Robotic – Arm – Calculator:
Done by Fercher Richardo and Egarter Rene’.
Supervisor Peter Reisner.
Student Projects where i was involved.
Done by Fercher Richardo and Egarter Rene’.
Supervisor Peter Reisner.
Some nice images from our last electronic laboratory. ![]()
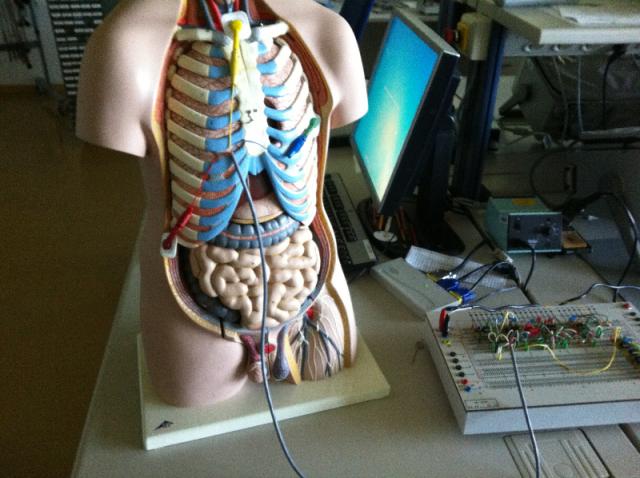
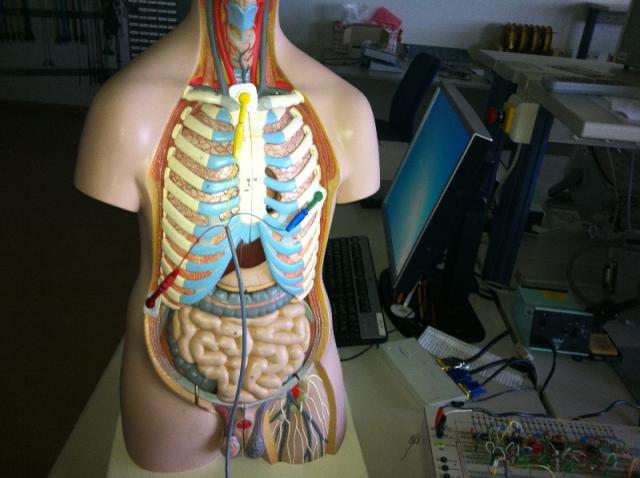
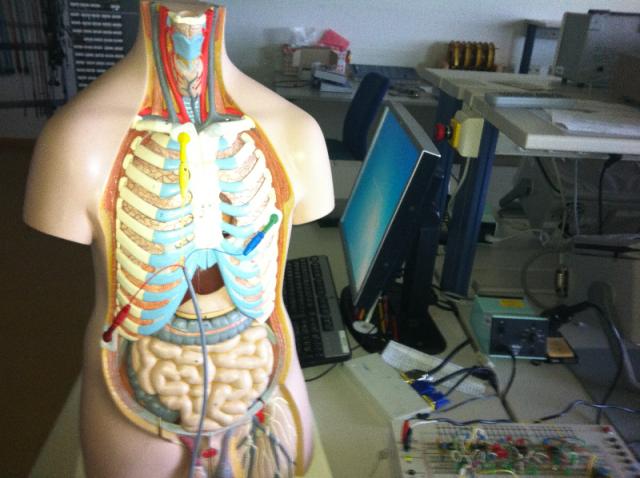
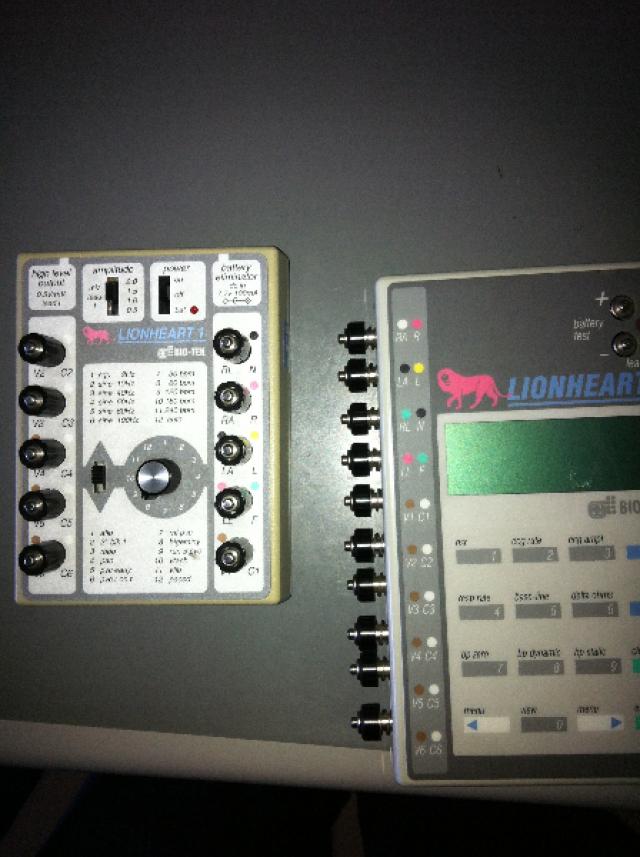
These photos show our medical electronic lab tutorial/lecture held by Matthias Haselberger
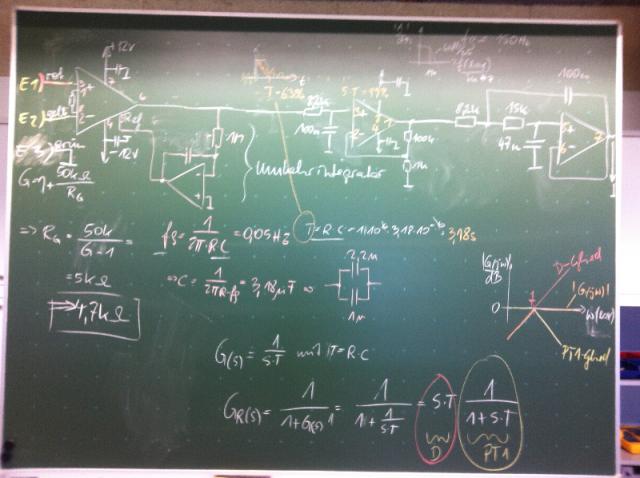
In these lab tutorials we teach our students the basic techniques used in medical biosignal acquisition devices such as electrocardiogram, electromyogram and biofeedback acquisition. After the tutorial the students are familiar with common amplifier circuits and also with complex instrumentation amplifier concepts.
have fun
Mario
This photos show our medical project seminar lab tutorial/lecture held by Matthias Haselberger
The aim of the laboratory is to get familiar with the commonly used micro-controller devices used to measure and process biofeedback signals.
have fun 🙂
Mario
Thx MrSputnik for evolving it (1 day eh. 🙂 ).
