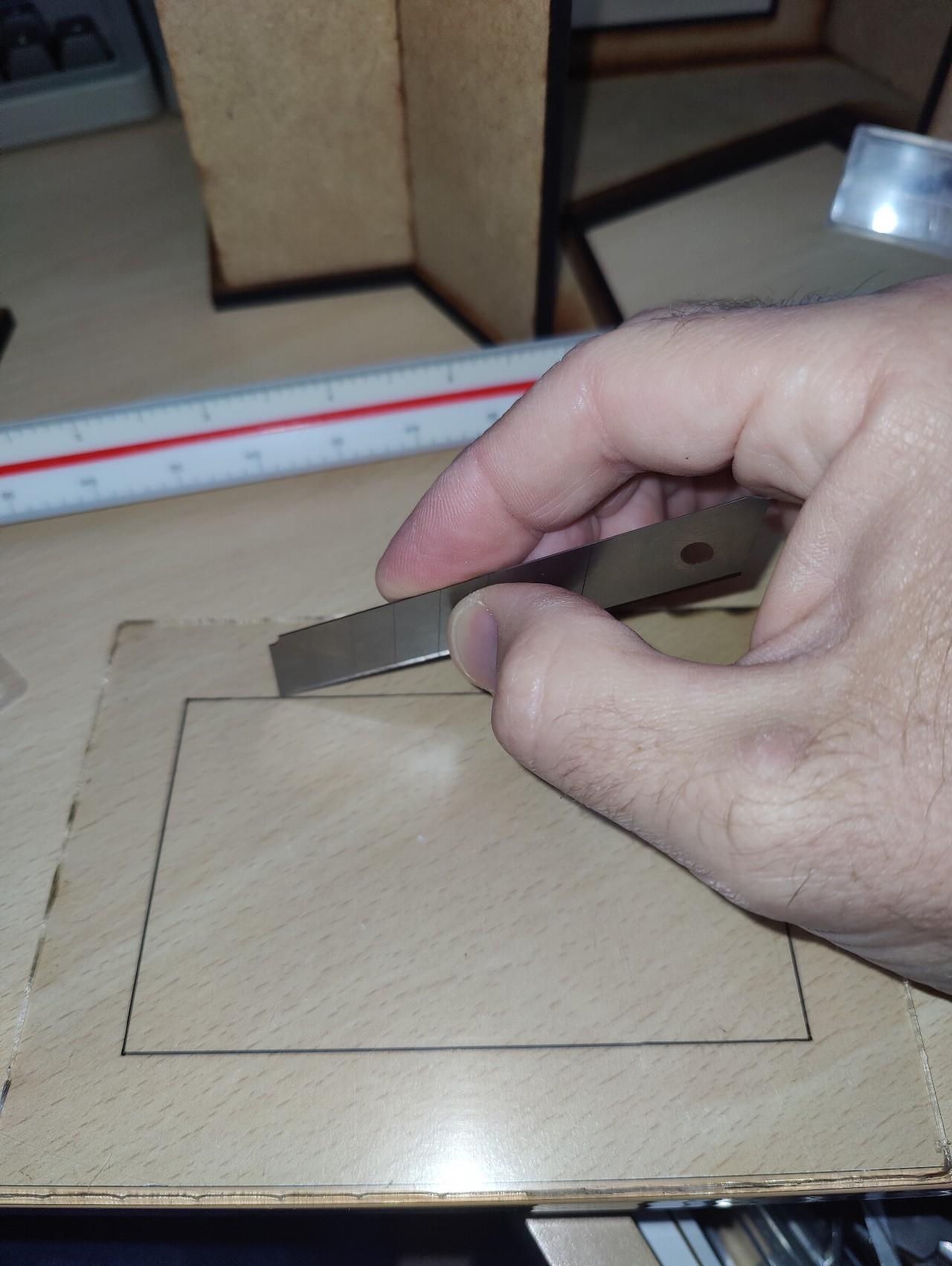
Das Frontglas, das den LCD-Bildschirm schützt, besteht aus Acrylglas. Um den Rand der Schutzabdeckung gleichmäßig schwarz lackieren zu können, wird die Schutzfolie, die sich auf dem Acrylglas befindet, im Randbereich entfernt. Anschließend wird der freigelegte Randbereich des Acrylglases schwarz lackiert, um eine saubere und gleichmäßige Optik zu erzielen.
Ausschneiden der Schutzfolie des Acrylglases um den Rahmen zu maskieren
Das Frontglas, das den LCD-Bildschirm schützt, besteht aus Acrylglas. Um den Rand der Schutzabdeckung gleichmäßig schwarz lackieren zu können, wird die Schutzfolie, die sich auf dem Acrylglas befindet, im Randbereich entfernt. Anschließend wird der freigelegte Randbereich des Acrylglases schwarz lackiert, um eine saubere und gleichmäßige Optik zu erzielen. So nach und nach nahm das Gehäuse Formen an und es war an der Zeit die technischen Komponenten einzubauen.
der Aufbau nimm langsam Formen an
Das Herzstück des Innenlebens ist ein alter Raspberry PI 3 mit einem Retropie – SD Karten Image. Für die Bedienung und Steuerung entschied ich mich für farbige Drucktaster mit 16mm Durchmesser. Davon finden zehn Stück auf dem Bedienpanel Platz. Auf der linke und der rechten Seite ist je ein Taster platziert. Aus Bequemlichkeit und auch aus Kostengründen bastelte ich keinen eigenen Controller für die Tastenbedienung des Raspberry, sondern nahm einen fertigen USB-HID Controller, der nur ein paar Euro teuer war. Der Bildschirm ist ein 5 Zoll 800×600 Pixel LC-Display und um die PCM Soundausgabe des Raspberry auf einem kleinen Lautsprecher hörbar zu machen, kam ein fertiges „superlowcost“ Class D Verstärkerboard zum Einsatz.
die Innenkanten des Monitorrahmens müssen geschwärzt werden, damit es später keine Reflexionen in der Acrylscheibe gibt
Nachdem nun alle Gehäuseteile fertig lackiert waren und auch alle Komponenten für den Innenausbau vorbereitet waren, begann schlussendlich der Zusammenbau. Da alle Gehäuseteile verklebt sind, aber die Technik natürlich zugänglich bleiben soll, haben wir auf der Rückseite eine Revisionstüre eingeplant…
Tastenfeld mit Farbbestückung nach Juniors Wunschder HID Tasencontroller findet seinen Platzder Bildschirm mit dem Raspberry PI wird eingesetzthier sind alle Kompnenten fertig eingebaut
Jetzt fehlt nur mehr der Revisionsdeckel auf der Rückseite. Um die Abwärme des Raspberry Pi loszuwerden haben wir ein paar Lüftungsschlitze in den Deckel geschnitten. (genauer gesagt der Laser hat geschnitten 🙂 )
Deckel an der Rückseite
Zur Stromversorgung dient ein 5V / 20W Netzteil, das an einer hinten angebrachten Netzteilbuchse angesteckt wird. Es versorgt sämtliche Baugruppen (Raspberry, Audioverstärker und Monitor).
Die verbaute Technik hier nochmal in der Übersicht:
Raspberry Pi 3 mit 32GB SD Karte
5-Zoll-LCD-Bildschirm: Waveshare 5inch 800×480
HID-Controller: USB noname Joystickcontroller (Onlineversand)
Tasten: 16 mm Momentary Push Button (30Stk Set im Onlineversand)
Audioverstärker: DollaTek 3W DC 5V PAM8403 (Onlineversand)
Stromversorgung: 5V/20W-Netzteil
vom Papiermodell zum bespielbaren MiniArcade
Da mir für´s Ende des Blogbeitrags kein vernünftiger Text einfällt, hat die KI für mich nachgedacht und den folgenden Absatz erzeugt:
Nach Wochen harter Arbeit war es endlich soweit: Der Mini-Arcade-Automat war fertig. Mit seinem schwarzen Gehäuse, den farbigen Tasten und dem kleinen Bildschirm sieht er nicht nur aus wie ein echter Arcade-Automat, sondern spielt sich auch so. Mein Sohn war begeistert – und ich auch. Es ist ein Projekt, das uns nicht nur viel Spaß gemacht hat, sondern auch zeigt, wie aus einer einfachen Idee etwas Großartiges entstehen kann.
