

LAN für Pylontech PV-Akkustatus, OpenDTU und mehr im HomeAssistant
![]()
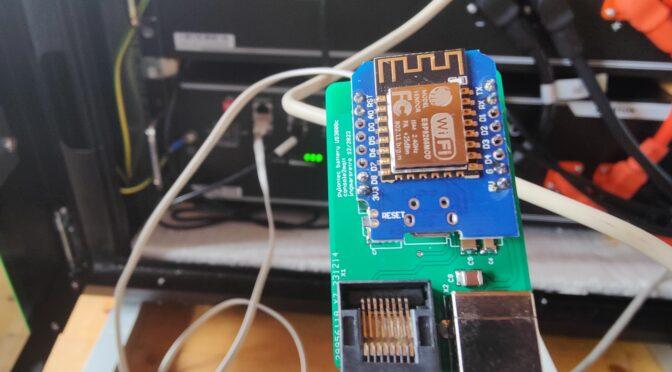
Ein KI-generierter Podcastbeitrag zum Bloginhalt… In dem Beitrag Pylontech PV-Akkustatus im HomeAssistant hatte ich das Projekt „Pylontech-Battery-Monitoring“ der folgenden GitHub Links etwas aufgehübscht und eine Platine gezeichnet, um das ganze Konstrukt etwas kompakter und professioneller aufzubereiten. https://github.com/irekzielinski/Pylontech-Battery-Monitoring https://github.com/hidaba/PylontechMonitoring Im Homeassistant wurden damit, bzw. werden, sämtliche Batteriedaten der Pylontech Akku Module angezeigt. Super! Wenn ich…
Weiterlesen


Recent Comments