Carry On My Wayward Son(s) 🙂
[local /files/2010/11/Film_3.flv]
This time he is building our heavy current switch.
[local /files/2010/10/0001.flv]
thx Markus
 One week ago the Android part of the mobile application has started. Two students and Markus, the Android-Application project leader, are going to develop the Android version of the current iPhone app. prototype.
One week ago the Android part of the mobile application has started. Two students and Markus, the Android-Application project leader, are going to develop the Android version of the current iPhone app. prototype.
Fortunately he has managed to get the cell phone carrier Orange on board. Orange has sponsored two state of the art smart phones (Samsung Galaxy Leo) running Android OS version 2.2 for the development of the app. The project has officially started and now we are all looking forward to get all the parts of the project, the middle ware (which is my part), the iPhone app and the Android-app. up and running.
have fun
Markus & Mario
The goal was to build a BLCD Motor Test-Stand to measure how electric current and buoyancy are changing on several different motor propeller combinations. The motor/props tests are mainly focused for usage with Quadrocopter like vehicles. Furthermore Amir (Godfather of Quadrocopters)
came up with the idea to measure the Tau63 for the PT1 transmission behavior.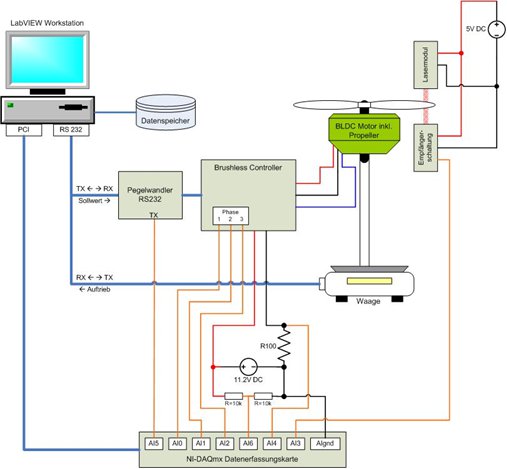
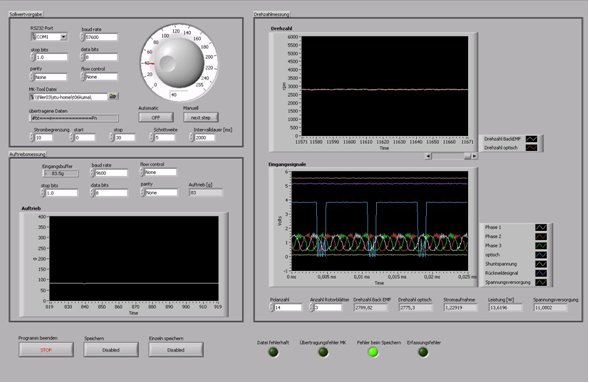
The software part is entirely written in G (LabVIEW). For data acquisition we used the NI PCI-6024E interfaced via DAQmx.
With DAQmx you can set up your measurement hardware very easily (see next snippet).

Measured signals are:
Sampling rate = 10kHz
For the measure of the buoyancy force we use a weighing machine 🙂 (see gallery)
To measure the motor/prop. speed we used two different measuring methods.
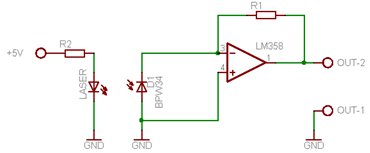
1. Laser module and a photodiode:
As you could see in the circuit diagram it is very high sophisticated 🙂
2. Via Back EMF (back electromotive force)
Back EMF is the voltage that pushes against the current which induces it. This voltage can be used to measure the motor speed.