Fazit: Manchmal braucht es nicht viel, um etwas Besonderes zu schaffen: ein bisschen Karton, ein paar MDF-Platten und eine große Portion Begeisterung. Unser Mini-Arcade-Automat ist der beste Beweis dafür, dass Basteln nicht nur kreativ, sondern auch unglaublich erfüllend sein kann. Wer weiß, vielleicht ist das ja der Anfang einer ganzen Serie von Mini-Projekten? 😊
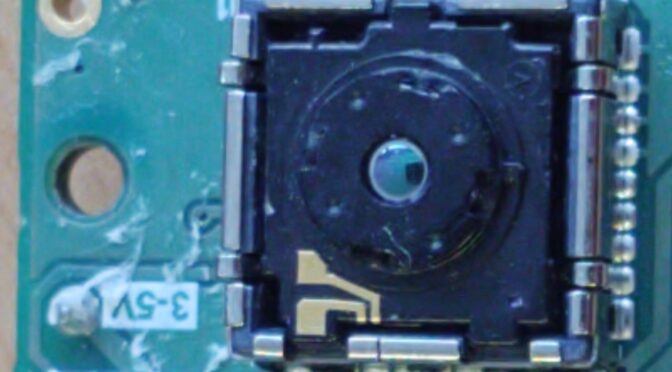
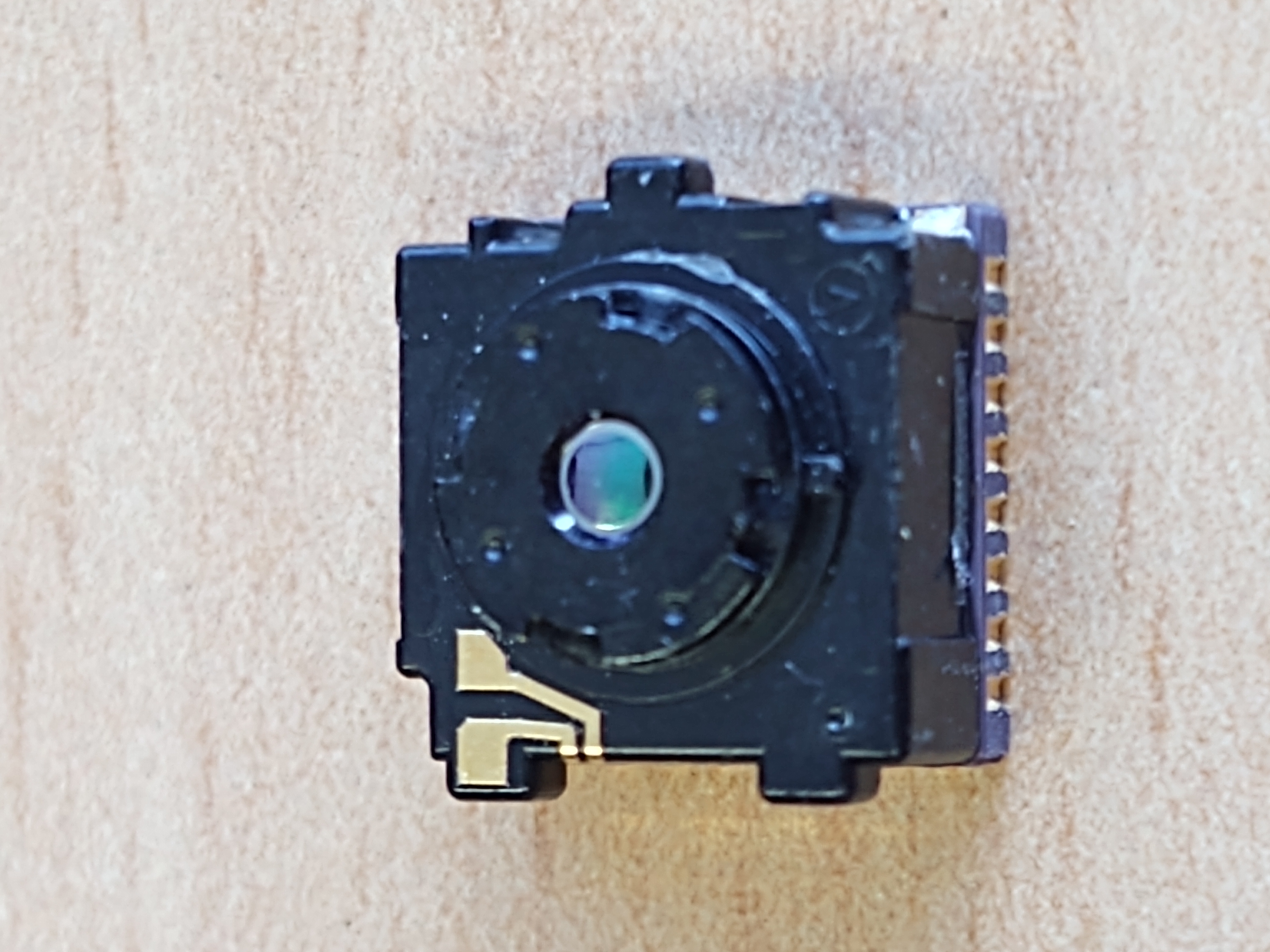
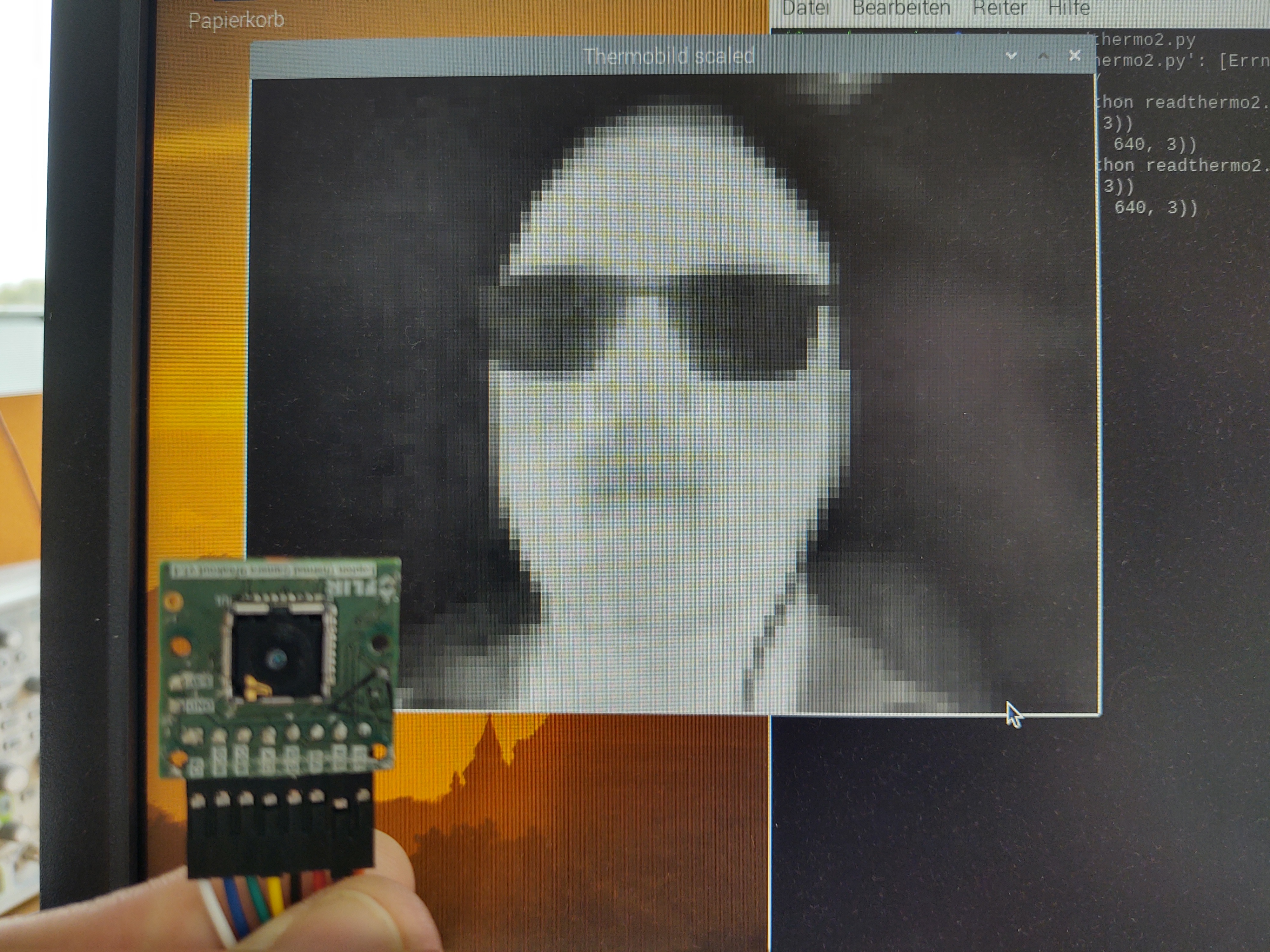
Ein vielleicht interessantes kleines Projekt ist, ein Lepton Kameramodul mit einem Raspberry zu betreiben. In meinem Fall verwende ich ein Lepton Modul mit 80×60 Pixeln bei einer Pixelgröße von 17µm und einer spektralen Empfindlichkeit im langwelligen Infrarot Bereich von 8µm bis 14µm. Die Framerate beträgt maximal 8,6 Hz. Das Kameramodul wird in ein Breakout-Board gesteckt und dieses mit dem Raspberry PI verbunden. Die Infos dazu gibt‘s weiter unten. Es gibt auch im Entwicklerbereich der Website flir.lepton.com eine Anleitung wie das Breakoutboard mit dem Raspi betrieben wird.
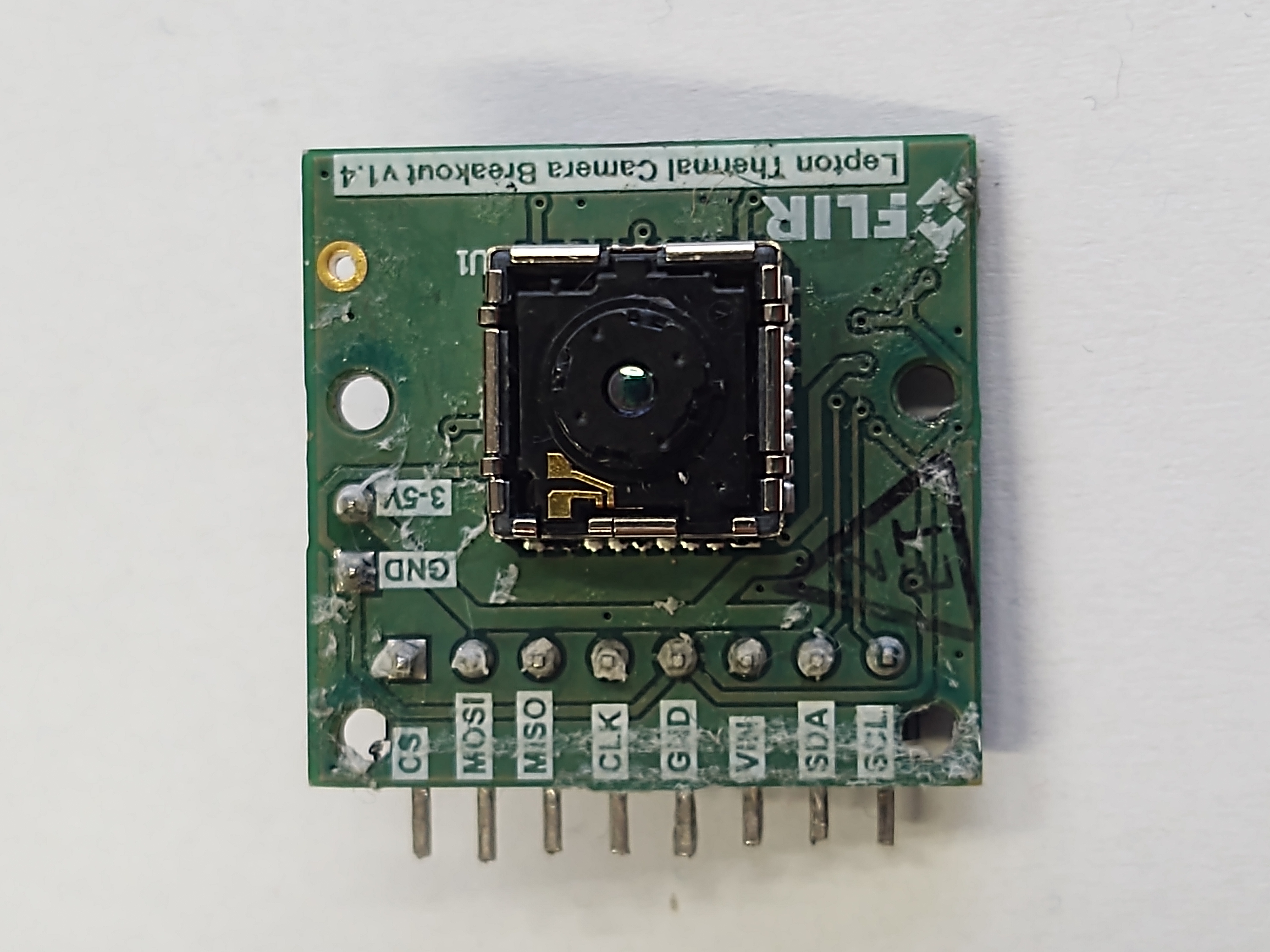
Camera Module mit Breakout Board V1.4
Benötigt wird ein Raspberry PI (in diesem Beispiel habe ich einen Raspberry PI4 verwendet), ein Lepton Thermal Kamera Breakout Board V1.4 und ein wenig Drahtwerk für die Verbindungsleitungen. Die genaue Teileliste (um auch alles Aufbauen und in Betrieb nehmen zu können) ist unten angeführt:
Raspberry PI (Modell 2,3 oder 4)
Micro SD-Karte (ab 8GB)
USB-Steckernetzteil mit Micro USB (oder USB-C) Kabel (je nach Raspberry PI Modell)
LAN-Kabel und Zugang zu einem Switch oder Router mit bestehender Internetverbindung
Idealerweise einen Rechner mit (SD-Karten-Slot) um das Image für den Raspberry vorzubereiten
Ein Monitor für den Raspberry PI mit HDMI oder MINI-HDMI-Kabel
USB-Tastatur, Maus
Lepton Thermal Kamera Breakout Board
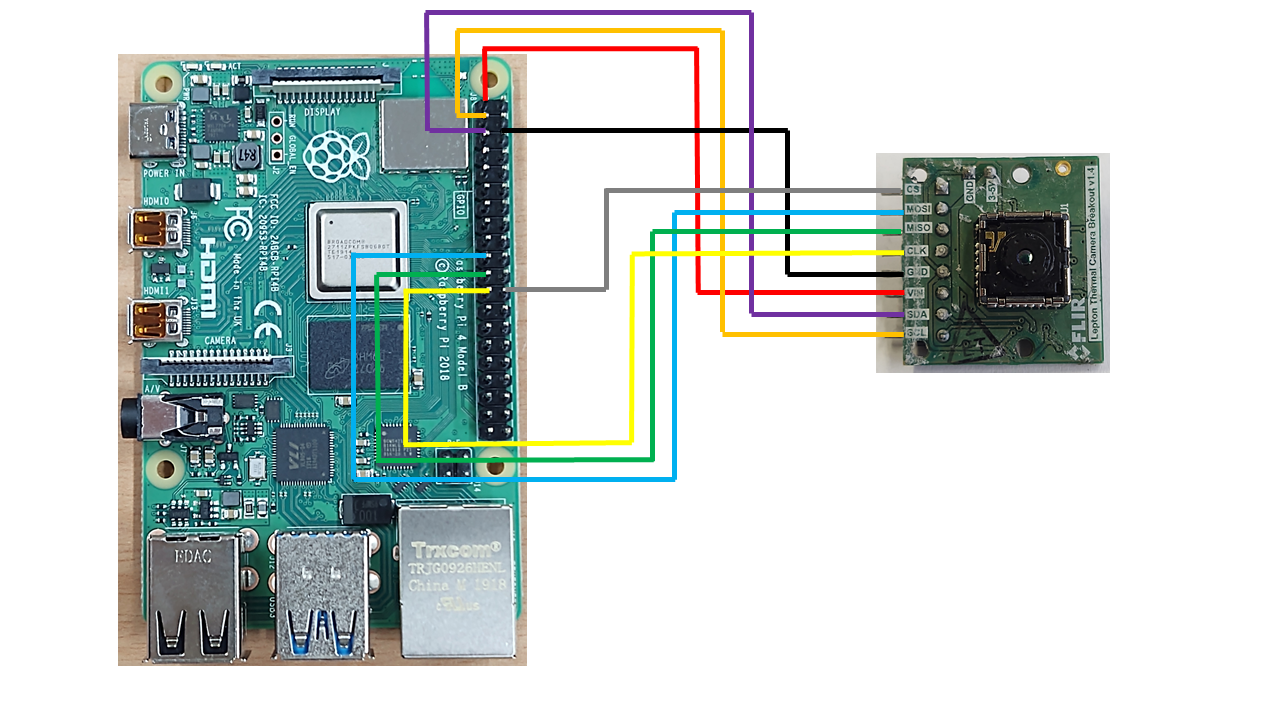
Ist alles vorhanden, dann ist die Verdrahtung des Kamera Moduls mit dem PI herzustellen. Am einfachsten verwendet man die Jumper-Kabel (Female-Female) die in der Modulbastelwelt sehr beliebt sind. Ein Lötkolben ist für viele Demo- und Testaufbauten nicht mehr notwendig… Die folgende Skizze zeigt die herzustellende Verdrahtung:
Klicken zum Vergrössern
Das Pinning ist hier nochmals angeführt:
Raspi GPIO PIN01 (3V3) –> Lepton Pin VIN
Raspi GPIO PIN03 (SDA) –> Lepton Pin SDA
Raspi GPIO PIN05 (SCL) –> Lepton Pin SCL
Raspi GPIO PIN06 (GND) –> Lepton Pin GND
Raspi GPIO PIN19(MOSI) –> Lepton Pin MOSI
Raspi GPIO PIN21(MISO) –> Lepton Pin MISO
Raspi GPIO PIN23(CLK) –> Lepton Pin CLK
Raspi GPIO PIN24(CEO) –> Lepton Pin CS
Als Betriebssystem für den Raspberry Pi habe ich Raspbian installiert. Das geht entweder über den Download des RASPBIAN Images von der Webseite https://www.raspberrypi.org/downloads/raspbian oder auch über den NOOBS Installer. Mit dem Tool „etcher“ oder „win32diskimager“ kann die Image Datei auf die SD-Karte geschrieben werden. Wer mit NOOBS arbeitet braucht nur die zip-Datei auf die FAT32 formatierte SD-Karte zu entpacken. Ist das erledigt, dann einfach die SD-Karte in den Raspberry stecken, Monitor, Keyboard und Maus an den PI anstecken und zum Schluss die Stromversorgung aktivieren. Wenn NOOBS auf der Karte ist, dann wird nach dem Start eine Auswahl an zu installierenden Betriebssystemen angezeigt. Hier am besten auch RASPIAN auswählen und die Installation starten. Ist das abgeschlossen, dann ist je nach gewähltem Image entweder nur eine Konsole oder eben ein Desktop zu sehen. Im letzten Fall ist dann ein Terminal zu öffnen, damit in der Konsole weitergearbeitet werden kann.
Mit sudo raspi-config ist nach dem login in die Konsole das Raspberry PI Config – Tool zu öffnen. Darin sind folgende Services zu aktivieren:
SPI (unter Advanced Options)
SSH (unter Advanced Options)
I2C (unter Advanced Options)
Enable Camera (im Hauptmenu des raspi-config tools)
Danach ist der Raspberry zu rebooten. Nach dem erneuten Start und login (als User pi mit default Passwort raspberry) muss das Paket openCV installiert werden. Mit sudo apt-get install python-opencv ist das erledigt.
Auf GitHub habe ich eine Python Library von brandoncurtis und kekiefer für das Lepton Board gefunden. Die Library nennt sich pylepton und ist auf https://github.com/groupgets/pylepton zu finden.
Mit git clone https://github.com/kekiefer/pylepton.git legen wir das Repository an und wechseln danach in das Verzeichnis cd pylepton. Jetzt kann das Setup Skript ausgeführt werden: sudo python setup.py install.
Mit dem folgenden kleinen Codebeispiel wird die Lepton Kamera ausgelesen, das 80×60 Pixel große Bild auf 800% skaliert und angezeigt.
import numpy as np
import cv2
from pylepton import Lepton
with Lepton() as lepi:
a,_ = lepi.capture()
cv2.normalize(a, a, 0, 65535, cv2.NORM_MINMAX) # extend contrast
np.right_shift(a, 8, a) #daten in 8bit anpassen
cv2.imwrite("thermobild.jpg", np.uint8(a)) #bild schreiben
img=cv2.imread('thermobild.jpg')
cv2.imshow('Thermobild', img)
print('Originalabmessungen: ',img.shape)
scale_percent = 800
width = int(img.shape[1] * scale_percent / 100)
height = int(img.shape[0] * scale_percent / 100)
dim = (width, height)
resized = cv2.resize(img, dim, interpolation = cv2.INTER_AREA)
print('Achtfach vergroessert: ',resized.shape)
cv2.imshow("Thermobild 8x", resized)
cv2.waitKey(0)
cv2.destroyAllWindows()
exit()
Der Raspberry PI wird mittlerweile ja in vielen Anwendungen im Dauerbetrieb eingesetzt und hat dort unterschiedlichste Aufgaben zu erfüllen. Manchmal ist er ein Webserver, eine Wettersensorstation, ein NAS, oder eine Steuerung. Was auch immer. Doch meist hat ein Raspberry Board nur eine dieser Aufgaben zu erfüllen. Die Betriebssysteme bieten jedoch wesentlich mehr Funktionen und Features an, die nicht unbedingt für alle Anwendungen benötigt werden, aber trotzdem mitlaufen und Prozesszeit benötigen, oder die SD-Karte mit unnötigen Schreibzyklen belasten. Das lässt sich aber ändern.
Mein Kollege Mario Wehr hat eine Sammlung an Optimierungen zusammengestellt, die ich hier mit seiner Genehmigung veröffentlichen darf.
Xserver/Windomanager disablen cmd: raspi-config Menp -> Boot Optins -> Desltop/CLI -> Console only with Login
GPU Shared MEM auf 16MB cmd: raspi-config Menü -> Advanced Config -> Memory Split ->16MB
In diesem Projekt stelle ich eine Anwendung des Raspberry PI im Bereich Bilderfassung vor. Es gibt zu diesem Thema etliche Foren und Beiträge im Internet, doch eine direkt geeignete Lösung war nicht zu finden. Darum poste ich hier meine Lösung.
Als Aufgabenstellung soll eine Platinen Bohrmaschine der Firma Lemmen von der optischen Version (Bohrlochzentrierung per Lupe) in eine opto-elektronische Version (Bohrlochzentrierung auf Bildschirm Monitor) kostengünstig umgebaut werden.
Lemmon „Variodrill“ Bild: Herstellerwebsite
Die Bohrmaschine soll dahingehend modifiziert werden, dass die zur Sichtkontrolle verwendete Lupe mit sechsfacher Vergrößerung durch eine Kamera ersetzt wird. Das Kamerabild soll auf einem LCD Computermonitor dargestellt werden. Eine geeignete Kamera war schnell gefunden. Hier gibt es günstige Mikroskop Kameras, die eine variable Vergrößerung bis 200fach erreichen. Eine solche Kamera ist beispielsweise die DigiMicro Scale von „dnt“. Allerdings ist das eine USB-Kamera, die einen PC und eine geeignete Software benötigt, um ein Bild anzuzeigen. Und ein PC ist wiederum nicht unbedingt eine kostengünstige Lösung. Weiters käme auch eine CVBS Kamera (also eine analoge Videokamera) in Frage, die einfach an einen geeigneten Bildschirm (oder PC-Monitor mit Upscaler/Converter) geschaltet werden müsste. Aber das ist nicht zeitgemäß …
Weiters soll das Bild ja nicht nur das Bohrloch vergrößern, sondern auch noch die Vorzüge eines Zielvisieres, also eines Fadenkreuzes oder Kreisabsehens implementieren. Dafür bräuchte man im analogen Bereich wieder einen OSD- (OnScreenDisplay) Generator oder zumindest einen Edding, der das Kreuz gemalt auf dem Bildschirm darstellt 🙂
USB Mikroskop Kamera
Also die Varianten PC oder analoges Kamerasystem fallen durch. Aber es gibt ja noch den Raspberry PI, den kleinen Einplatinencomputer mit einem integrierten USB-Host und wunderbaren Grafikfähigkeiten. Das Projekt wird also mit einem Raspberry PI 3 realisiert.
Als Betriebssystem kommt das Raspbian-Jessi zur Anwendung. Das Image kann hier heruntergeladen werden. Nach dem Entpacken der ZIP Datei und dem Beschreiben der MicroSD Karte mit dem Win32DiskImager, kann der Raspberry gebootet werden. Jetzt gibt es zwei Möglichkeiten an den Raspberry eine Kamera anzuschließen:
-mittels Flachbandkabel an den Kamera Port (hier kann nur die PI-Kamera angeschlossen werden)
-oder über den USB-Port jede USB2.0 Kamera.
Voraussetzung hierbei ist, dass die Cam auch erkannt wird. Hier kann mit >lsusb in der Linux Konsole nachgesehen werden, ob die angeschlossene Cam auch in der Devicelist erscheint. Als einfaches Tool, um am Desktop das Kamerabild zu sehen, kann guvcview verwendet werden. Das würde jetzt auch schon genügen, wenn man nur das Bild sehen will. Unser Ziel ist jedoch, in das Kamerabild ein Overlay mit Fadenkreuz einzublenden.
Das lässt sich in Python mit der PI-Kamera und der der picamera Library wunderbar lösen. Die Library besitzt eine integrierte Overlayfunktion. Es geht aber auch mit der USB-Kamera. Hierfür müssen ein paar Module installiert werden. In der Linux Konsole sind folgende Zeilen einzugeben:
zuerst einmal die üblichen Aktualisierungen:
sudo apt-get update>sudo apt-get upgrade
dann installieren wir numpy
sudo apt-get install python-numpy
und danach das Bildverarbeitungstool schlechthin: OpenCV
sudo apt-get install python-opencv
Die Python-Version die ich hier verwende ist 2.7.9
Jetzt kann ein Python Skript erstellt werden, das die USB-Kamera initialisiert, und in einer Endlosschleife die Bilder an ein Desktopfenster übergibt. Mit den Bildbearbeitungsfunktionen in opencv lässt sich auch das Erstellen eines Fadenkreuzes realisieren. Auch das Fixieren des Ausgabefensters am Desktopbildschirm ist möglich. Siehe folgendes Skript:
#usb camera mit osd für platinenbohrsystem
#version 1.0 03/2017 by bihlo
import numpy as np
import cv2
cam = cv2.VideoCapture(0)
cam.open(0)
cam.set(3,800)
cam.set(4,600)
while(True):
# bei jedem schleifendurchlauf wird ein frame genereriert
# frame von der camera holen
ret, frame = cam.read()
# fadenkreuz mit der funktion line zeichnen mit 2 pixeln linienbreite
cv2.line(frame,(0,300),(800,300),(255,0,0),2)
cv2.line(frame,(400,0),(400,600),(255,0,0),2)
# zwei kreise zeichnen
cv2.circle(frame,(400,300), 50, (255,0,0), 2)
cv2.circle(frame,(400,300), 100, (255,0,0), 2)
#text ins bild einblenden
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(frame,'Platinenbohrsystem V1.0',(10,50), font, 1,(255,255,255),2)
# ausgabe des frames in fenster/ beenden mit taste "q"
cv2.nameWindow('Platinenbohranlage CAM')
cv2.moveWindow('Platinenbohranlage CAM',0,0)
cv2.imshow('Platinenbohranlage CAM',frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# nach beendigung das device freigeben und das fenster schlissen
cap.release()
cv2.destroyAllWindows()
Nach Starten des Scripts sollte am Bildschirm das Kamerabild und das Fadenkreuz zu sehen sein:
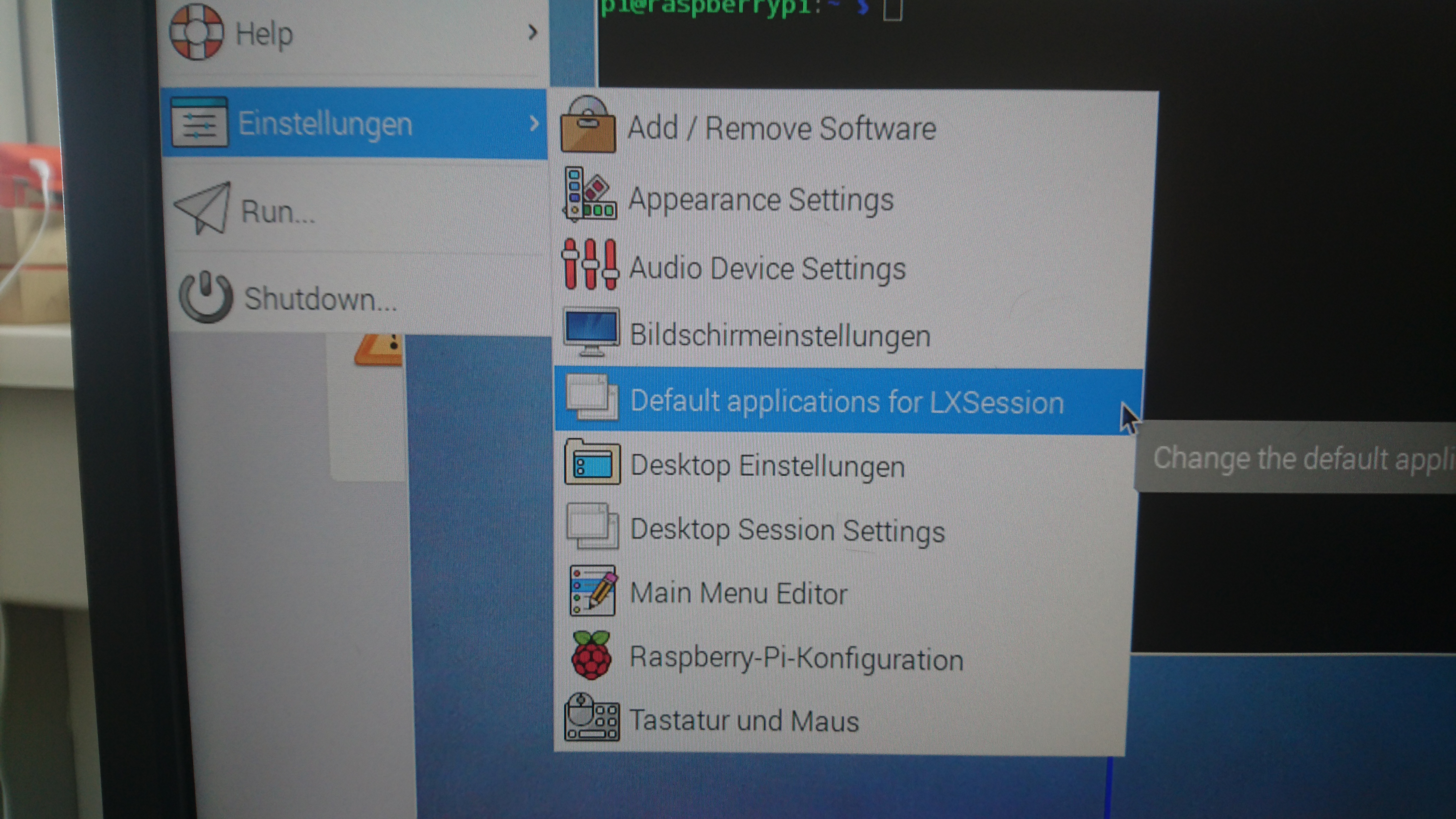
Will man, dass das Python Skript (in meinem Fall habe ich es „camtest9.py“ genannt) nach dem Hochfahren und Laden des Desktops automatisch gestartet wird, so kann man am einfachsten im LXSession Konfigurationsfenster einen Eintrag hinzufügen. Dazu ist im Desktopmenu unter >Einstellungen >Default applications for LXSession anzuklicken.