Some Results for the electric current versus buoyancy measurements:
Some Results for the Tau63 measurements:
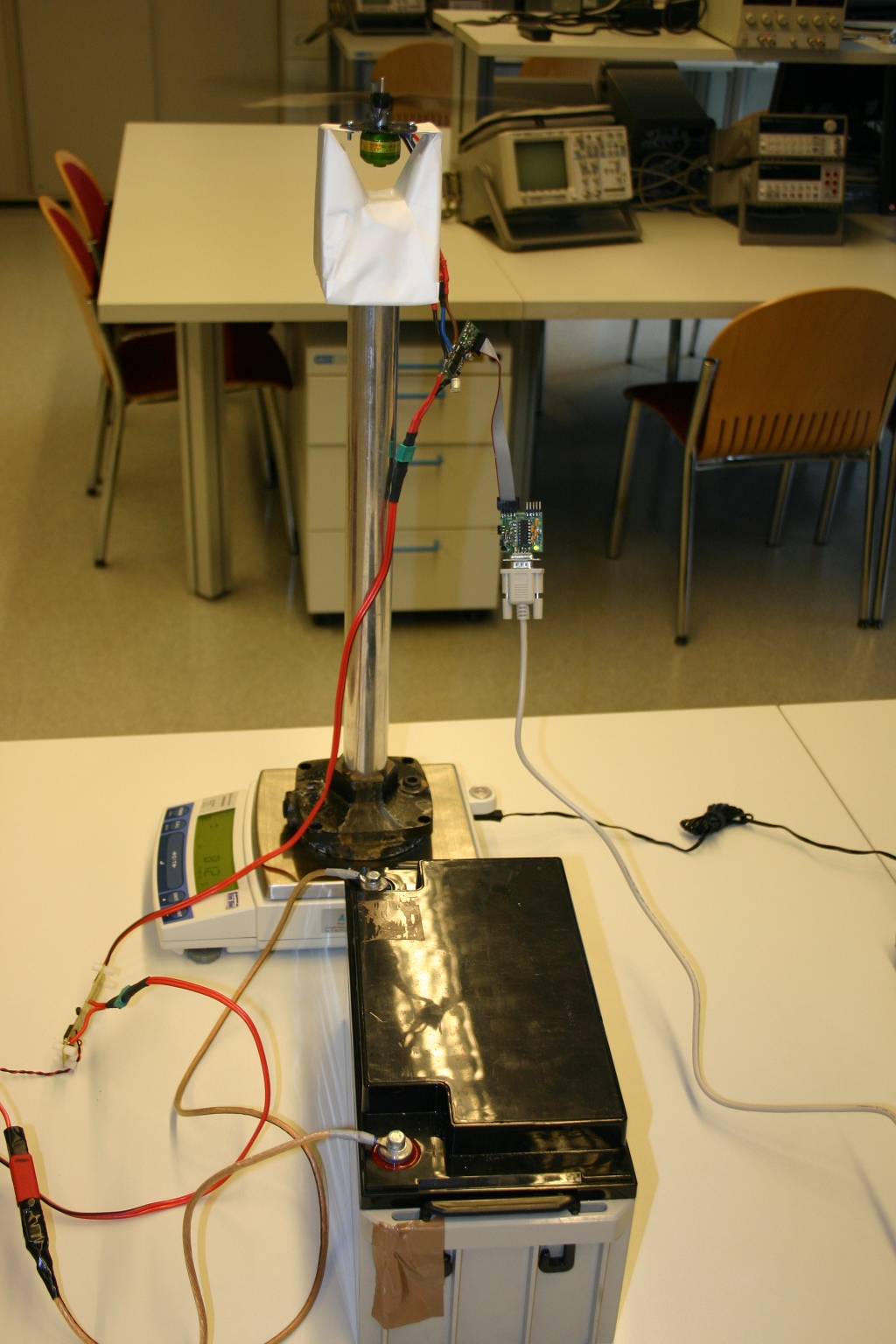
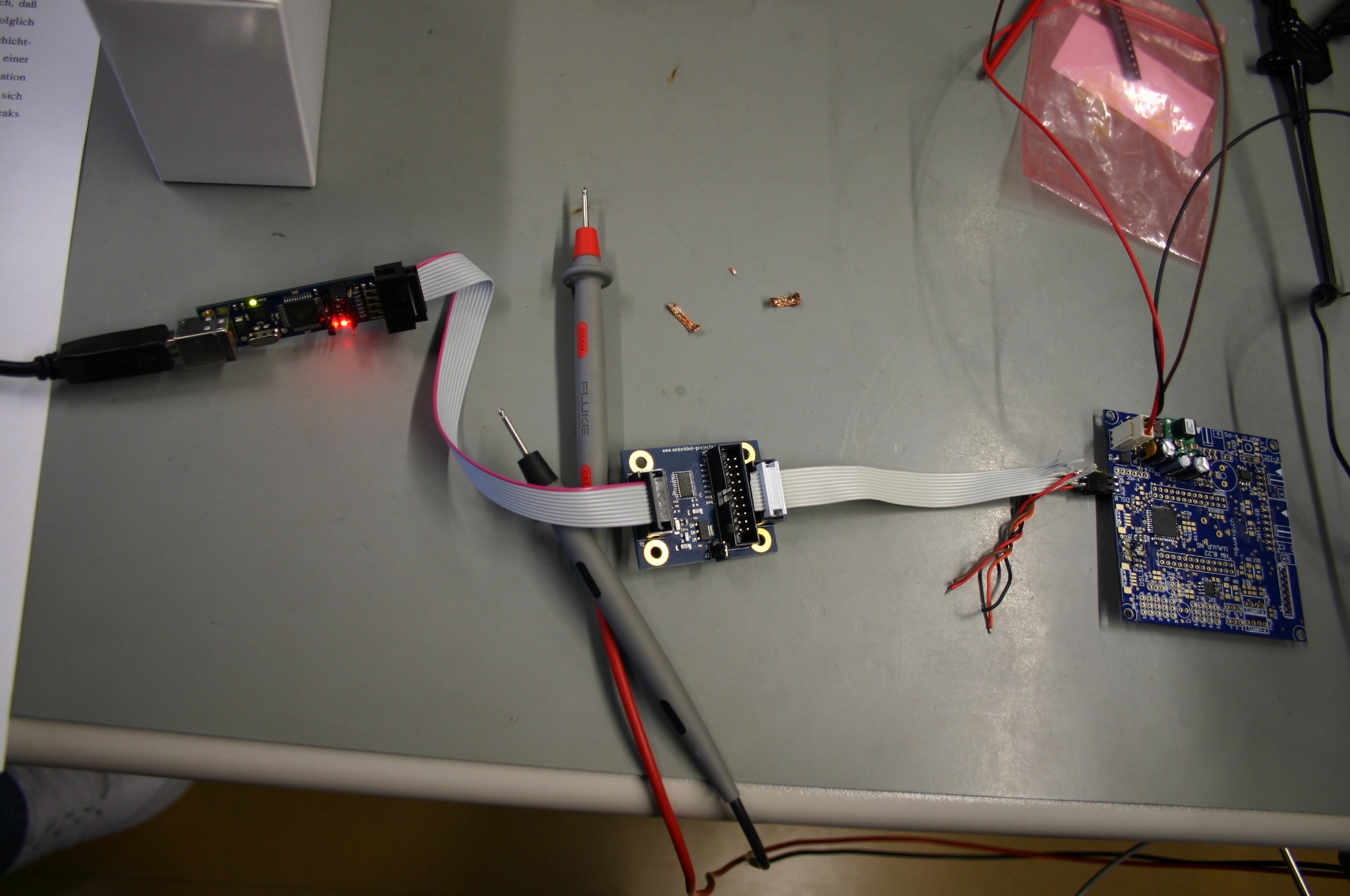
Last but not least, Ladies and Gentleman let me introduce you the Test-Stand itself 🙂
Yesterday a student from another study course asked me if I can help him to get Nagios with NDO support and NagVis up and running. The main focus of his study course are Network Technologies but for some reason nobody could help him, hmm lol. So I did the job :-), once more. Nagios is the swiss army knife among the IT infrastructure monitoring systems. It follows the OpenSource Way of life, which promises a big community, a lot of contents concerning problems which could arise , in one word – getting the system up an running should not be a big deal. I thought…..