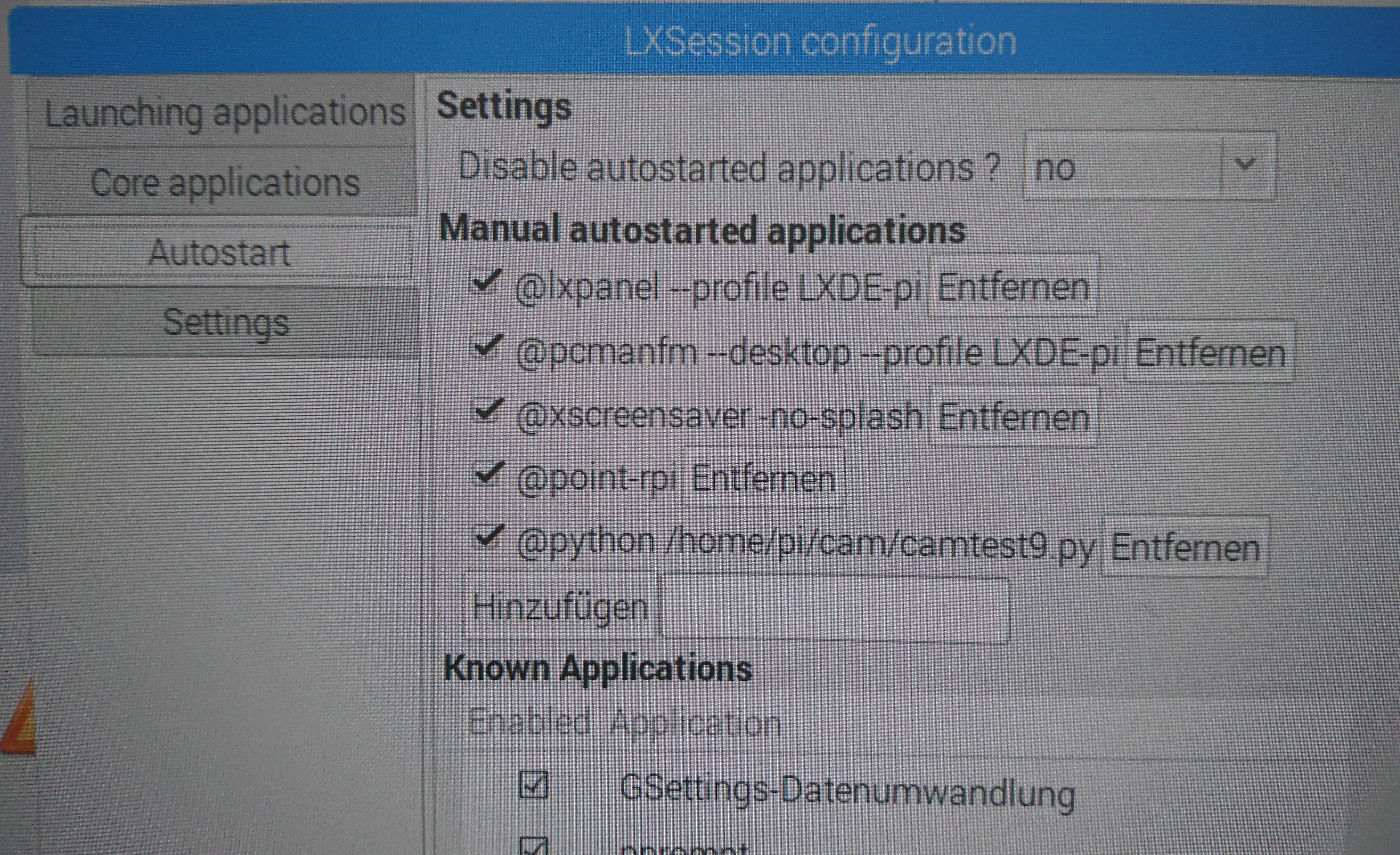
Im LXSession Menü ist dann unter „Autostart“ der folgende Eintrag hinzuzufügen:
@python /(Pfad zum Python Skript)/camtest9.py
Jetzt muss nur mehr neu gestartet werden und das Skript sollte nach dem Start direkt ausgeführt werden. Die folgenden Bilder zeigen den umgebauten Variodrill…
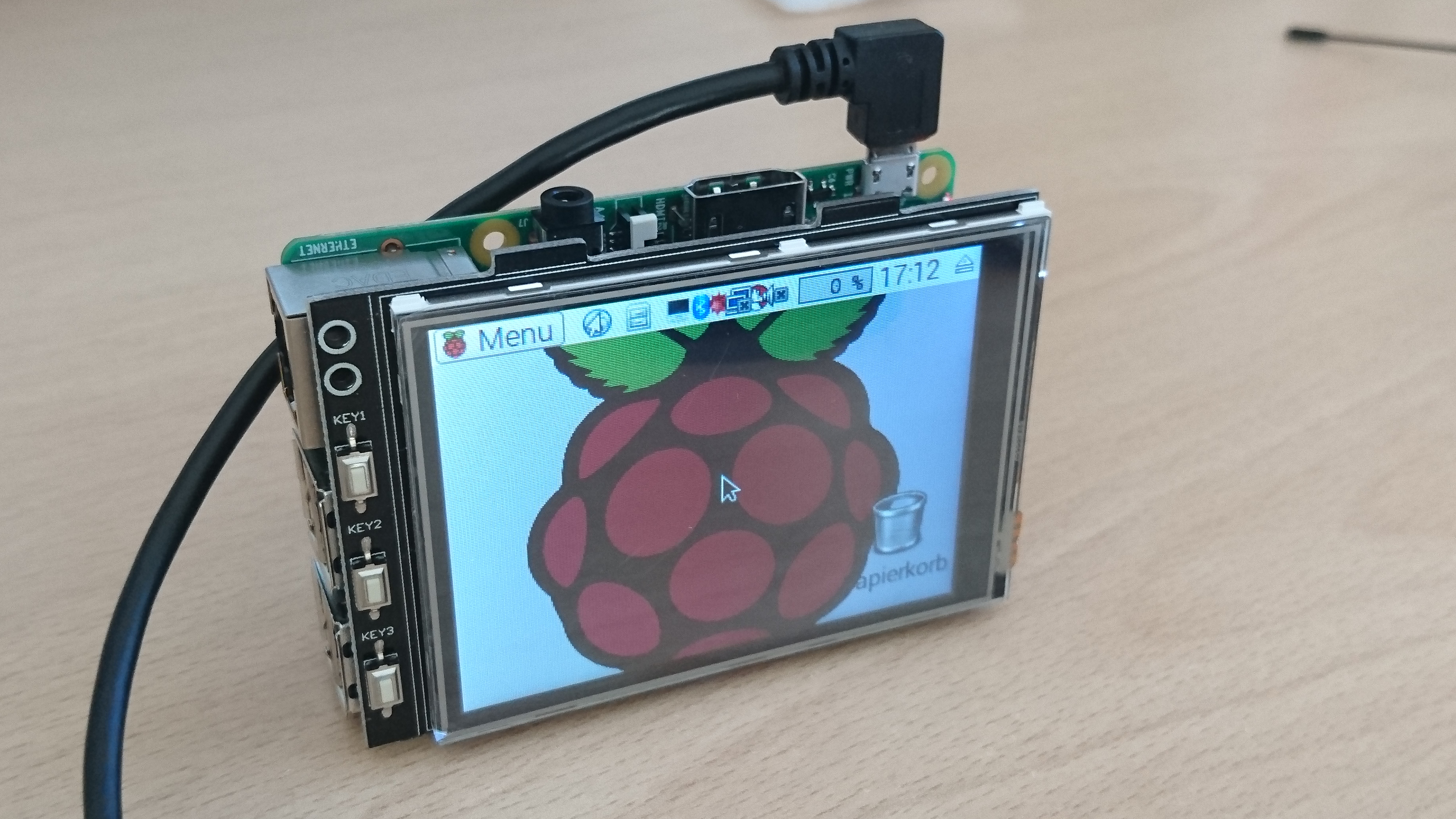
Der Raspberry Pi in seiner Anwendungsvielfalt wurde bisher immer als kleiner Server, oder Datenlogger, oder auch als TV-Frontend betrieben. Dabei wurde er über seinen HDMI-Ausgang an einen TV oder Monitor angeschlossen. Im Server- bzw. im Datalogger Betrieb war kein externer Monitor notwendig. Sämtliche Einstellungen sind über die Konsole über das Netzwerk durchführbar. Will man den Raspberry aber einmal als – beispielsweise – mobiles, Akku betriebenes Gerät aufbauen, so gibt es eine Vielzahl an Anzeigenelementen und Displays. Von einfachen LC-Displays, die mehrzeilig Zeichen darstellen können, über monochrome Dot-Displays bis hin zu TFT-Farbdisplays in unterschiedlichen Größen ist hier alles erhältlich.
Ich stelle hier das 3,2 Zoll TFT 65k Farbdisplay von „joy-it.net“ vor. Das Display ist mit einem Touchscreen ausgestattet und wird über eine 26-polige Buchsen Leiste direkt auf die GPIO-Pinheader Leiste des Raspberry gesteckt. Weitere Verbindungen sind nicht notwendig. Das Display hat dieselben Abmessungen wie das Raspberry Pi Board und bildet so ein kompaktes, handliches PI-Paket…
Ist das Display aufgesteckt, und auf der SD-Karte ein Raspbian-Image mit graphischer Oberfläche installiert, dann kann es losgehen. Zur Einrichtung des Displays sind noch ein paar Schritte durchzuführen. Nach dem Einschalten wird erst einmal nur die Hintergrundbeleuchtung des Displays hell. Mehr passiert vorerst nicht. Darum verbindet man den Raspberry vorher noch einmal mit einem Monitor über HDMI oder über das Netzwerk mit einem Terminal. Hat man nun Zugriff so wird folgende Datei bearbeitet:
sudo nano /boot/config.txt
Hier sind die folgenden Zeilen am Ende einzufügen:
dtparam=spi=on dtoverlay=waveshare32b:rotate=270
Dann die Datei speichern und den Editor wieder schließen. Jetzt die cmdline.txt bearbeiten: sudo nano /boot/cmdline.txt
An das Ende der Zeile ist folgendes anzufügen:
fbcon=map:10
Und die Datei wieder speichern. Jetzt wird eine neue Datei erstellt: sudo nano /usr/share/X11/xorg.conf.d/99-calibration.conf
Hier die folgenden Zeilen eintippen und die Datei wieder speichern:
Hier ist in der Zeile: Option „fbdev“ „/dev/fb0“ das fb0 in fb1 zu ändern. Das soll dann so aussehen: Option „fbdev“ „/dev/fb1“ Und wieder speichern.
Jetzt in den tmp Ordner wechseln (cd /tmp) und folgende Datei herunterladen: wget http://www.joy-it.net/anleitungen/rpi/tft32b/waveshare32b-overlay.dtb und nach
sudo cp waveshare32b-overlay.dtb /boot/overlays/waveshare32b.dtbo kopieren.
Das war´s dann schon. Mit sudo reboot und angestecktem Display dann neu starten.
Wenn alles geklappt hat, so sollte das Display jetzt arbeiten und der Touchscreen funktionieren.
Heute stelle ich kurz ein Miniprojekt, das aus gegebenem Anlass entstanden ist, vor. Zum Thema 3D-Druck mit dem Ultimaker 2 Drucker gibt es ja mittlerweile schon tonnenweise Informationen im Web. Auch die Steuerung über einen Webserver (octoprint) samt Webkamera Überwachung ist sehr gut dokumentiert und einfach zu realisieren. So haben es viele selbsternannte 3D-Drucker-Experten einfach, und können auf das umfangreiche Wissen aus dem Web zurückgreifen. An meinem Arbeitsplatz im Labor ist seit kurzem auch ein Ultimaker 2+ Drucker im Einsatz und wird, da ja viele Druckaufträge oft mehrere Stunden bis zur Vollendung benötigen, per Webcam überwacht. Jetzt könnte man den Drucker unbeaufsichtigt drucken lassen und den Raum oder das Gebäude verlassen und den Fortschritt remote überwachen. Doch wenn jetzt etwas nicht nach Plan verläuft und der Druckkopf beispielsweise mit dem Druckobjekt kollidiert oder das Druckobjekt selbst nicht so gedruckt wird, wie es der Slicer vorsieht, dann kann der Drucker nicht per Remote not-abgeschaltet werden.
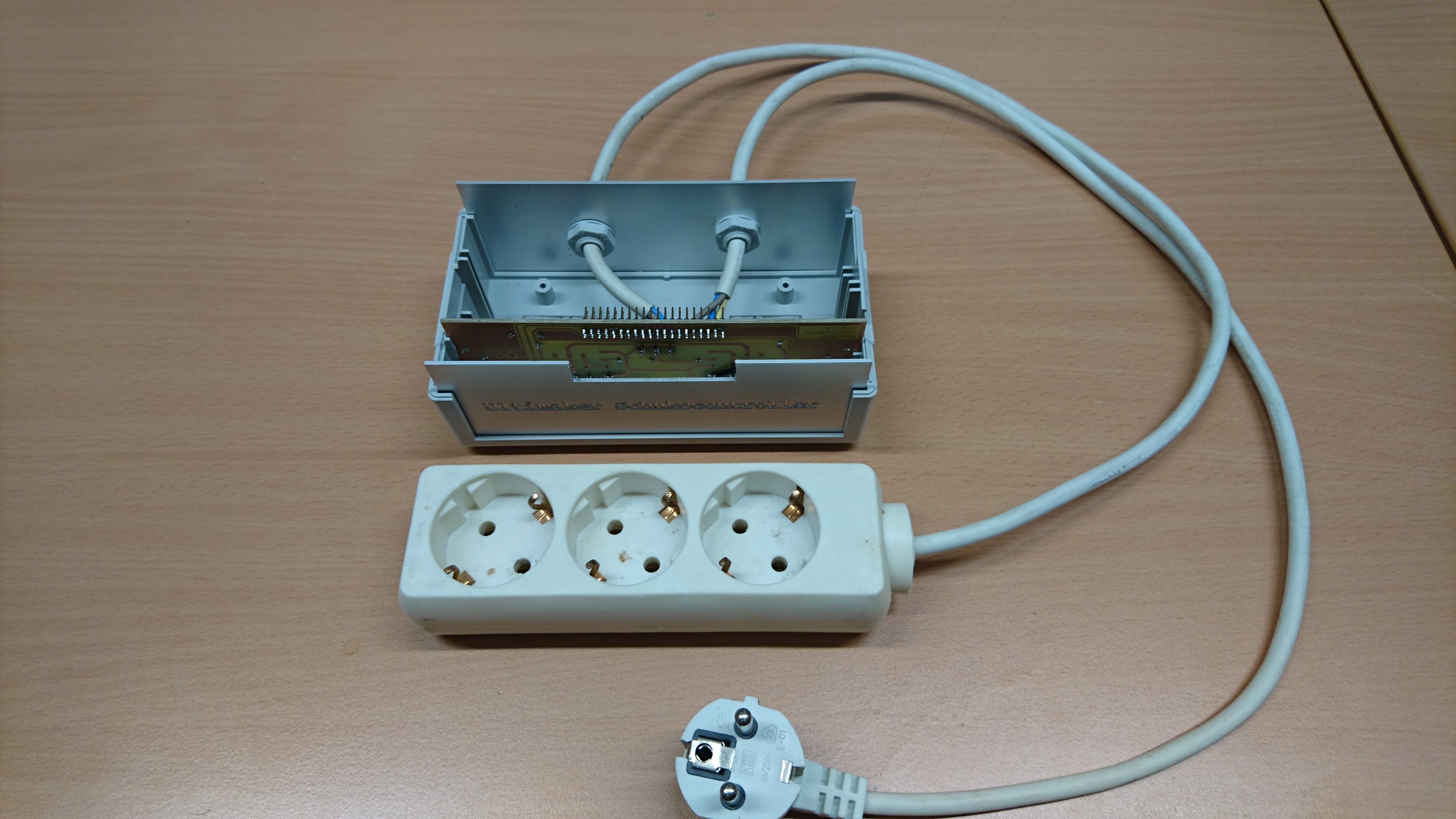
Da der Octoprint – Server nun aber auf einem Raspberry PI läuft, dessen GPIO Port – Pins einfach ungenutzt herumstehen :), bieten sich diese an, ein Interface zu bauen, das im Falle des Falles die Stromversorgung des Druckers abschalten kann. Eine, in ein kleines Kunststoffgehäuse eingebaute Relaisplatine soll an die GPIOs angeschlossen werden. Die Relaiskontakte werden dann daran angeschlossene Schuko Steckdosen schalten. Ich habe die Relaisplatine für vier Kanäle dimensioniert, um nicht nur den Drucker notabschalten zu können, sondern zukünftig auch ein Abluftventilator etc. damit zu schalten. Die Schaltbefehle werden dann direkt am Raspberry, über z.B. Python-Skripten, oder einfach nur bash Kommandos ausgeführt.
Hier ist die supereinfache Schaltung für den Aufbau der Relaiskarte dargestellt:
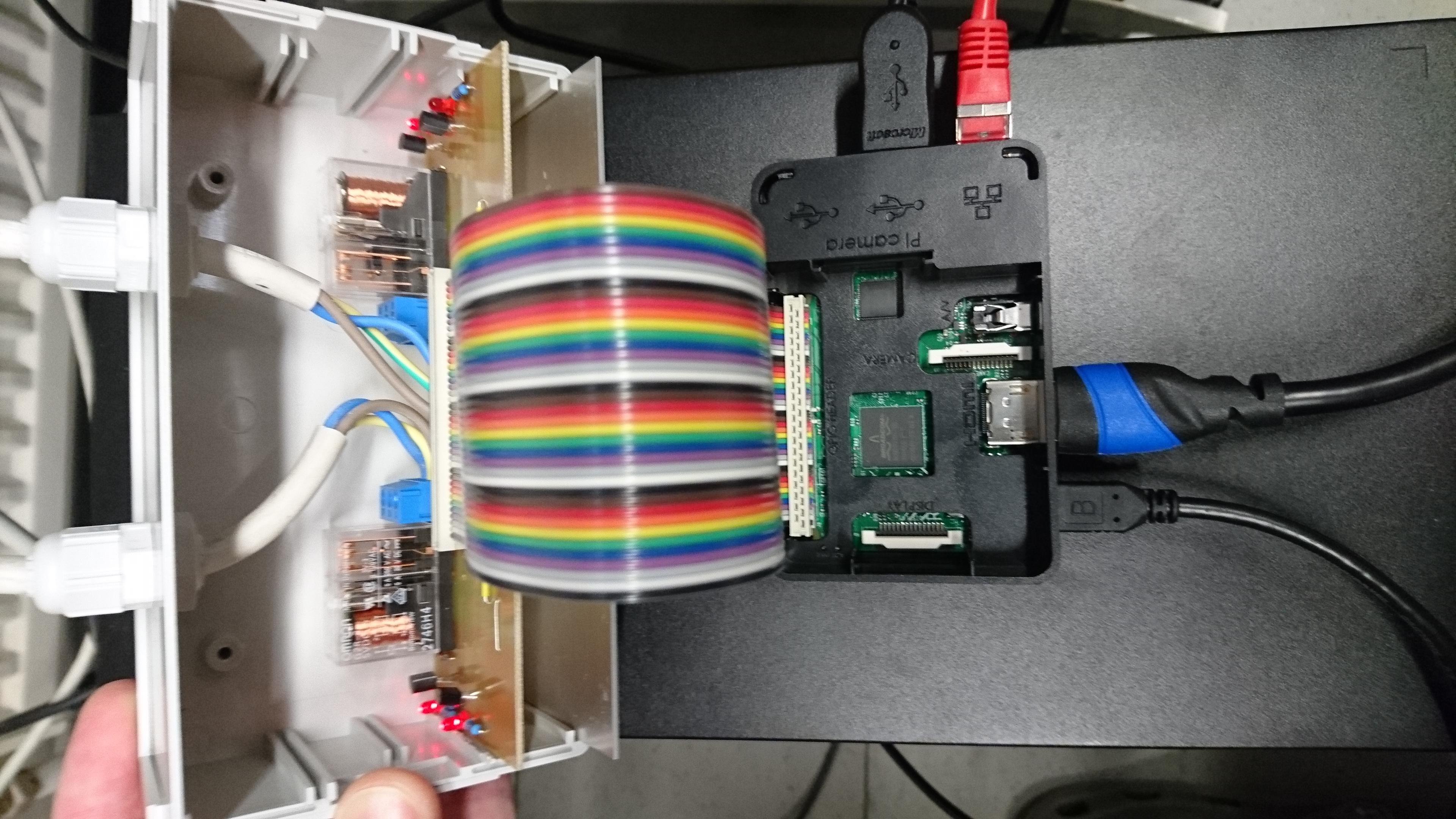
Vom Papier zur fertigen Platine und diese dann in ein Gehäuse eingebaut und per 40poliger Stiftleiste und Flachbandkabel an den Raspberry PI angesteckt, ist im folgenden Bild zu sehen. Als Geräte Bezeichnung ist mir „Ultimaker Schuko Controller“ eingefallen. Da die Aluminium-Frontplatte des Gehäuses wegen der Aussparung für das Flachbandkabel ohnehin in den Fräsbohrplotter musste, habe ich den Schriftzug „Ultimaker Schuko Controller“ auch gleich dort verewigt.
Die Hardware ist nun fertig und mit dem Raspberry verbunden. Als GPIO Pins habe ich, wie im Schaltplan zu erkennen, die GPIOs 08, 23, 24 und 25 verwendet. Als einfachen Test kann man die Relais jetzt über das Terminalfenster des Raspberry (entweder lokal, oder über einen Putty) ganz einfach ansteuern. Als Beispiel ist hier GPIO Pin8 angegeben:
Im letzten Teil des Projektes „Raspberry Pi als Datenlogger“ habe ich einen Raspberry Pi als Datenlogger für unterschiedliche Sensoren konfiguriert. Als Schnittstelle dient der I²C Bus und die RS232 Leitungen, an denen die Sensoren angeschlossen sind. Die Sensoren waren ein HYT939 (Luftfeuchtigkeit und Temperatur), ein BME280 (Luftdruck, Luftfeuchte und Temperatur) sowie ein Ultimate GPS Board an der seriellen Schnittstelle. Der Raspberry Pi ist dabei in eine Box eingebaut, wird mit einer Powerbank, die sich ebenfalls in der Box befindet, versorgt und stellt als Schnittstelle eine 8 polige RJ45 Buchse mit I²C und RS232 nach außen zur Verfügung. An diese Buchse können dann die Sensoren angeschlossen werden. Will man die Sensorik nun ändern, bzw. erweitern, so können einfach weitere I²C Bus – Sensoren angeschlossen werden. Es muss lediglich noch die Software (in diesem Fall Python Skripten) angepasst werden und schon können die Daten des neuen Sensors empfangen und aufgezeichnet werden. Wie aber geht das System um, wenn der Sensor nicht über I²C spricht? Wenn zum Beispiel ein analoger Wert eingelesen werden soll? Ganz einfach: Soll die Hardware des Datenloggers nun nicht mehr modifiziert werden, so muss man einfach dafür sorgen, dass der neue Sensor, der beispielsweise analoge Spannungen ausgibt, diese an eine, nennen wir sie Black Box weitergibt, die wiederum an ihrem Ausgang ein I²C Bussignal bereit stellt. Das kann dann wieder in das bestehende System integriert werden.