Linux seems to be a dark horse @Net….who would have thought it? So….first we started with a short overview about Linux distros, and the essential stuff you should know about. Original he came up with SUSE, so first we did a s\SUSE\Ubuntu. The Lucid release should suit his needs. The students plan was to compile everything from scratch, humpf, after introducing him into synaptics and the build- in-search-function we decided to give the precompiled stuff a try.
It turns out that all needed packages are in universe. Some clicks later we had installed Nagios, MySQL and the Mysql-NDO Module.
After configuring the nagios.cfg and the database accountings/schema we got the core up and running.
The next step would be to get ndo2db up. Nd02DB acts as a persistence layer for storing Nagios events and configuration data in the database. The DB is the interface between Nagios and Nagvis. To get your data to the DB you have to run ndo2db in daemon mode and provide the ndomod.o for loading.
The Nagios How To speaks about ..
broker_module=/usr/local/nagios/ndo/ndomod.o config_file=/usr/local/nagios/etc/ndomod.cfg
For at least ubuntu you have to change it to….
broker_module= /usr/lib/ndoutils/ndomod-mysql-3x.o config_file=/etc/nagios/ndomod.cfg
Don’t forget to alter the ndomod.cfg.
Check that:
We run into the problem that first we could not start the nd02db daemon. The problem was a combination between access rights to the *.o module and an sytax error in the ndomod.cfg file.
After resolving it we were able to start the ng2db daemon and after that Nagios with the ndomod-mysql-3x. 🙂
Next step was to bring NagVis online. Since NagVis GUI is written in PHP you have to make sure you have all essential PHP stuff installed. Check you configuration
/etc/nagvis/nagvis.ini.php) for the DB schema name/credentials.
If you encounter problems to reach NagVis via HTTP: Make sure you have included the /etc/nagvis/apache.conf in your apache conf.d folder.
NagVis uses basic authentication, so first you have to login to Nagios and then you could try to call ../nagios/nagvis.
Have fun.
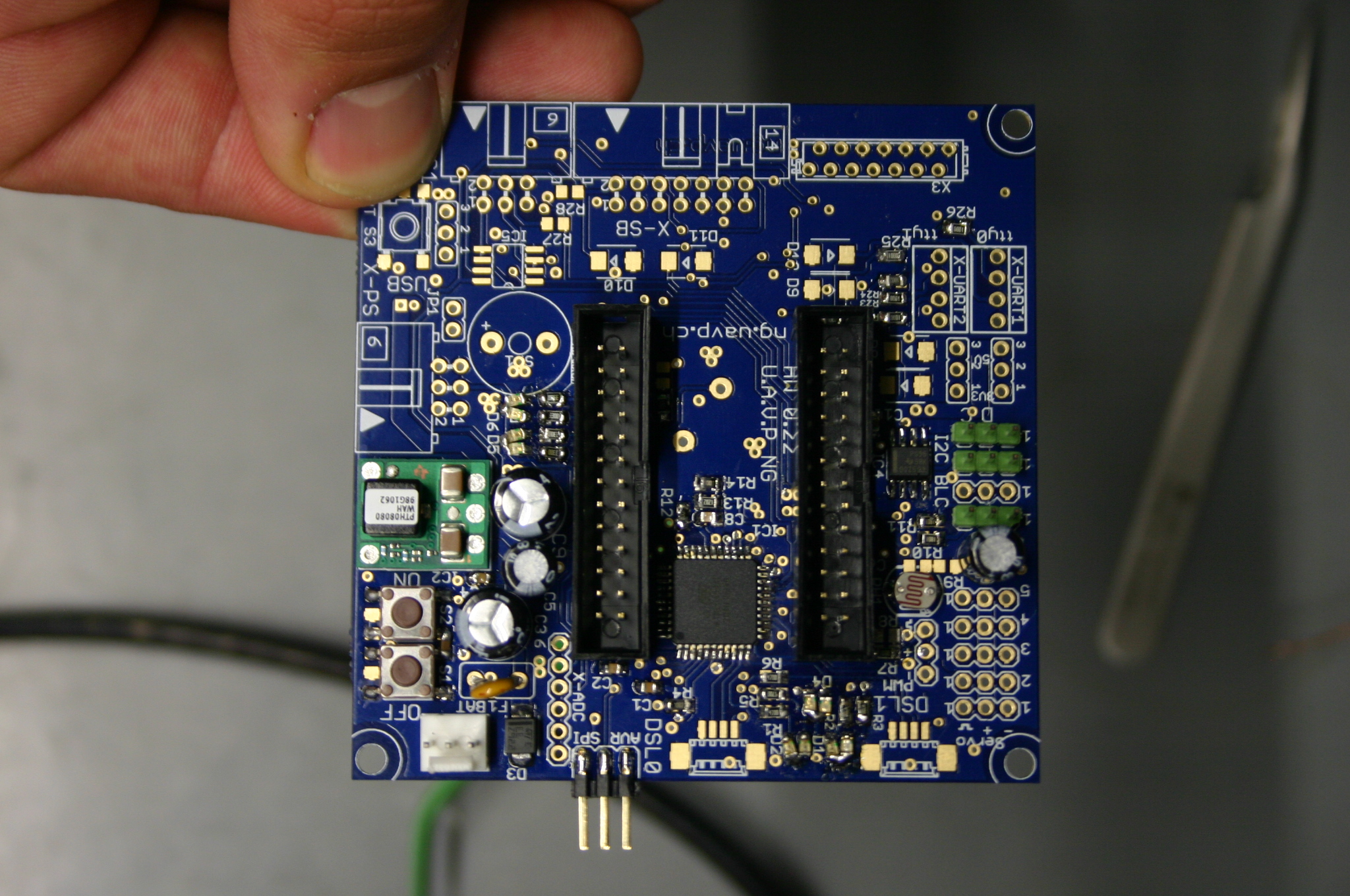
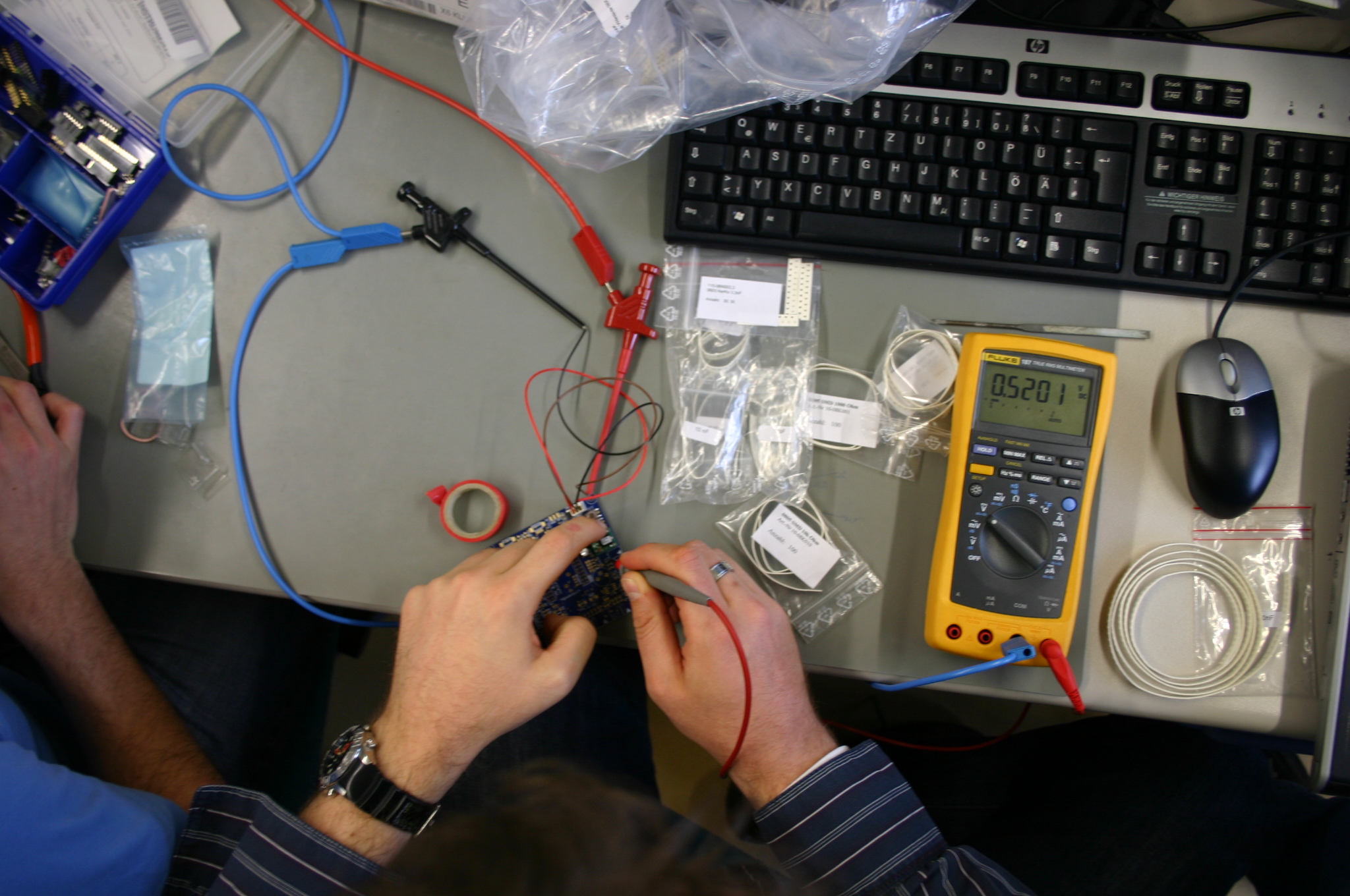
The idea here is to show our students how theory and practice can be combined and this is shown through the QuadroCopter example. Since the major components of such a system would cover most of the key course elements I thought my fellow workers would take some of the ideas/themes into their courses. LOL, but the response was zero. No matter, I already was changing to my new field of study (MedIT). Of course QuadroCopters doesn’t fit as perfect as they did to my former study field. But here I get more support. So I decided to start a workshop for students and some fellow workers with the aim to build a QuadroCopter from “scratch”. To make the whole stuff not to difficult we took the NG.UAVP project as base.