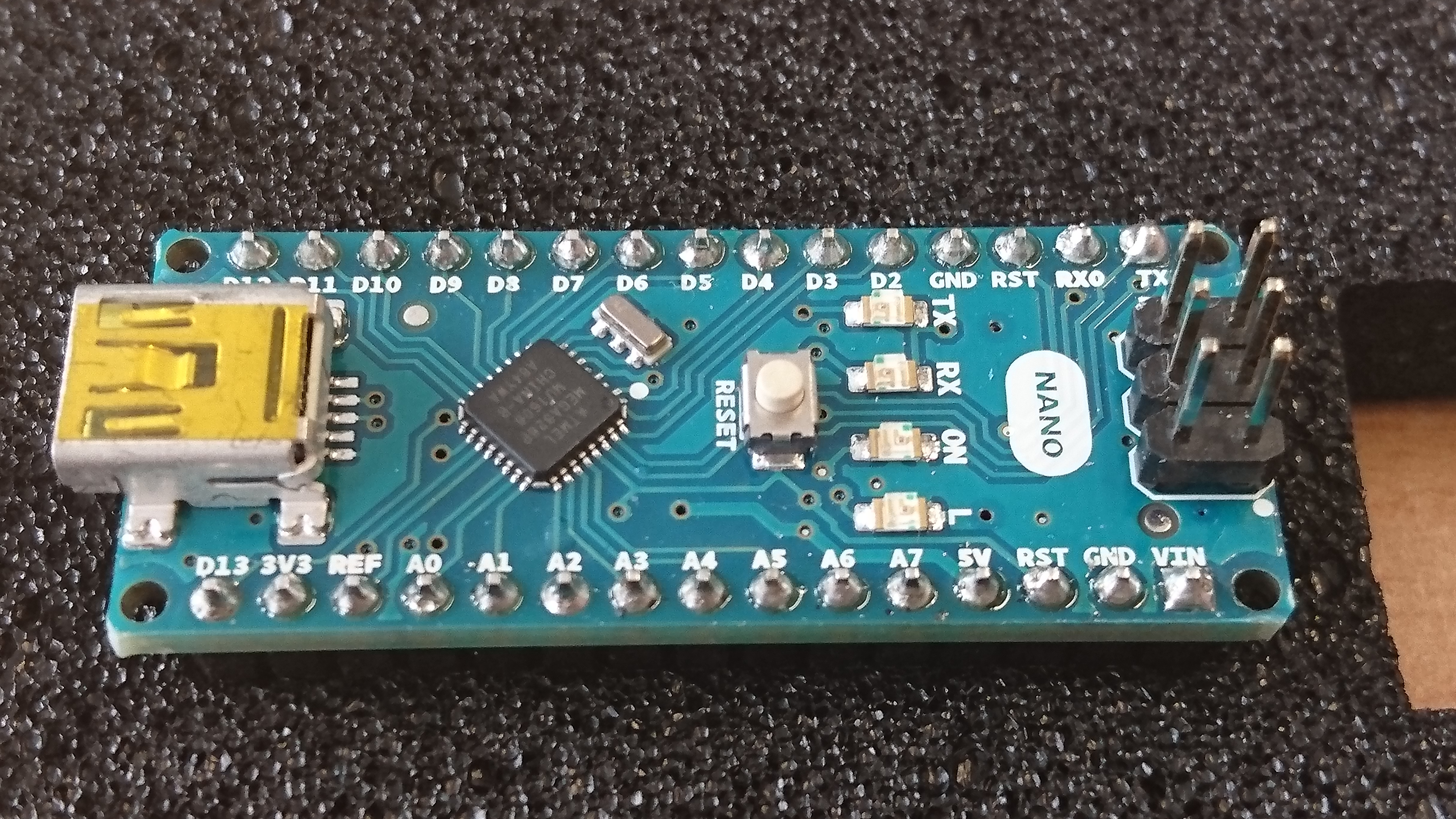
Arduino Nano als I²C Converter
Und genau diese Aufgabe erfüllt ein Microcontroller. Praktischer Weise habe ich diesmal einen Arduino Nano dazu verwendet. Der Arduino Nano mit dem Atmega 328 besitzt ja mehrere analoge und Digitale Eingänge, sowie zwei Interrupts. Über entsprechende Libraries ist einfach das I²C Bus Protokoll zu realisieren. Somit ist das geeignete Black-Box Gerät gefunden.
Der folgende Arduino Code stellt einen einfachen I²C Bus Slave dar. Die Busadresse soll beispielsweise 0x08 sein, von einer Messung haben wir den Messwert 1.3321 erhalten. Dieser Wert soll bei Anfrage an diese Busadresse gesendet werden. Das Beispiel sieht wie folgt aus:
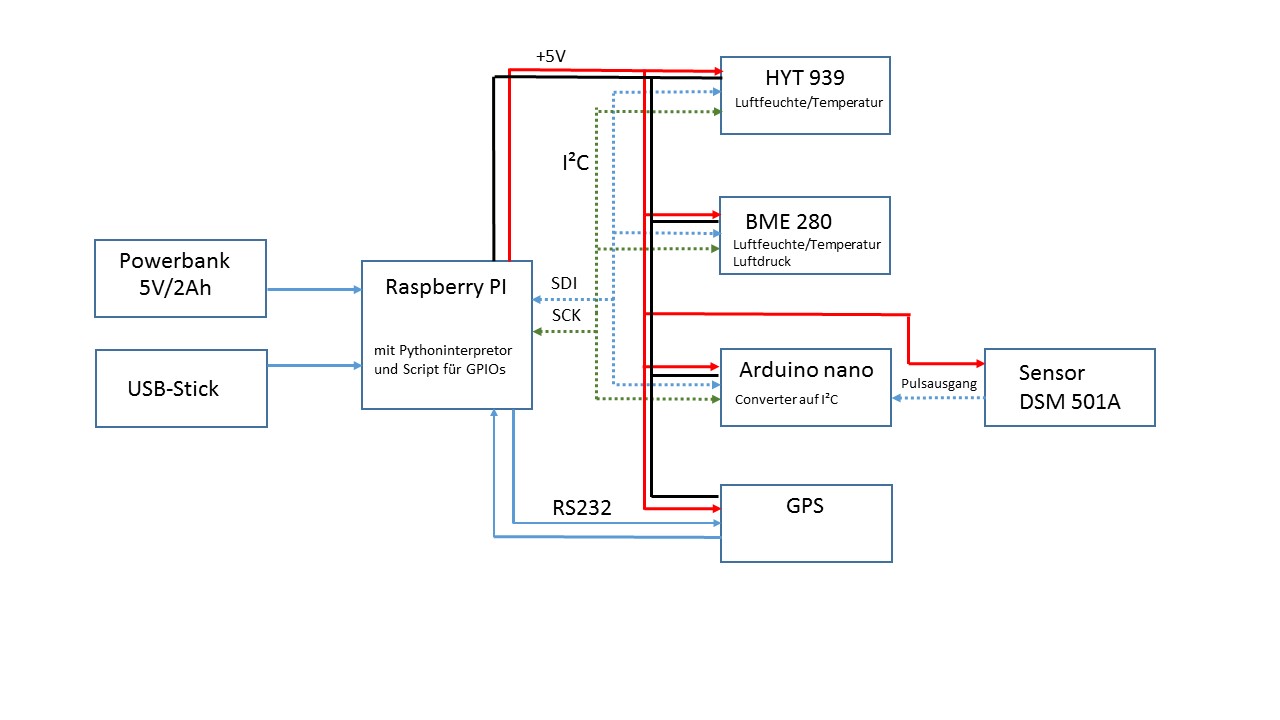
Im Skript ist eine Funktion „dtostrf“ zu sehen. Sie wandelt den Inhalt einer Variablen des Datentyps „floating point“ in ein Charakter Array um. Infos sind hier zu sehen. Im Python Interpreter des Raspberry können wir nun überprüfen, ob die Daten ankommen. Doch zuvor soll der gesamte Aufbau einmal schematisch dargestellt werden.
Schematische Darstellung des Systems
Sind alle Sensoren inklusive des Arduino angeschlossen, so kann das folgende Python-Skript aus der Linux Konsole des Raspberry aufgerufen werden:
# Reading data from arduino as sensor slave
# V0.1 by bihlo 09/2016
import smbus, time
bus = smbus.SMBus(1) # Raspberry Rev. 2
address = 0x08 # Fixed default address of Arduino
# Initialize sensor to acquire measurements
#def MeasurementRequest():
# void = bus.write_quick(address)
#time.sleep(0.1)
# Read from bus
def ReadMeasurement():
void= bus.write_quick(address)
time.sleep(0.1)
# Acquire 6 byte from sensor
Readout = bus.read_i2c_block_data(address,0,6)
out=''.join(chr(i) for i in Readout) #byte array von ascii in string wandeln
print "Antwort vom Arduino: ", Readout, " ."
print "Antwort als String: ", out
ReadMeasurement()
Wenn der Python Interpreter jetzt keinen Fehler meldet und der Inhalt der Variable „wert“ des Arduino in ASCII und im Klartext dargestellt wird, dann kann jetzt mit einem „richtigen“ Messwert eines Sensors weiter gearbeitet werden.
Partikeldetektor
Als Sensor soll an an den Arduino ein DSM501 Dust Sensor Module angeschlossen werden. Der DSM501A ist ein Staubsensor, der mit 5V bei einer Stromaufnahme von 90mA betrieben wird. Er erkennt Partikel ab einer durchschnittlichen Größe von 1µm bei einer Konzentration von 0 bis ca. 1.4mg pro Kubikmeter Raumluft. Laut Datenblatt und Herstellerinformationen wird die Luft im Bereich der Messkammer erhitzt, sodass eine Luftzirkulation entsteht. Die sich ständig bewegende Luft wird mit einem getakteten Lichtstrahl beleuchtet. Ein in einem Winkel zur Lichtquelle angebrachter Fotodetektor empfängt nun, im Falle dass sich Partikel im Licht befinden, dessen Streulicht. Die Intensität des Streulichtes ist von der Anzahl und Größe der Partikel abhängig und kann so erfasst werden. Als Ausgangssignal erzeugt der Sensor ein Puls/Pausensignal mit einer Periode von 100ms. Das Verhältnis von High- zu Lowtime stellt nun die Grundlage für die Berechnung der Partikelanzahl bzw. -dichte dar. Über einen Countereingang des Arduino werden die Impulse gemessen und der korrespondierende Partikelwert errechnet. Dieser Wert wird nun wie oben beschrieben als Busdatum für den I2C Bus herangezogen und bei Auslösen des Bus Events übertragen. Somit hat der Arduino die Aufgabe eines einfachen Protokollkonverters übernommen. Mit dieser Methode lassen sich alle möglichen Messwerte so aufbereiten, dass der Raspberry mit einer Schnittstelle damit umgehen kann.
Wie das im Detail funktioniert und wie der Code dazu aussieht, werde ich vielleicht später einmal posten.
Nach schon einigen Projekten und Versuchen mit dem Raspberry PI, bin ich immer wieder einmal auf die Problematik mit der schlechten, verrauschten Tonqualität des Raspi-Audioausgangs gestoßen. Der analoge Ton besteht ja nur aus einem einfachen PWM (PulseWidthModulation) Signal, das über ein paar Filtercaps direkt an die Klinkenbuchse des Raspberry geschaltet ist. Für viele Anwendungen reicht das sicherlich, wenn man nur eben einmal ein paar Töne ausgeben will. Soll´s aber Musik sein, oder wie in meinem Fall ein vernünftiger Ton bei der Retro-Gamestation, die mit „retropie und der EmulationStation“ läuft, so reicht die Qualität einfach nicht aus.
Hier sollte man dem Raspberry PI einen richtigen Soundchip, also Soundkarte verpassen. Im Internet wird man schnell fündig und so habe ich mir bei einem Onlineshop um gerade einmal 2,90 Euro eine USB – Soundkarte bestellt. Die Karte, oder besser, der USB Dongle besitzt zwei 3,5mm Klinkenbuchsen. (einen Audio-Ausgang und einen Mikrofon-Eingang)
Die Installation ist schnell durchgeführt. Will man ein bestehendes System umrüsten, so ist einfach der Klinkenstecker der Lautsprecherzuleitung vom Raspberry abzuziehen und in den Audioausgang des Raspberry einzustöpseln. Der USB Stecker kommt in einen freien Port des Raspberry.
Der Hardwareteil ist somit erledigt und es kann mit dem Anpassen der Software begonnen werden. Nach dem Booten der Retropi-Maschine und dem Einloggen in die Konsole kann man überprüfen, welche Geräte am USB-Bus erkannt wurden. Nach der Eingabe von:
pi@retropie:~ $ lsusb
werden alle am USB-Bus angeschlossenen Geräte gelistet:
Bus 001 Device 007: ID 1516:1603 CompUSA Flash Drive
Bus 001 Device 006: ID 03f0:034a Hewlett-Packard
Bus 001 Device 005: ID 16c0:05e1 Van Ooijen Technische Informatica Free shared USB VID/PID pair for CDC devices
Bus 001 Device 004: ID 0d8c:013c C-Media Electronics, Inc. CM108 Audio Controller
Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. SMSC9512/9514 Fast Ethernet Adapter
Bus 001 Device 002: ID 0424:9514 Standard Microsystems Corp.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
In diesem Fall ist der C-Media Electronics, Inc. CM108 Audio Controller unsere USB – Soundkarte. Als nächsten Schritt überprüft man die Reihenfolge (Priorität) der geladenen Soundmodule.
pi@retropie:~ $ cat /proc/asound/modules
Als Ergebnis kommt:
0 snd_bcm2835
1 snd_usb_audio
Das bedeutet die Soundausgabe des BCM2835 ist als erstes gelistet. Wir wollen jedoch alle Tonausgaben über den USB-Ausgang hören. Dazu muss die Datei „alsa-base.conf“ wie folgt angelegt werden. (auf einigen Systemen ist sie bereits vorhanden – hier sind dann nur die Prioritäten anzupassen)
Mit „control+O“ wird gespeichert und mit „control+X“ kann der Editor beendet werden. Jetzt ist das System zu rebooten. Nach dem Neustart kann in der Konsole nochmals mit:
pi@retropie:~ $ cat /proc/asound/modules
die Reihenfolge der Module überprüft werden. Die sollte jetzt so aussehen:
0 snd_usb_audio
1 snd_bcm2835
Jetzt sollten in der Emulationstation wieder Töne zu hören sein. Diesmal aber ohne Rauschen und kristallklar 😀
In Teil1 dieses Projektes haben wir dem Raspberry ein Betriebssystem verpasst und das ein wenig für die Anwendung aufbereitet. Wir wollen ja an den PI mehrere Sensoren anschließen und diese dann zyklisch auslesen und die Daten in einer Datei auf einem USB-Stick speichern. Die Aufzeichnung soll so lange laufen, bis ein Taster gedrückt wird, der den Prozess beendet. Die einzige Anzeige des PI sind zwei Leuchtdioden, die, sowie auch der Taster, an die GPIOs des PI angeschlossen sind. Darum haben wir folgende Punkte bereits erledigt:
Die PI Platine gemeinsam mit einer USB Powerbank in ein Gehäuse eingebaut
Anschlüsse wie Ethernet, USB, HDMI durch Ausschnitte im Gehäuse nach außen geführt
Zwei Leuchtdioden und einen Taster ins Gehäuse eingebaut und auf die GPIOs geschaltet
Den I²C Bus des PI auf eine Buchse im Gehäuse geführt
Eine MicroSD Karte mit einem Raspi-Wheezy Image bespielt
Einen USB-Stick mit FAT32 formatiert
Das Betriebssystem soweit konfiguriert, dass das Filesystem für den Stick, alle Module für den I²C, sowie Python geladen werden.
Raspberry PI im Plastikgehäuse
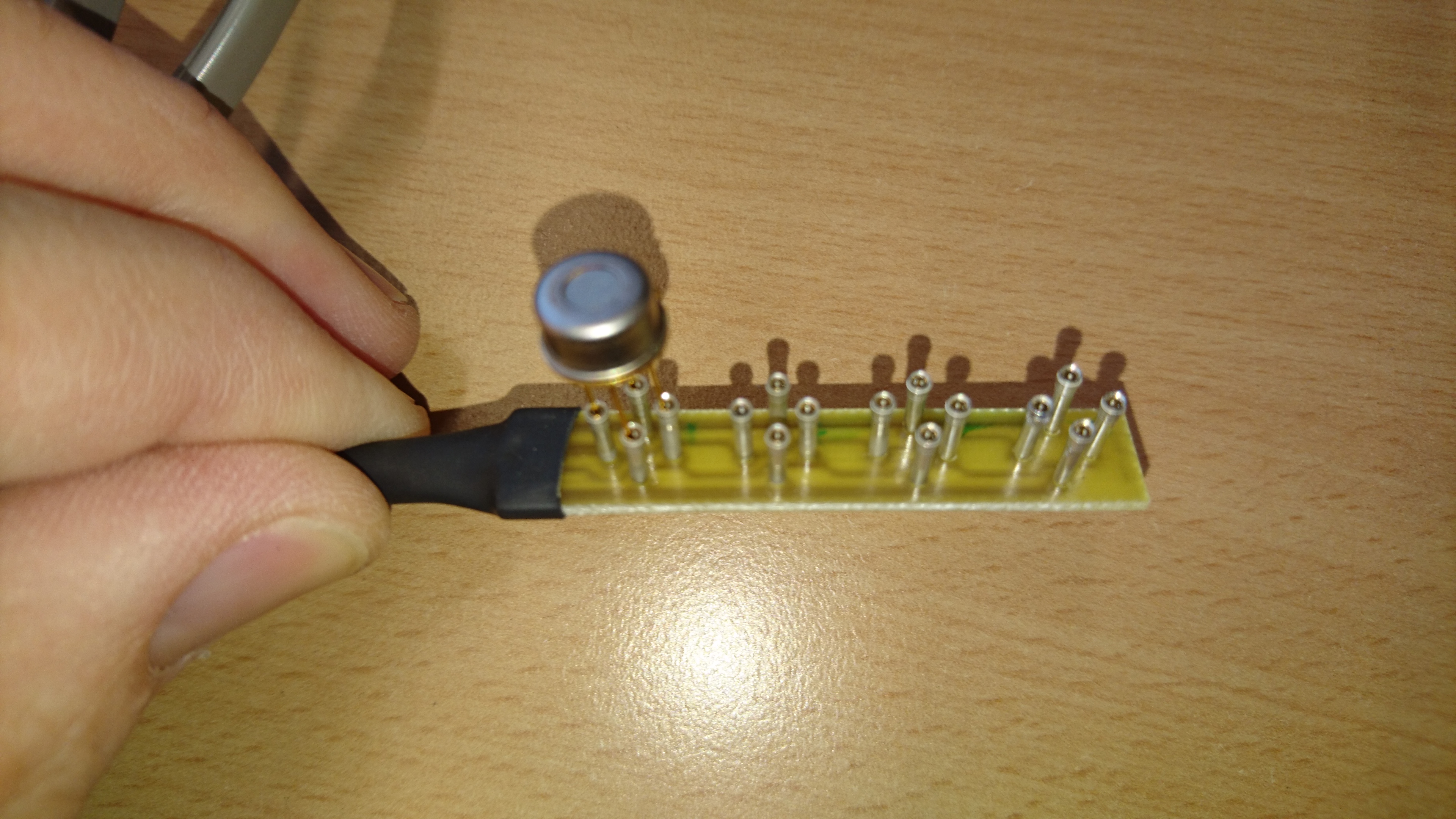
Der Pi sieht fertig zusammengebaut nun so aus (siehe Bild rechts). Nun können die Sensoren angeschlossen werden. In diesem Fall handelt es sich um Luftfeuchtigkeits-/Temperatursensoren mit der Bezeichnung HYT939 des Herstellers Hygrochip. Hier ein Auszug der technischen Daten aus dem Datenblatt des Herstellers:
Ausführung: Feuchtesensor im TO39 Gehäuse, druckfest, mit Edelstahl-Sinterfilter
Genauigkeit: Feuchte ±1,8% rF, Temperatur ±0,2 °C Genauigkeit 0…10% rF (0 … 50°C): ±(0,1% rF + 17% aw) Messbereich: Feuchte 0 … 100% r.F. (max. dp = +80 °C), Temperatur – 40 … +125 °C Abmessungen: 5,2 x 9 mm Anschlüsse: TO 39 Footprint Auflösung Feuchte: 0,02% rF Hysterese bei 50% rF: < ±1% rF Linearitätsfehler: < ±1% rF Ansprechzeit t63: < 10 sec (Mit Edelstahl-Sinterfilter) Auflösung Temperatur: 0,015 °C Digitale Schnittstelle: I2C, Adresse 0x28 oder Alternativadresse Betriebsspannung: 2,7 … 5,5 V Stromaufnahme (typ): < 1µA in Bereitschaft < 22µA bei 1Hz Messrate 850 µA maximal
HYT939 Sensor
Eine kleine Platine dient als „Sensorboard“. Hier besteht die Möglichkeit, vier HYT´s anzustecken. Natürlich müssen auch die Adressen der Sensoren unterschliedlich sein. Der HYT939 ist per default auf hex 0x28 eingestellt. Will man diese Deviceadresse ändern, so muss der der HYT in den Command-Mode versetzt werden, um dann die Konfigurationsdaten empfangen und in sein EEprom schreiben zu können. Dazu muß der Sensor innerhalb der ersten 10ms nach seinem PowerUp in den Command-Mode gebootet werden. Das lässt sich am einfachsten mit einem ArduinoUno bewerkstelligen… Dabei wird der Powerpin des HYT über einen Digital Out Pin des Arduino versorgt. So ist es möglich, das Timing genau einzuhalten und den Command Mode zu erreichen.
Nachdem der Sensor nun an den Raspberry angeschlossen ist, fehlt nur mehr ein Programm, um ihn oder auch mehrere anzusteuern und auszulesen. Hier verwende ich den Python Interpreter. Damit lassen sich auf einfache Weise die Daten auslesen und auch auf Datenträgern speichern. Das „Programm“ besteht aus zwei Teilen:
Hauptscript: beinhaltet nur eine Endlosschleife, die die LEDs steuert, den Taster abfragt, die Sensorfunktion aufruft, deren ausgelesene Werte übergibt, aufbereitet und auf den Stick speichert.