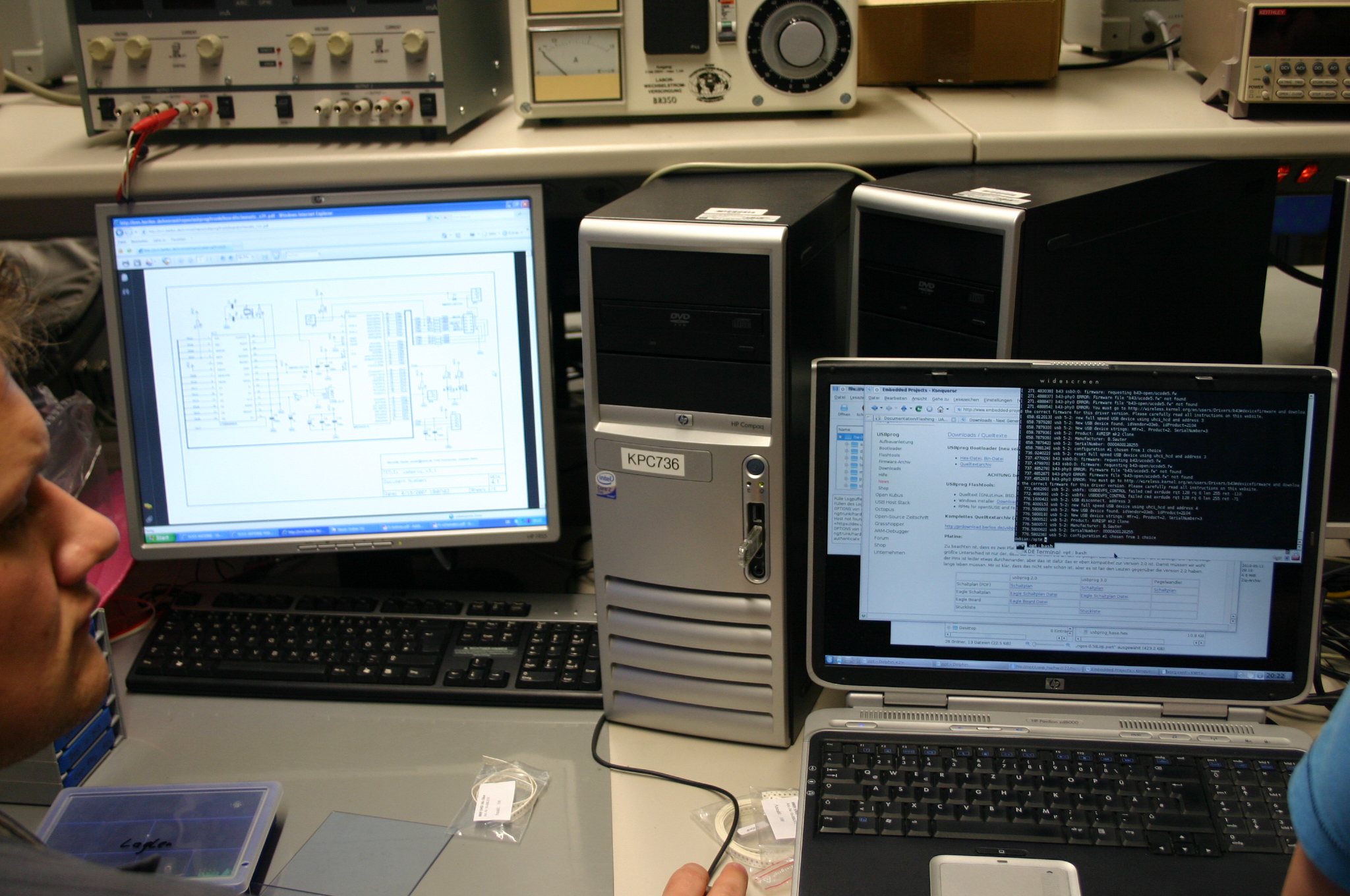
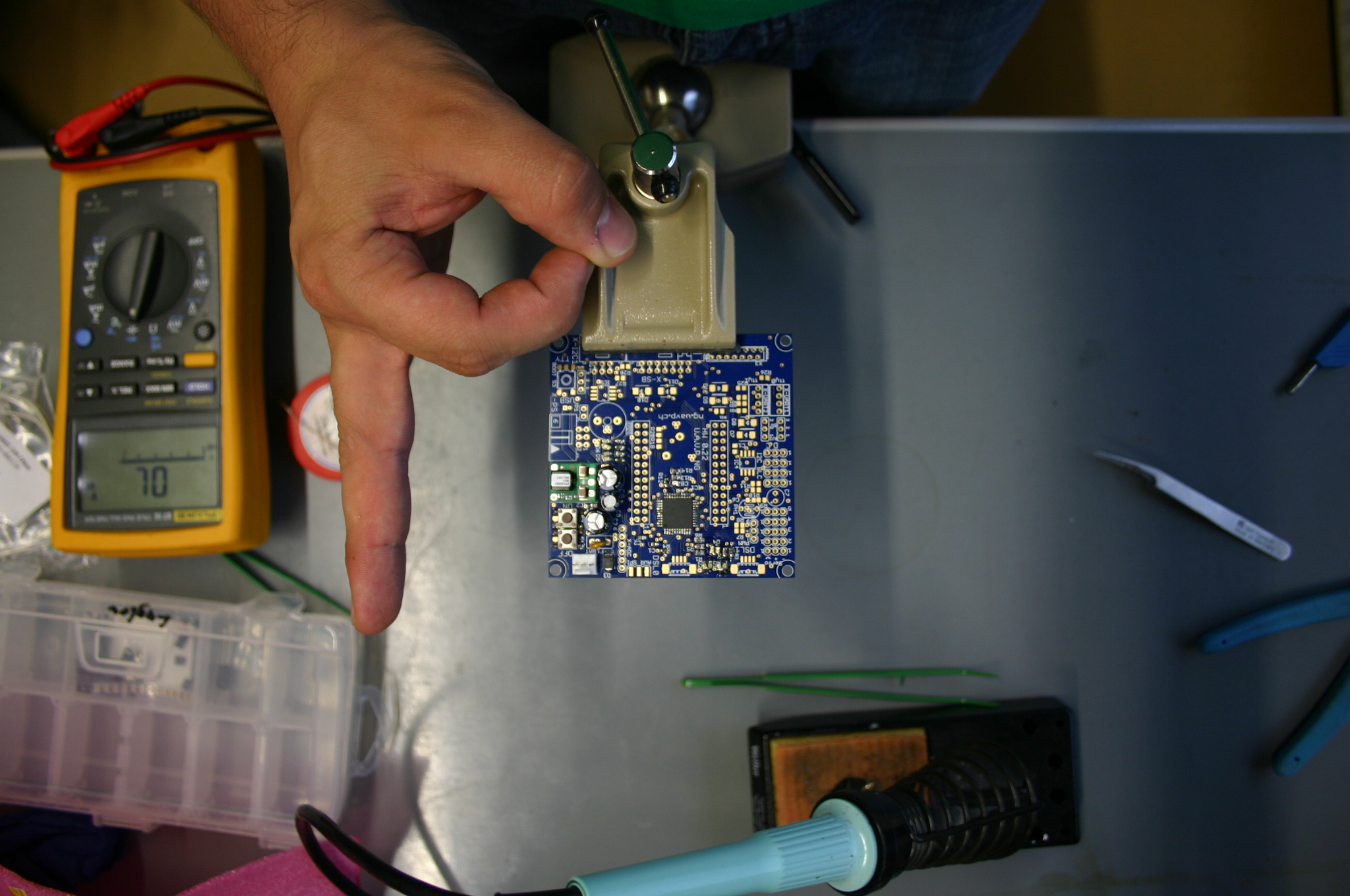
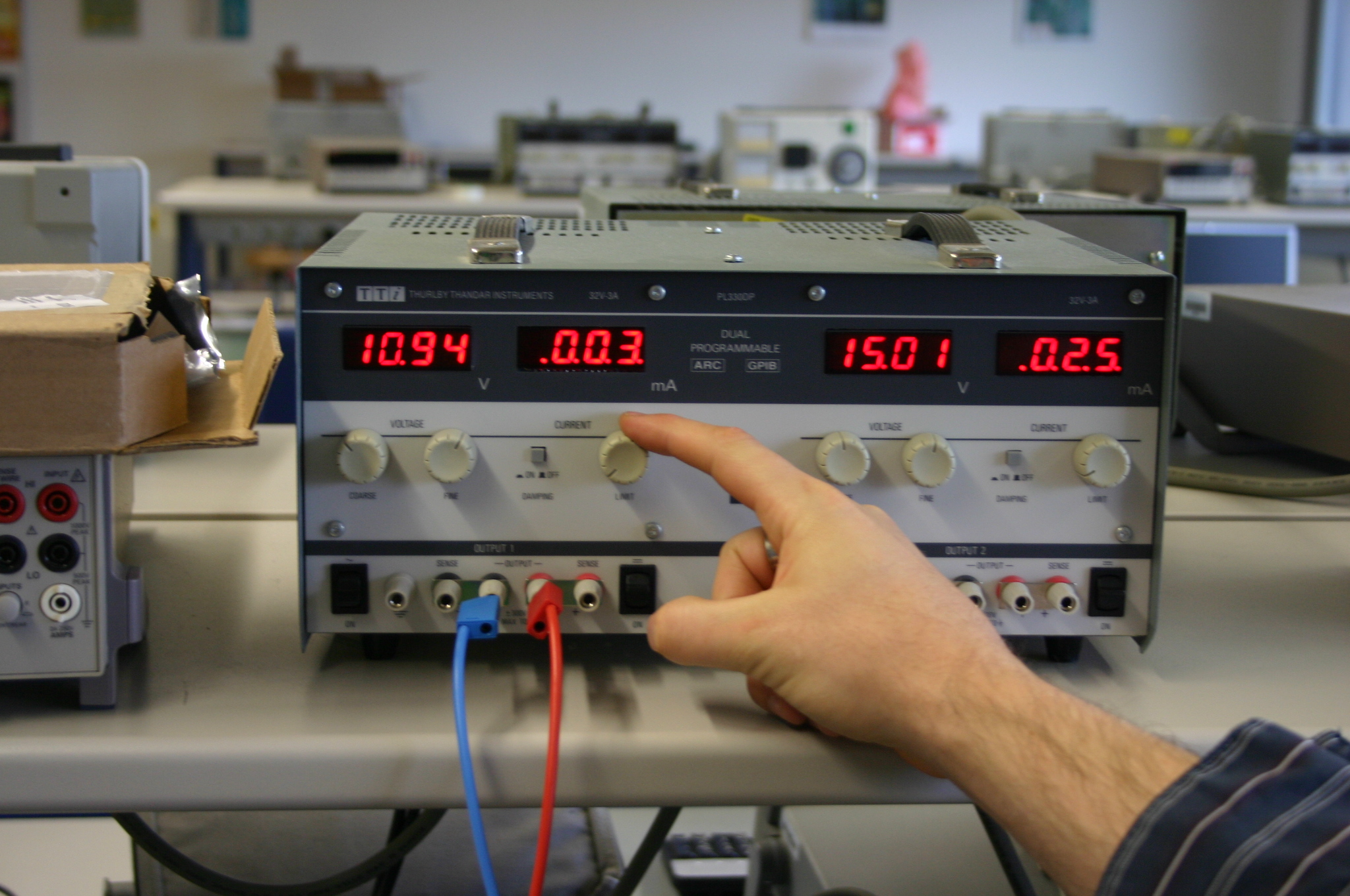
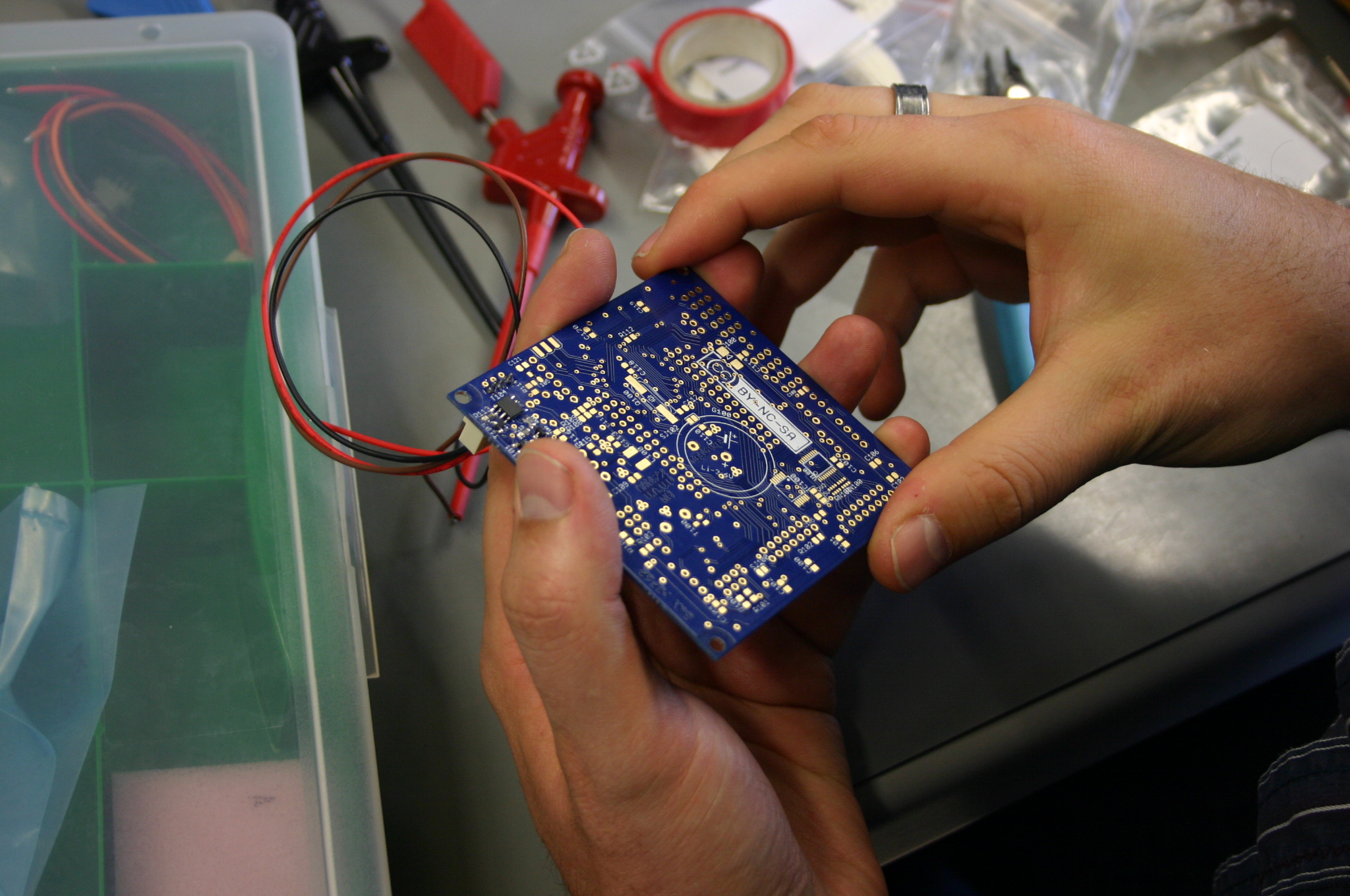