Funktion Sensor auslesen: addressiert den I²C Bus, liest die Sensordaten aus, rechnet sie in lesbare Werte um und übergibt den Output an die Funktion
# /usr/bin/python# License: GPL 2.0# edited by Ingmar B. Aug.2015import osfrom time import *import timeimport threadingimport hyt939o import RPi.GPIO as GPIO# Setup LED Ports (pin12 = LED rot, pin18 = LED gruen)GPIO.setwarnings(False)GPIO.setmode(GPIO.BOARD)GPIO.setup(12, GPIO.OUT)GPIO.setup(18, GPIO.OUT)GPIO.setup(16, GPIO.IN)# LED Gruen einschalten sobald das Script gestartet istGPIO.output(18, GPIO.HIGH)#gpsd = None #seting the global variableaddress = [0x2a, 0x29] #hyt939 = [0, 0]hum = [0, 0]temphyt = [0, 0]loopon = True #set variable for loopi=1 #counter for address selectionos.system('clear') #clear the terminal (optional)while loopon: # bei beginn des auslesens aller daten die rote Led einschalten GPIO.output(12, GPIO.HIGH) if GPIO.input(16)== GPIO.HIGH: loopon = False os.system('clear') # Variablen fuer Sensor HYT 939 uebergeben for i in range(2): hyt939=hyt939o.ReadMeasurement(address[i]) time.sleep(0.1) hum[i]=hyt939[0] temphyt[i]=hyt939[1] print '--------------------------------------- ' print 'SENSORS reading Sensor Nr.:' , i print print 'humidity hyt939 ' , hum[i] print 'temperature hyt939 ' , temphyt[i] print '--------------------------------------- ' print print 'data to write:' , str(hum[0]), str(temphyt[0]), str(hum[1]), str(temphyt[1]) print ("date :" + time.strftime("%x")) print ("time :" + time.strftime("%X")) print date = time.strftime("%x") zeit = time.strftime("%X") ## write all data to usbstick fileout = open("/media/usbstick/wetterfrosch.txt", "a") time.sleep(0.1) fileout.write(date+";"+zeit+";"+str(hum[0])+";"+str(temphyt[0])+";"+str(hum[1])+";"+str(temphyt[1])+"\n") time.sleep(0.1) fileout.close() time.sleep(0.1) # nach schreiben bzw auslesen der daten rote LED wieder abschalten GPIO.output(12, GPIO.LOW) time.sleep(0.8) #set to whateverGPIO.output(18, GPIO.LOW) # gruene Led ausschaltenprint "Ende"
Das folgende Listing liest den Sensor aus:
# Reading mesaurements from HYT 939 humidity and temperature sensor # First Version by Caerandir May 2014 modified by i.bihlo 2015
import smbus, time bus = smbus.SMBus(1) # Raspberry Rev. 2 address = 0x28 # Fixed default address of HYT 939
# Calculiere die relLF in % aus den vier Bytes in "Readout" RelHum = Readout[0]<<8 | Readout[1] RelHum = RelHum & 0x3FFF RelativeHumidity = 100*RelHum/(2**14)
# Calculiere die Temperatur vom Sensor Readout[3] = Readout[3] & 0x3F temp = Readout[2]<<6 | Readout[3] Temperature = 165.0*temp/(2**14)-40 print "Hrel: ", RelativeHumidity, " %" print "T: ", Temperature, " C"
return RelativeHumidity, Temperature
MeasurementRequest() time.sleep(0.2)
ReadMeasurement()
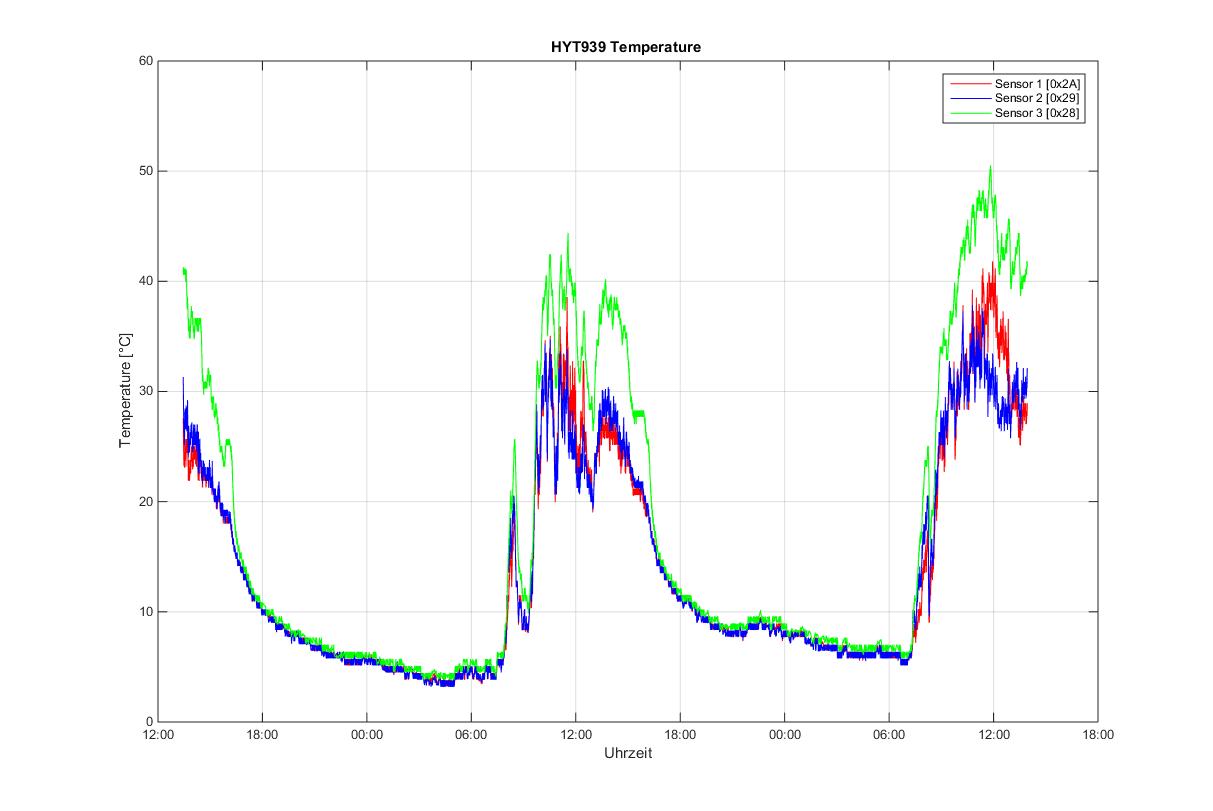
Eine Versuchsmessung über einen Tag und eine Nacht mit drei Sensoren hat folgendes Ergebnis geliefert. Hier sind die Temperaturwerte der Sensoren dargestellt. (Die Daten vom USB-Stick wurden mit Matlab importiert und daraus ein Plot erstellt.)
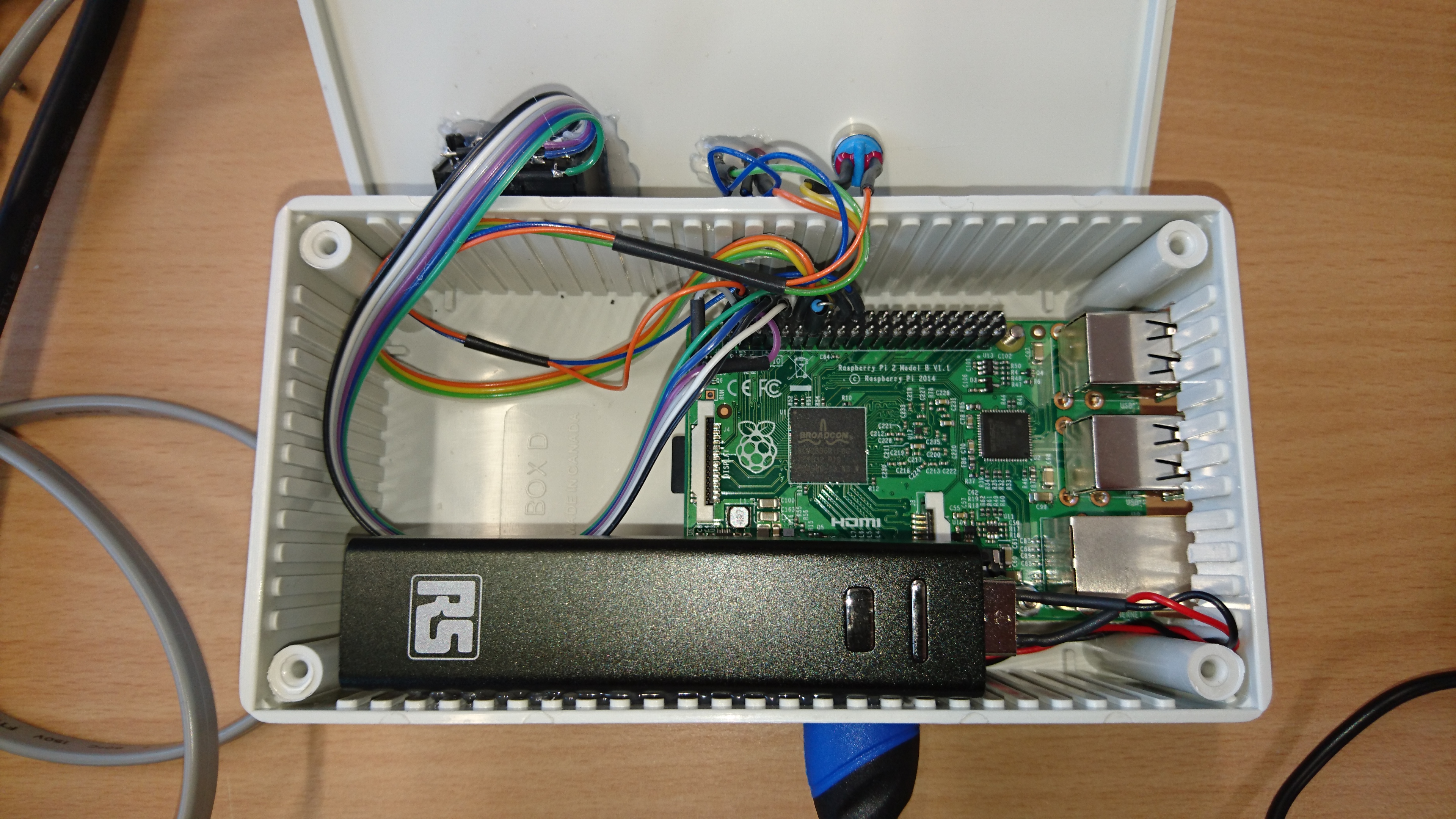
Der Raspberry Pi ist ja mittlerweile ein bekannter und beliebter Scheckkartenplatinen-Computer mit dem sich allerlei anstellen lässt. Vom TV-Frontend mit Kodi, über Spielekonsolenemulatoren mit Retropi bis hin zum Bürorechner, ist damit fast alles möglich. In diesem Projekt möchte ich vorstellen, wie mit Hilfe des Raspberry Pi Model2 physikalische Größen wie Temperatur und Luftfeuchtigkeit gemessen und auf einem Speichermedium geloggt werden. Und zwar mit einem Feuchtesensor der Type HYT939 der am I²C Bus angeschlossen wird, genauer gesagt: mehrere I²C Feuchtesensoren am Bus…
Wir beginnen zuallererst mit der Versorgung des Raspberry PI. Im Bild ist ein Pi2 in ein einfaches Kunststoffgehäuse eingebaut und an eine 2Ah USB-Powerbank von RS-Components angeschlossen. Der Ladeanschluss der Powerbank ist vom Gehäuse nach aussen geführt. So kann der Pi wahlweise über die Powerbank (mit einer nicht rechenintensiven Anwendung bis zu 3h) oder über eine externe USB-Versorgung (z.Bsp. einem Handyladeadapter) betrieben werden. Der I²C Bus des PI (Pin 3 SDA und Pin 5 SCL sowie Pin 2,4 +5V und GND an Pin 6,14…) ist auf einen RJ Stecker im Gehäuse ausgeführt. Um später irgendwelche Statusmeldungen ausgeben zu können, sind zwei LEDs an die GPIOs 24 und 18 (an Pin18 und Pin12) angeschlossen. Ein weiterer GPIO wird über einen 22k Pulldown-Widerstand an einen Taster an 5V geschaltet. (GPIO23 an Pin16).
Für die USB Anschlüsse, Ethernet und HDMI wurden im Gehäuse passende Ausschnitte gemacht, an eine USB Schnittstelle ein Keyboard und an den HDMI Port ein Monitor angeschlossen. Die LAN Verbinung mit Internetzugang sollte auch hergestellt sein, um nach der Ersteinrichtung die benötigten Module und Updates laden zu können.
Jetzt fehlt nur noch das Speichermedium mit Betriebssystem. Der PI2 ist mit einem Micro-SD Slot ausgestattet. Ich habe hier eine 4GB Micro SD mit einem raspian-wheezy image bespielt. Um das Imagefile auf einfache Weise auf die SD-Karte zu bekommen, empfiehlt es sich, das Tool win32diskimager zu verwenden. Ist die Speicherkarte dann fertiggestellt, kann man beginnen.
Der Raspberry zeigt nach dem Einschalten kurz seinen Farbverlauf und dann beginnt auch schon der Bootprozess. Ist der dann beendet, so startet das OS am PI erstmal eine Setup-Routine.
Hier sind nun folgende Schritte durchzuführen:
im Menu internationalisation options unter I1 die entsprechenden locals einstellen -> DE_UTF_8
in advanced options unter A2… einen Hostname vergeben z.Bsp.:“raspisensor“, in A4… SSH enablen, in A7 …I²C enablen und „load per default“ und in A8 … „serial enable“ und „login shell“ aktivieren
dann noch expand filesystem wählen damit der Speicherplatz der gesamten SD-Karte genutzt wird
jetzt noch mit finish -> reboot neu starten
Jetzt fährt der PI wieder hoch und bleibt beim Login-Prompt stehen. Mit login: pi und dem passwort: raspberry loggt man sich nun ein. Mit den folgenden Kommandos werden Updates und benötigte Module installiert:
sudo apt-get update
sudo apt-get install python-smbus (installiert den system management bus) sudo modprobe i2c_bcm2708 (kernelmodule für I²C von Hand laden) sudo modprobe i2c_dev lsmod (geladene Module listen) sudo i2cdetect -y 1 (I²C ports scannen)
Es empfiehlt sich, die Kernelmodule per Autostart zu laden. Das geht wie folgt:
sudo nano /etc/modules (mit dem Nano-Editor die Datei modules öffnen …)
dann folgende Zeilen hinzufügen:
i2c_bcm2708 i2c_dev
dann mit STRG+X den Editor beenden und bei Speichern JA wählen.
danach mit:
sudo nano /etc/modprobe.d/raspi-blacklist.conf
überprüfen, ob hier bereits ein Eintrag „blacklist i2c-bcm 2708“ existiert.
Falls ja, ist der auszukommentieren oder zu löschen.
jetzt wieder neustarten mit:
sudo shutdown -r now
danach wieder einloggen und mit
lsmod
überprüfen ob die gwünschten Module korrekt geladen sind.
Da wir später die Daten von den Sensoren in eine Datei loggen wollen und diese Datei auf einem USB-Stick gespeichert werden soll, sind folgende Schritte notwendig:
einen USB-Sick mit FAT32 Filesystem auf einem Windowsrechner formatieren
auf dem PI das Filesystem FAT32 installieren
den Stick in den PI stecken und die Mountlist um den Stick erweitern

 Schritt 2: Ausschneiden und Zusammenkleben
Schritt 2: Ausschneiden und Zusammenkleben