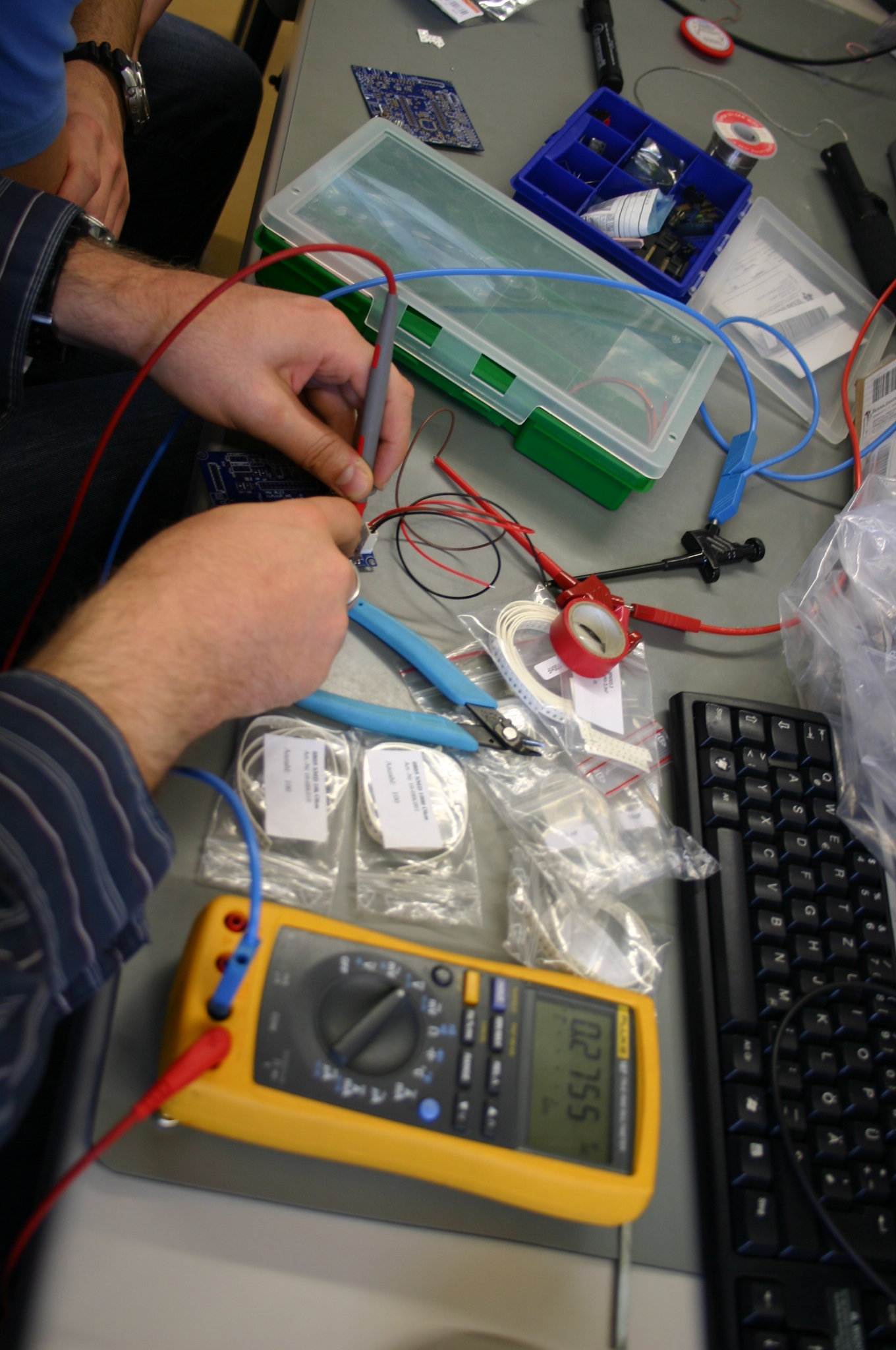
So here we are, some impression of our first workshop, students@work
Markus one of the students who are attending the workshop did a short fast motion video 🙂
[local /files/2010/05/Fim1Quadro.flv]
The Video has about 8Mb, so it could take some time to load.